 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJianing Song
A Generalized Framework with Adaptive Weighted Soft-Margin for Imbalanced SVM Classification
Mar 13, 2024
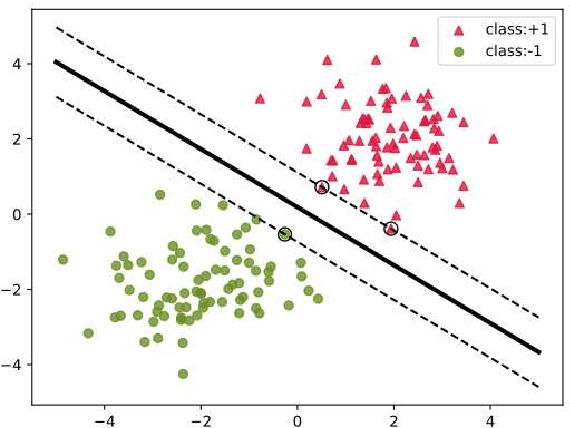
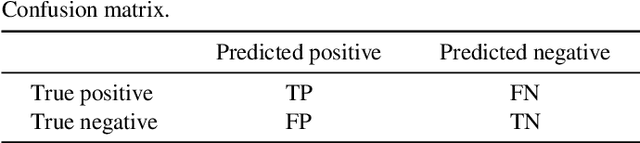
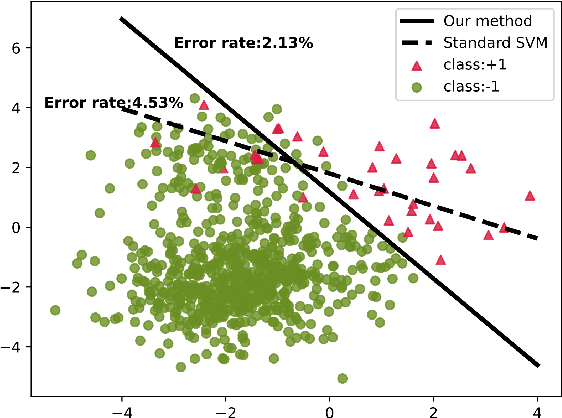
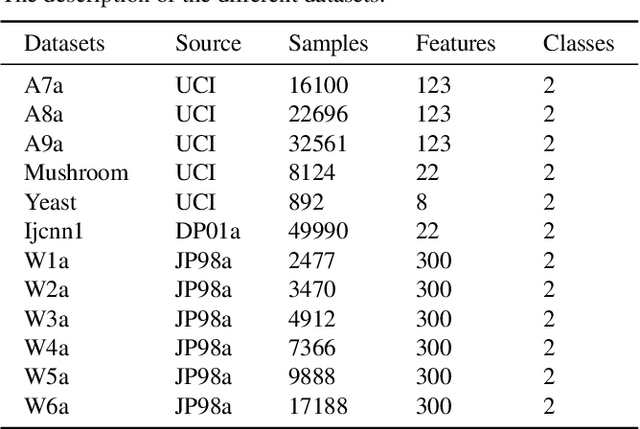
Category imbalance is one of the most popular and important issues in the domain of classification. In this paper, we present a new generalized framework with Adaptive Weight function for soft-margin Weighted SVM (AW-WSVM), which aims to enhance the issue of imbalance and outlier sensitivity in standard support vector machine (SVM) for classifying two-class data. The weight coefficient is introduced into the unconstrained soft-margin support vector machines, and the sample weights are updated before each training. The Adaptive Weight function (AW function) is constructed from the distance between the samples and the decision hyperplane, assigning different weights to each sample. A weight update method is proposed, taking into account the proximity of the support vectors to the decision hyperplane. Before training, the weights of the corresponding samples are initialized according to different categories. Subsequently, the samples close to the decision hyperplane are identified and assigned more weights. At the same time, lower weights are assigned to samples that are far from the decision hyperplane. Furthermore, we also put forward an effective way to eliminate noise. To evaluate the strength of the proposed generalized framework, we conducted experiments on standard datasets and emotion classification datasets with different imbalanced ratios (IR). The experimental results prove that the proposed generalized framework outperforms in terms of accuracy, recall metrics and G-mean, validating the effectiveness of the weighted strategy provided in this paper in enhancing support vector machines.
Deep Learning-based Spacecraft Relative Navigation Methods: A Survey
Aug 19, 2021



Autonomous spacecraft relative navigation technology has been planned for and applied to many famous space missions. The development of on-board electronics systems has enabled the use of vision-based and LiDAR-based methods to achieve better performances. Meanwhile, deep learning has reached great success in different areas, especially in computer vision, which has also attracted the attention of space researchers. However, spacecraft navigation differs from ground tasks due to high reliability requirements but lack of large datasets. This survey aims to systematically investigate the current deep learning-based autonomous spacecraft relative navigation methods, focusing on concrete orbital applications such as spacecraft rendezvous and landing on small bodies or the Moon. The fundamental characteristics, primary motivations, and contributions of deep learning-based relative navigation algorithms are first summarised from three perspectives of spacecraft rendezvous, asteroid exploration, and terrain navigation. Furthermore, popular visual tracking benchmarks and their respective properties are compared and summarised. Finally, potential applications are discussed, along with expected impediments.