 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJeffrey Ichnowski
Self-Supervised Learning of Dynamic Planar Manipulation of Free-End Cables
May 15, 2024
Dynamic manipulation of free-end cables has applications for cable management in homes, warehouses and manufacturing plants. We present a supervised learning approach for dynamic manipulation of free-end cables, focusing on the problem of getting the cable endpoint to a designated target position, which may lie outside the reachable workspace of the robot end effector. We present a simulator, tune it to closely match experiments with physical cables, and then collect training data for learning dynamic cable manipulation. We evaluate with 3 cables and a physical UR5 robot. Results over 32x5 trials on 3 cables suggest that a physical UR5 robot can attain a median error distance ranging from 22% to 35% of the cable length among cables, outperforming an analytic baseline by 21% and a Gaussian Process baseline by 7% with lower interquartile range (IQR).
Residual-NeRF: Learning Residual NeRFs for Transparent Object Manipulation
May 10, 2024Transparent objects are ubiquitous in industry, pharmaceuticals, and households. Grasping and manipulating these objects is a significant challenge for robots. Existing methods have difficulty reconstructing complete depth maps for challenging transparent objects, leaving holes in the depth reconstruction. Recent work has shown neural radiance fields (NeRFs) work well for depth perception in scenes with transparent objects, and these depth maps can be used to grasp transparent objects with high accuracy. NeRF-based depth reconstruction can still struggle with especially challenging transparent objects and lighting conditions. In this work, we propose Residual-NeRF, a method to improve depth perception and training speed for transparent objects. Robots often operate in the same area, such as a kitchen. By first learning a background NeRF of the scene without transparent objects to be manipulated, we reduce the ambiguity faced by learning the changes with the new object. We propose training two additional networks: a residual NeRF learns to infer residual RGB values and densities, and a Mixnet learns how to combine background and residual NeRFs. We contribute synthetic and real experiments that suggest Residual-NeRF improves depth perception of transparent objects. The results on synthetic data suggest Residual-NeRF outperforms the baselines with a 46.1% lower RMSE and a 29.5% lower MAE. Real-world qualitative experiments suggest Residual-NeRF leads to more robust depth maps with less noise and fewer holes. Website: https://residual-nerf.github.io
POE: Acoustic Soft Robotic Proprioception for Omnidirectional End-effectors
Jan 17, 2024Soft robotic shape estimation and proprioception are challenging because of soft robot's complex deformation behaviors and infinite degrees of freedom. A soft robot's continuously deforming body makes it difficult to integrate rigid sensors and to reliably estimate its shape. In this work, we present Proprioceptive Omnidirectional End-effector (POE), which has six embedded microphones across the tendon-driven soft robot's surface. We first introduce novel applications of previously proposed 3D reconstruction methods to acoustic signals from the microphones for soft robot shape proprioception. To improve the proprioception pipeline's training efficiency and model prediction consistency, we present POE-M. POE-M first predicts key point positions from the acoustic signal observations with the embedded microphone array. Then we utilize an energy-minimization method to reconstruct a physically admissible high-resolution mesh of POE given the estimated key points. We evaluate the mesh reconstruction module with simulated data and the full POE-M pipeline with real-world experiments. We demonstrate that POE-M's explicit guidance of the key points during the mesh reconstruction process provides robustness and stability to the pipeline with ablation studies. POE-M reduced the maximum Chamfer distance error by 23.10 % compared to the state-of-the-art end-to-end soft robot proprioception models and achieved 4.91 mm average Chamfer distance error during evaluation.
MD-Splatting: Learning Metric Deformation from 4D Gaussians in Highly Deformable Scenes
Nov 30, 2023Accurate 3D tracking in highly deformable scenes with occlusions and shadows can facilitate new applications in robotics, augmented reality, and generative AI. However, tracking under these conditions is extremely challenging due to the ambiguity that arises with large deformations, shadows, and occlusions. We introduce MD-Splatting, an approach for simultaneous 3D tracking and novel view synthesis, using video captures of a dynamic scene from various camera poses. MD-Splatting builds on recent advances in Gaussian splatting, a method that learns the properties of a large number of Gaussians for state-of-the-art and fast novel view synthesis. MD-Splatting learns a deformation function to project a set of Gaussians with non-metric, thus canonical, properties into metric space. The deformation function uses a neural-voxel encoding and a multilayer perceptron (MLP) to infer Gaussian position, rotation, and a shadow scalar. We enforce physics-inspired regularization terms based on local rigidity, conservation of momentum, and isometry, which leads to trajectories with smaller trajectory errors. MD-Splatting achieves high-quality 3D tracking on highly deformable scenes with shadows and occlusions. Compared to state-of-the-art, we improve 3D tracking by an average of 23.9 %, while simultaneously achieving high-quality novel view synthesis. With sufficient texture such as in scene 6, MD-Splatting achieves a median tracking error of 3.39 mm on a cloth of 1 x 1 meters in size. Project website: https://md-splatting.github.io/.
FogROS2-Sky: Optimizing Latency and Cost for Multi-Cloud Robot Applications
Nov 09, 2023This paper studies the cost-performance tradeoffs in cloud robotics with heterogeneous cloud service providers, which have complex pricing models and varying application requirements. We present FogROS2-Sky, a cost-efficient open source robotics platform that offloads unmodified ROS2 applications to multiple cloud providers and enables fine-grained cost analysis for ROS2 applications' communication with multiple cloud providers. As each provider offers different options for CPU, GPU, memory, and latency, it can be very difficult for users to decide which to choose. FogROS2-Sky includes an optimization algorithm, which either finds the best available hardware specification that fulfills the user's latency and cost constraints or reports that such a specification does not exist. We use FogROS2-Sky to perform time-cost analysis on three robotics applications: visual SLAM, grasp planning, and motion planning. We are able to sample different hardware setups at nearly half the cost while still create cost and latency functions suitable for the optimizer. We also evaluate the optimizer's efficacy for these applications with the Pareto frontier and show that the optimizer selects efficient hardware configurations to balance cost and latency. Videos and code are available on the website https://sites.google.com/view/fogros2-sky
The Teenager's Problem: Efficient Garment Decluttering With Grasp Optimization
Oct 25, 2023This paper addresses the ''Teenager's Problem'': efficiently removing scattered garments from a planar surface. As grasping and transporting individual garments is highly inefficient, we propose analytical policies to select grasp locations for multiple garments using an overhead camera. Two classes of methods are considered: depth-based, which use overhead depth data to find efficient grasps, and segment-based, which use segmentation on the RGB overhead image (without requiring any depth data); grasp efficiency is measured by Objects per Transport, which denotes the average number of objects removed per trip to the laundry basket. Experiments suggest that both depth- and segment-based methods easily reduce Objects per Transport (OpT) by $20\%$; furthermore, these approaches complement each other, with combined hybrid methods yielding improvements of $34\%$. Finally, a method employing consolidation (with segmentation) is considered, which manipulates the garments on the work surface to increase OpT; this yields an improvement of $67\%$ over the baseline, though at a cost of additional physical actions.
FogROS2-SGC: A ROS2 Cloud Robotics Platform for Secure Global Connectivity
Jun 29, 2023
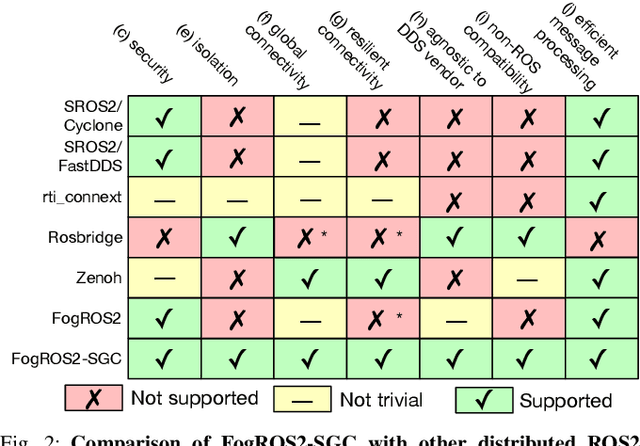


The Robot Operating System (ROS2) is the most widely used software platform for building robotics applications. FogROS2 extends ROS2 to allow robots to access cloud computing on demand. However, ROS2 and FogROS2 assume that all robots are locally connected and that each robot has full access and control of the other robots. With applications like distributed multi-robot systems, remote robot control, and mobile robots, robotics increasingly involves the global Internet and complex trust management. Existing approaches for connecting disjoint ROS2 networks lack key features such as security, compatibility, efficiency, and ease of use. We introduce FogROS2-SGC, an extension of FogROS2 that can effectively connect robot systems across different physical locations, networks, and Data Distribution Services (DDS). With globally unique and location-independent identifiers, FogROS2-SGC securely and efficiently routes data between robotics components around the globe. FogROS2-SGC is agnostic to the ROS2 distribution and configuration, is compatible with non-ROS2 software, and seamlessly extends existing ROS2 applications without any code modification. Experiments suggest FogROS2-SGC is 19x faster than rosbridge (a ROS2 package with comparable features, but lacking security). We also apply FogROS2-SGC to 4 robots and compute nodes that are 3600km apart. Videos and code are available on the project website https://sites.google.com/view/fogros2-sgc.
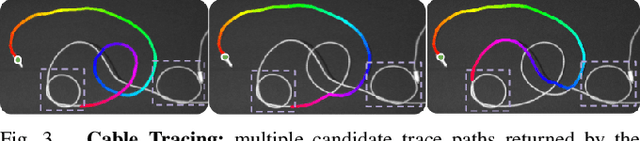
Learning to Trace and Untangle Semi-planar Knots (TUSK)
Mar 15, 2023

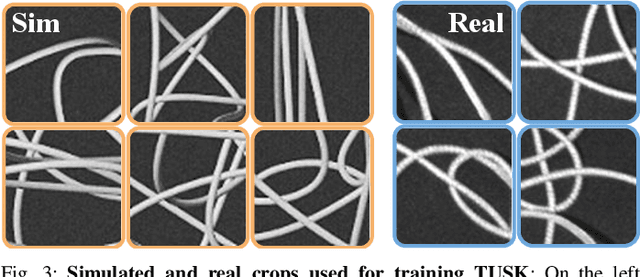
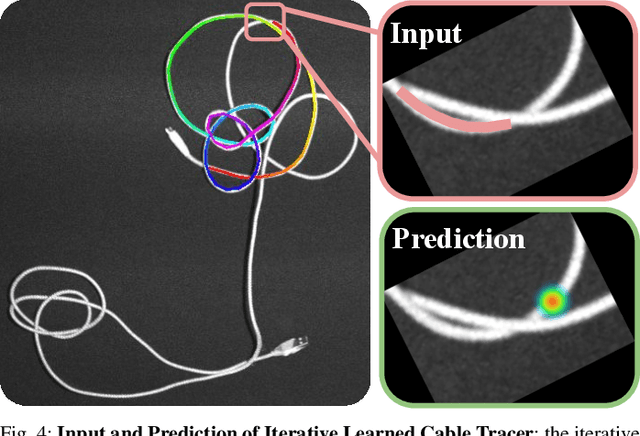
This paper extends prior work on untangling long cables and presents TUSK (Tracing to Untangle Semi-planar Knots), a learned cable-tracing algorithm that resolves over-crossings and undercrossings to recognize the structure of knots and grasp points for untangling from a single RGB image. This work focuses on semi-planar knots, which are knots composed of crossings that each include at most 2 cable segments. We conduct experiments on long cables (3 m in length) with up to 15 semi-planar crossings across 6 different knot types. Crops of crossings from 3 knots (overhand, figure 8, and bowline) of the 6 are seen during training, but none of the full knots are seen during training. This is an improvement from prior work on long cables that can only untangle 2 knot types. Experiments find that in settings with multiple identical cables, TUSK can trace a single cable with 81% accuracy on 7 new knot types. In single-cable images, TUSK can trace and identify the correct knot with 77% success on 3 new knot types. We incorporate TUSK into a bimanual robot system and find that it successfully untangles 64% of cable configurations, including those with new knots unseen during training, across 3 levels of difficulty. Supplementary material, including an annotated dataset of 500 RGB-D images of a knotted cable along with ground-truth traces, can be found at https://sites.google.com/view/tusk-rss.
Learning to Efficiently Plan Robust Frictional Multi-Object Grasps
Oct 13, 2022



We consider a decluttering problem where multiple rigid convex polygonal objects rest in randomly placed positions and orientations on a planar surface and must be efficiently transported to a packing box using both single and multi-object grasps. Prior work considered frictionless multi-object grasping. In this paper, we introduce friction to increase picks per hour. We train a neural network using real examples to plan robust multi-object grasps. In physical experiments, we find an 11.7% increase in success rates, a 1.7x increase in picks per hour, and an 8.2x decrease in grasp planning time compared to prior work on multi-object grasping. Videos are available at https://youtu.be/pEZpHX5FZIs.
SGTM 2.0: Autonomously Untangling Long Cables using Interactive Perception
Sep 27, 2022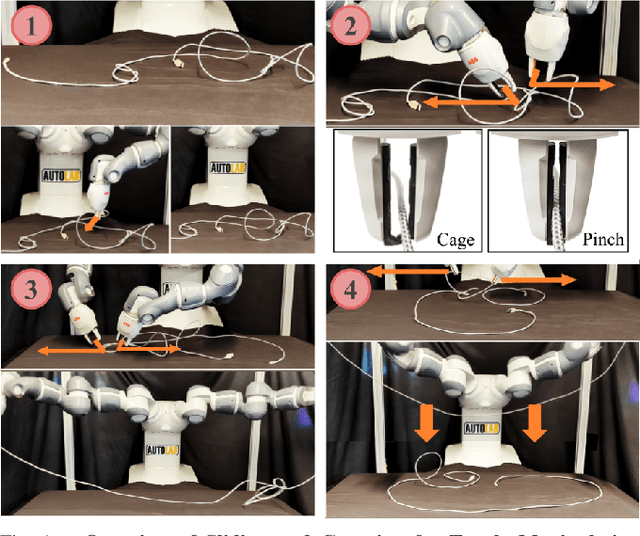


Cables are commonplace in homes, hospitals, and industrial warehouses and are prone to tangling. This paper extends prior work on autonomously untangling long cables by introducing novel uncertainty quantification metrics and actions that interact with the cable to reduce perception uncertainty. We present Sliding and Grasping for Tangle Manipulation 2.0 (SGTM 2.0), a system that autonomously untangles cables approximately 3 meters in length with a bilateral robot using estimates of uncertainty at each step to inform actions. By interactively reducing uncertainty, Sliding and Grasping for Tangle Manipulation 2.0 (SGTM 2.0) reduces the number of state-resetting moves it must take, significantly speeding up run-time. Experiments suggest that SGTM 2.0 can achieve 83% untangling success on cables with 1 or 2 overhand and figure-8 knots, and 70% termination detection success across these configurations, outperforming SGTM 1.0 by 43% in untangling accuracy and 200% in full rollout speed. Supplementary material, visualizations, and videos can be found at sites.google.com/view/sgtm2.