 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJinxin Xu
Mapping New Realities: Ground Truth Image Creation with Pix2Pix Image-to-Image Translation
May 01, 2024
Generative Adversarial Networks (GANs) have significantly advanced image processing, with Pix2Pix being a notable framework for image-to-image translation. This paper explores a novel application of Pix2Pix to transform abstract map images into realistic ground truth images, addressing the scarcity of such images crucial for domains like urban planning and autonomous vehicle training. We detail the Pix2Pix model's utilization for generating high-fidelity datasets, supported by a dataset of paired map and aerial images, and enhanced by a tailored training regimen. The results demonstrate the model's capability to accurately render complex urban features, establishing its efficacy and potential for broad real-world applications.
Vision-based Robotic Arm Imitation by Human Gesture
Oct 04, 2018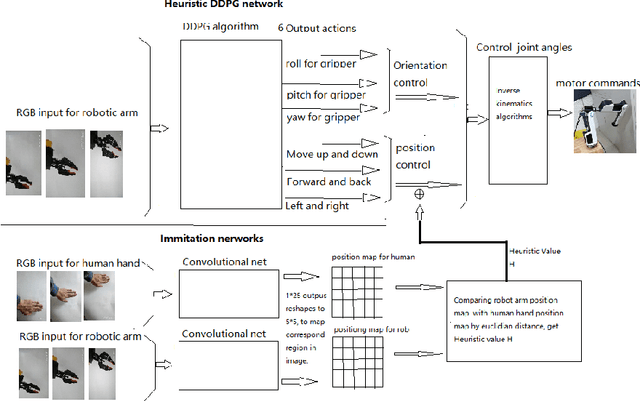
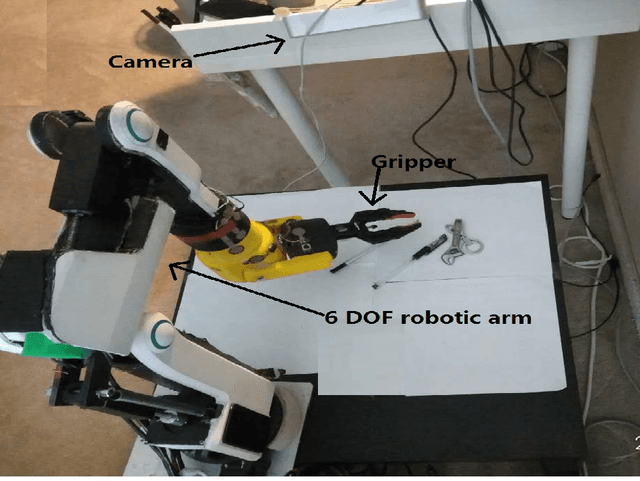
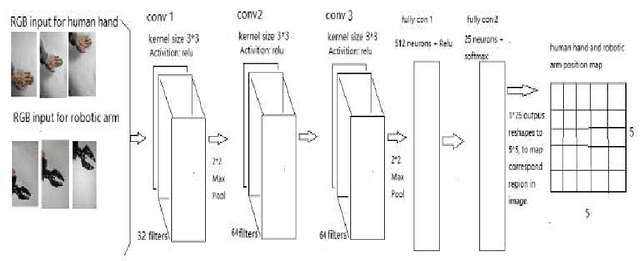
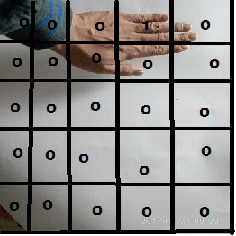
One of the most efficient ways for a learning-based robotic arm to learn to process complex tasks as human, is to directly learn from observing how human complete those tasks, and then imitate. Our idea is based on success of Deep Q-Learning (DQN) algorithm according to reinforcement learning, and then extend to Deep Deterministic Policy Gradient (DDPG) algorithm. We developed a learning-based method, combining modified DDPG and visual imitation network. Our approach acquires frames only from a monocular camera, and no need to either construct a 3D environment or generate actual points. The result we expected during training, was that robot would be able to move as almost the same as how human hands did.