 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJim Torresen
A comparative study on machine learning approaches for rock mass classification using drilling data
Mar 15, 2024




Current rock engineering design in drill and blast tunnelling primarily relies on engineers' observational assessments. Measure While Drilling (MWD) data, a high-resolution sensor dataset collected during tunnel excavation, is underutilised, mainly serving for geological visualisation. This study aims to automate the translation of MWD data into actionable metrics for rock engineering. It seeks to link data to specific engineering actions, thus providing critical decision support for geological challenges ahead of the tunnel face. Leveraging a large and geologically diverse dataset of 500,000 drillholes from 15 tunnels, the research introduces models for accurate rock mass quality classification in a real-world tunnelling context. Both conventional machine learning and image-based deep learning are explored to classify MWD data into Q-classes and Q-values, examples of metrics describing the stability of the rock mass, using both tabular and image data. The results indicate that the K-nearest neighbours algorithm in an ensemble with tree-based models using tabular data, effectively classifies rock mass quality. It achieves a cross-validated balanced accuracy of 0.86 in classifying rock mass into the Q-classes A, B, C, D, E1, E2, and 0.95 for a binary classification with E versus the rest. Classification using a CNN with MWD-images for each blasting round resulted in a balanced accuracy of 0.82 for binary classification. Regressing the Q-value from tabular MWD-data achieved cross-validated R2 and MSE scores of 0.80 and 0.18 for a similar ensemble model as in classification. High performance in regression and classification boosts confidence in automated rock mass assessment. Applying advanced modelling on a unique dataset demonstrates MWD data's value in improving rock mass classification accuracy and advancing data-driven rock engineering design, reducing manual intervention.
Robotics in Elderly Healthcare: A Review of 20 Recent Research Projects
Feb 09, 2023



Studies show dramatic increase in elderly population of Western Europe over the next few decades, which will put pressure on healthcare systems. Measures must be taken to meet these social challenges. Healthcare robots investigated to facilitate independent living for elderly. This paper aims to review recent projects in robotics for healthcare from 2008 to 2021. We provide an overview of the focus in this area and a roadmap for upcoming research. Our study was initiated with a literature search using three digital databases. Searches were performed for articles, including research projects containing the words elderly care, assisted aging, health monitoring, or elderly health, and any word including the root word robot. The resulting 20 recent research projects are described and categorized in this paper. Then, these projects were analyzed using thematic analysis. Our findings can be summarized in common themes: most projects have a strong focus on care robots functionalities; robots are often seen as products in care settings; there is an emphasis on robots as commercial products; and there is some limited focus on the design and ethical aspects of care robots. The paper concludes with five key points representing a roadmap for future research addressing robotic for elderly people.
Adherence Forecasting for Guided Internet-Delivered Cognitive Behavioral Therapy: A Minimally Data-Sensitive Approach
Jan 11, 2022



Internet-delivered psychological treatments (IDPT) are seen as an effective and scalable pathway to improving the accessibility of mental healthcare. Within this context, treatment adherence is an especially relevant challenge to address due to the reduced interaction between healthcare professionals and patients, compared to more traditional interventions. In parallel, there are increasing regulations when using peoples' personal data, especially in the digital sphere. In such regulations, data minimization is often a core tenant such as within the General Data Protection Regulation (GDPR). Consequently, this work proposes a deep-learning approach to perform automatic adherence forecasting, while only relying on minimally sensitive login/logout data. This approach was tested on a dataset containing 342 patients undergoing guided internet-delivered cognitive behavioral therapy (G-ICBT) treatment. The proposed Self-Attention Network achieved over 70% average balanced accuracy, when only 1/3 of the treatment duration had elapsed. As such, this study demonstrates that automatic adherence forecasting for G-ICBT, is achievable using only minimally sensitive data, thus facilitating the implementation of such tools within real-world IDPT platforms.
Long-Short Ensemble Network for Bipolar Manic-Euthymic State Recognition Based on Wrist-worn Sensors
Jul 01, 2021



Manic episodes of bipolar disorder can lead to uncritical behaviour and delusional psychosis, often with destructive consequences for those affected and their surroundings. Early detection and intervention of a manic episode are crucial to prevent escalation, hospital admission and premature death. However, people with bipolar disorder may not recognize that they are experiencing a manic episode and symptoms such as euphoria and increased productivity can also deter affected individuals from seeking help. This work proposes to perform user-independent, automatic mood-state detection based on actigraphy and electrodermal activity acquired from a wrist-worn device during mania and after recovery (euthymia). This paper proposes a new deep learning-based ensemble method leveraging long (20h) and short (5 minutes) time-intervals to discriminate between the mood-states. When tested on 47 bipolar patients, the proposed classification scheme achieves an average accuracy of 91.59% in euthymic/manic mood-state recognition.
Environmental Adaptation of Robot Morphology and Control through Real-world Evolution
Mar 30, 2020



Robots operating in the real world will experience a range of different environments and tasks. It is essential for the robot to have the ability to adapt to its surroundings to work efficiently in changing conditions. Evolutionary robotics aims to solve this by optimizing both the control and body (morphology) of a robot, allowing adaptation to internal, as well as external factors. Most work in this field has been done in physics simulators, which are relatively simple and not able to replicate the richness of interactions found in the real world. Solutions that rely on the complex interplay between control, body, and environment are therefore rarely found. In this paper, we rely solely on real-world evaluations and apply evolutionary search to yield combinations of morphology and control for our mechanically self-reconfiguring quadruped robot. We evolve solutions on two very different physical surfaces and analyze the results in terms of both control and morphology. We then transition to two previously unseen surfaces to demonstrate the generality of our method. We find that the evolutionary search adapts both control and body to the different physical environments, yielding significantly different morphology-controller configurations. Moreover, we observe that the solutions found by our method work well on previously unseen terrains.
Differences of Human Perceptions of a Robot Moving using Linear or Slow in, Slow out Velocity Profiles When Performing a Cleaning Task
Mar 25, 2020



We investigated how a robot moving with different velocity profiles affects a person's perception of it when working together on a task. The two profiles are the common linear profile and a profile based on the animation principles of slow in, slow out. The investigation was accomplished by running an experiment in a home context where people and the robot cooperated on a clean-up task. We used the Godspeed series of questionnaires to gather people's perception of the robot. Average scores for each series appear not to be different enough to reject the null hypotheses, but looking at the component items provides paths to future areas of research. We also discuss the scenario for the experiment and how it may be used for future research into using animation techniques for moving robots and improving the legibility of a robot's locomotion.
* 8 pages, 8 figures, 5 tables, 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)
Self-Adapting Goals Allow Transfer of Predictive Models to New Tasks
May 15, 2019
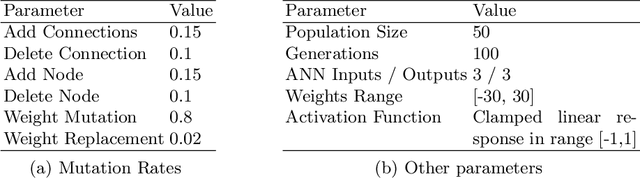
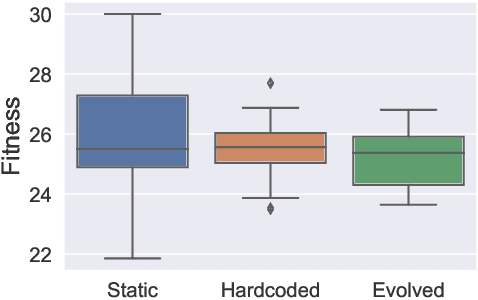
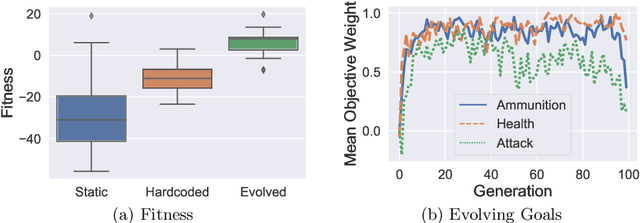
A long-standing challenge in Reinforcement Learning is enabling agents to learn a model of their environment which can be transferred to solve other problems in a world with the same underlying rules. One reason this is difficult is the challenge of learning accurate models of an environment. If such a model is inaccurate, the agent's plans and actions will likely be sub-optimal, and likely lead to the wrong outcomes. Recent progress in model-based reinforcement learning has improved the ability for agents to learn and use predictive models. In this paper, we extend a recent deep learning architecture which learns a predictive model of the environment that aims to predict only the value of a few key measurements, which are be indicative of an agent's performance. Predicting only a few measurements rather than the entire future state of an environment makes it more feasible to learn a valuable predictive model. We extend this predictive model with a small, evolving neural network that suggests the best goals to pursue in the current state. We demonstrate that this allows the predictive model to transfer to new scenarios where goals are different, and that the adaptive goals can even adjust agent behavior on-line, changing its strategy to fit the current context.
An Interactive Musical Prediction System with Mixture Density Recurrent Neural Networks
Apr 10, 2019



This paper is about creating digital musical instruments where a predictive neural network model is integrated into the interactive system. Rather than predicting symbolic music (e.g., MIDI notes), we suggest that predicting future control data from the user and precise temporal information can lead to new and interesting interactive possibilities. We propose that a mixture density recurrent neural network (MDRNN) is an appropriate model for this task. The predictions can be used to fill-in control data when the user stops performing, or as a kind of filter on the user's own input. We present an interactive MDRNN prediction server that allows rapid prototyping of new NIMEs featuring predictive musical interaction by recording datasets, training MDRNN models, and experimenting with interaction modes. We illustrate our system with several example NIMEs applying this idea. Our evaluation shows that real-time predictive interaction is viable even on single-board computers and that small models are appropriate for small datasets.
Animation Techniques in Human-Robot Interaction User Studies: a Systematic Literature Review
Apr 04, 2019



There are many different ways a robot can move in Human-Robot Interaction. One way is to use techniques from film animation to instruct the robot to move. This article is a systematic literature review of human-robot trials, pilots, and evaluations that have applied techniques from animation to move a robot. Through 27 articles, we find that animation techniques improves individual's interaction with robots, improving individual's perception of qualities of a robot, understanding what a robot intends to do, and showing the robot's state, or possible emotion. Animation techniques also help people relate to robots that do not resemble a human or robot. The studies in the articles show further areas for research, such as applying animation principles in other types of robots and situations, combining animation techniques with other modalities, and testing robots moving with animation techniques over the long term.
Self-Modifying Morphology Experiments with DyRET: Dynamic Robot for Embodied Testing
Mar 12, 2019



If robots are to become ubiquitous, they will need to be able to adapt to complex and dynamic environments. Robots that can adapt their bodies while deployed might be flexible and robust enough to meet this challenge. Previous work on dynamic robot morphology has focused on simulation, combining simple modules, or switching between locomotion modes. Here, we present an alternative approach: a self-reconfigurable morphology that allows a single four-legged robot to actively adapt the length of its legs to different environments. We report the design of our robot, as well as the results of a study that verifies the performance impact of self-reconfiguration. This study compares three different control and morphology pairs under different levels of servo supply voltage in the lab. We also performed preliminary tests in different uncontrolled outdoor environments to see if changes to the external environment supports our findings in the lab. Our results show better performance with an adaptable body, lending evidence to the value of self-reconfiguration for quadruped robots.