 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJin Pan
A Large-Scale Dataset for Benchmarking Elevator Button Segmentation and Character Recognition
Mar 22, 2021
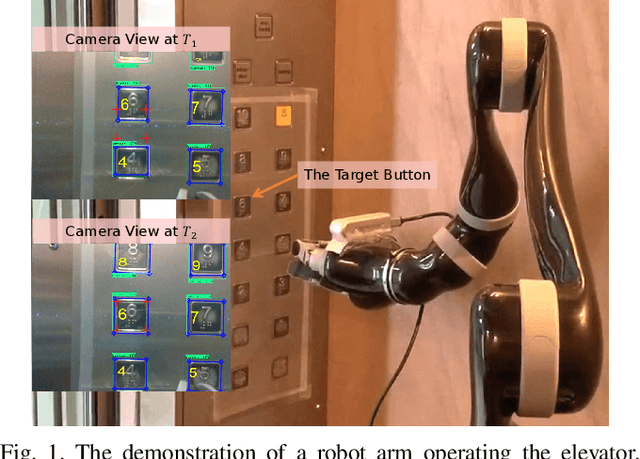
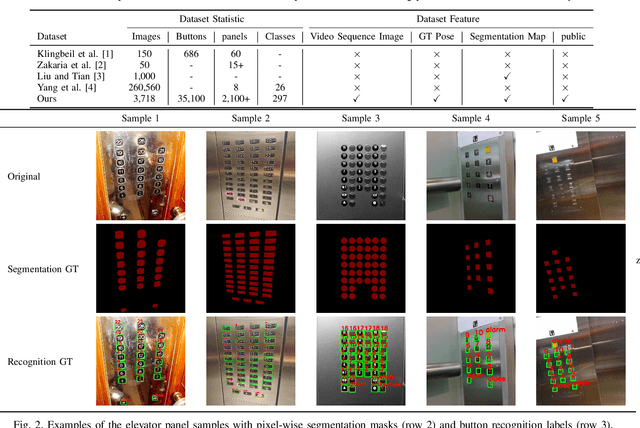
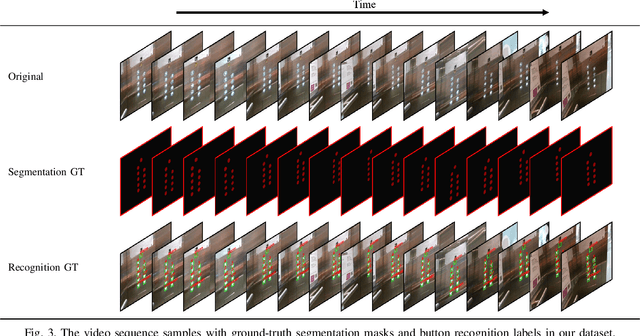
Human activities are hugely restricted by COVID-19, recently. Robots that can conduct inter-floor navigation attract much public attention, since they can substitute human workers to conduct the service work. However, current robots either depend on human assistance or elevator retrofitting, and fully autonomous inter-floor navigation is still not available. As the very first step of inter-floor navigation, elevator button segmentation and recognition hold an important position. Therefore, we release the first large-scale publicly available elevator panel dataset in this work, containing 3,718 panel images with 35,100 button labels, to facilitate more powerful algorithms on autonomous elevator operation. Together with the dataset, a number of deep learning based implementations for button segmentation and recognition are also released to benchmark future methods in the community. The dataset will be available at \url{https://github.com/zhudelong/elevator_button_recognition
Learning to Interrupt: A Hierarchical Deep Reinforcement Learning Framework for Efficient Exploration
Jul 30, 2018



To achieve scenario intelligence, humans must transfer knowledge to robots by developing goal-oriented algorithms, which are sometimes insensitive to dynamically changing environments. While deep reinforcement learning achieves significant success recently, it is still extremely difficult to be deployed in real robots directly. In this paper, we propose a hybrid structure named Option-Interruption in which human knowledge is embedded into a hierarchical reinforcement learning framework. Our architecture has two key components: options, represented by existing human-designed methods, can significantly speed up the training process and interruption mechanism, based on learnable termination functions, enables our system to quickly respond to the external environment. To implement this architecture, we derive a set of update rules based on policy gradient methods and present a complete training process. In the experiment part, our method is evaluated in Four-room navigation and exploration task, which shows the efficiency and flexibility of our framework.