 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJukka Talvitie
Robust Snapshot Radio SLAM
Apr 16, 2024
The intrinsic geometric connections between millimeter-wave (mmWave) signals and the propagation environment can be leveraged for simultaneous localization and mapping (SLAM) in 5G and beyond networks. However, estimated channel parameters that are mismatched to the utilized geometric model can cause the SLAM solution to degrade. In this paper, we propose a robust snapshot radio SLAM algorithm for mixed line-of-sight (LoS) and non-line-of-sight (NLoS) environments that can estimate the unknown user equipment (UE) state, map of the environment as well as the presence of the LoS path. The proposed method can accurately detect outliers and the LoS path, enabling robust estimation in both LoS and NLoS conditions. The proposed method is validated using 60 GHz experimental data, indicating superior performance compared to the state-of-the-art.
Millimeter-wave Radio SLAM: End-to-End Processing Methods and Experimental Validation
Dec 21, 2023In this article, we address the timely topic of cellular bistatic simultaneous localization and mapping (SLAM) with specific focus on complete processing solutions from raw I/Q samples to user equipment (UE) and landmark location information in millimeter-wave (mmWave) networks. Firstly, we propose a new multipath channel parameter estimation solution which operates directly with beam reference signal received power (BRSRP) measurements, alleviating the need to know the true antenna beampatterns or the underlying beamforming weights. Additionally, the method has built-in robustness against unavoidable antenna sidelobes. Secondly, we propose new snapshot SLAM algorithms that have increased robustness and identifiability compared to prior-art, in practical built environments with complex clutter and multi-bounce propagation scenarios. The performance of the proposed methods is assessed at the 60 GHz mmWave band, via both realistic ray-tracing evaluations as well as true experimental measurements, in an indoor environment. Wide set of offered results clearly demonstrate the improved performance, compared to the relevant prior-art, in terms of the channel parameter estimation as well as the end-to-end SLAM performance. Finally, the article provides the measured 60 GHz data openly available for the research community, facilitating results reproducibility as well as further algorithm development.
Joint RIS Calibration and Multi-User Positioning
Dec 08, 2022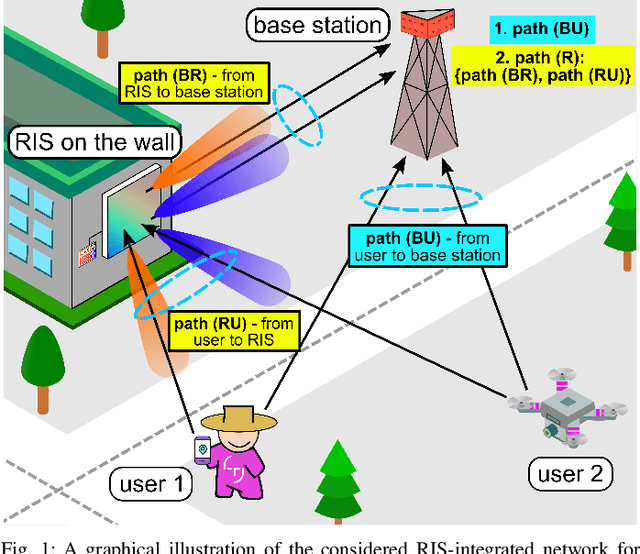
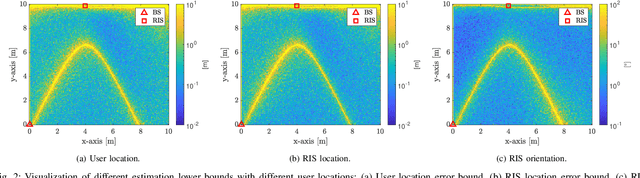
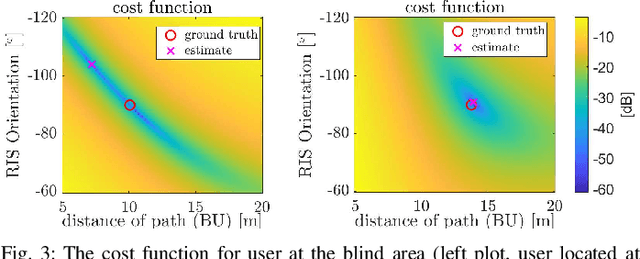
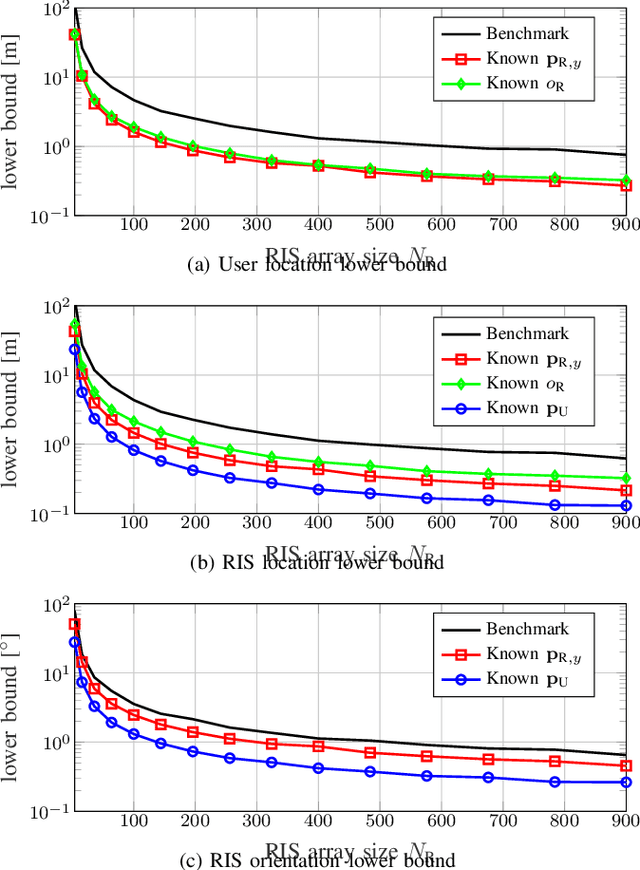
Reconfigurable intelligent surfaces (RISs) are expected to be a key component enabling the mobile network evolution towards a flexible and intelligent 6G wireless platform. In most of the research works so far, RIS has been treated as a passive base station (BS) with a known state, in terms of its location and orientation, to boost the communication and/or terminal positioning performance. However, such performance gains cannot be guaranteed anymore when the RIS state is not perfectly known. In this paper, by taking the RIS state uncertainty into account, we formulate and study the performance of a joint RIS calibration and user positioning (JrCUP) scheme. From the Fisher information perspective, we formulate the JrCUP problem in a network-centric single-input multiple-output (SIMO) scenario with a single BS, and derive the analytical lower bound for the states of both user and RIS. We also demonstrate the geometric impact of different user locations on the JrCUP performance while also characterizing the performance under different RIS sizes. Finally, the study is extended to a multi-user scenario, shown to further improve the state estimation performance.
MmWave Mapping and SLAM for 5G and Beyond
Nov 29, 2022



Device localization and radar-like mapping are at the heart of integrated sensing and communication, enabling not only new services and applications, but can also improve communication quality with reduced overheads. These forms of sensing are however susceptible to data association problems, due to the unknown relation between measurements and detected objects or targets. In this chapter, we provide an overview of the fundamental tools used to solve mapping, tracking, and simultaneous localization and mapping (SLAM) problems. We distinguish the different types of sensing problems and then focus on mapping and SLAM as running examples. Starting from the applicable models and definitions, we describe the different algorithmic approaches, with a particular focus on how to deal with data association problems. In particular, methods based on random finite set theory and Bayesian graphical models are introduced in detail. A numerical study with synthetic and experimental data is then used to compare these approaches in a variety of scenarios.
Doppler Exploitation in Bistatic mmWave Radio SLAM
Aug 22, 2022



Networks in 5G and beyond utilize millimeter wave (mmWave) radio signals, large bandwidths, and large antenna arrays, which bring opportunities in jointly localizing the user equipment and mapping the propagation environment, termed as simultaneous localization and mapping (SLAM). Existing approaches mainly rely on delays and angles, and ignore the Doppler, although it contains geometric information. In this paper, we study the benefits of exploiting Doppler in SLAM through deriving the posterior Cram\'er-Rao bounds (PCRBs) and formulating the extended Kalman-Poisson multi-Bernoulli sequential filtering solution with Doppler as one of the involved measurements. Both theoretical PCRB analysis and simulation results demonstrate the efficacy of utilizing Doppler.
A CNN Approach for 5G mmWave Positioning Using Beamformed CSI Measurements
Apr 30, 2022



The advent of Artificial Intelligence (AI) has impacted all aspects of human life. One of the concrete examples of AI impact is visible in radio positioning. In this article, for the first time we utilize the power of AI by training a Convolutional Neural Network (CNN) using 5G New Radio (NR) fingerprints consisting of beamformed Channel State Information (CSI). By observing CSI, it is possible to characterize the multipath channel between the transmitter and the receiver, and thus provide a good source of spatiotemporal data to find the position of a User Equipment (UE). We collect ray-tracing-based 5G NR CSI from an urban area. The CSI data of the signals from one Base Station (BS) is collected at the reference points with known positions to train a CNN. We evaluate our work by testing: a) the robustness of the trained network for estimating the positions for the new measurements on the same reference points and b) the accuracy of the CNN-based position estimation while the UE is on points other than the reference points. The results prove that our trained network for a specific urban environment can estimate the UE position with a minimum mean error of 0.98 m.
Iterated Posterior Linearization PMB Filter for 5G SLAM
Dec 05, 2021



5G millimeter wave (mmWave) signals have inherent geometric connections to the propagation channel and the propagation environment. Thus, they can be used to jointly localize the receiver and map the propagation environment, which is termed as simultaneous localization and mapping (SLAM). One of the most important tasks in the 5G SLAM is to deal with the nonlinearity of the measurement model. To solve this problem, existing 5G SLAM approaches rely on sigma-point or extended Kalman filters, linearizing the measurement function with respect to the prior probability density function (PDF). In this paper, we study the linearization of the measurement function with respect to the posterior PDF, and implement the iterated posterior linearization filter into the Poisson multi-Bernoulli SLAM filter. Simulation results demonstrate the accuracy and precision improvements of the resulting SLAM filter.
A Computationally Efficient EK-PMBM Filter for Bistatic mmWave Radio SLAM
Sep 08, 2021



Millimeter wave (mmWave) signals are useful for simultaneous localization and mapping (SLAM), due to their inherent geometric connection to the propagation environment and the propagation channel. To solve the SLAM problem, existing approaches rely on sigma-point or particle-based approximations, leading to high computational complexity, precluding real-time execution. We propose a novel low-complexity SLAM filter, based on the Poisson multi-Bernoulli mixture (PMBM) filter. It utilizes the extended Kalman (EK) first-order Taylor series based Gaussian approximation of the filtering distribution, and applies the track-oriented marginal multi-Bernoulli/Poisson (TOMB/P) algorithm to approximate the resulting PMBM as a Poisson multi-Bernoulli (PMB). The filter can account for different landmark types in radio SLAM and multiple data association hypotheses. Hence, it has an adjustable complexity/performance trade-off. Simulation results show that the developed SLAM filter can greatly reduce the computational cost, while it keeps the good performance of mapping and user state estimation.
mmWave Simultaneous Localization and Mapping Using a Computationally Efficient EK-PHD Filter
Aug 03, 2021



Future cellular networks that utilize millimeter wave signals provide new opportunities in positioning and situational awareness. Large bandwidths combined with large antenna arrays provide unparalleled delay and angle resolution, allowing high accuracy localization but also building up a map of the environment. Even the most basic filter intended for simultaneous localization and mapping exhibits high computational overhead since the methods rely on sigma point or particle-based approximations. In this paper, a first order Taylor series based Gaussian approximation of the filtering distribution is used and it is demonstrated that the developed extended Kalman probability hypothesis density filter is computationally very efficient. In addition, the results imply that efficiency does not come with the expense of estimation accuracy since the method nearly achieves the position error bound.
HybridDeepRx: Deep Learning Receiver for High-EVM Signals
Jun 30, 2021



In this paper, we propose a machine learning (ML) based physical layer receiver solution for demodulating OFDM signals that are subject to a high level of nonlinear distortion. Specifically, a novel deep learning based convolutional neural network receiver is devised, containing layers in both time- and frequency domains, allowing to demodulate and decode the transmitted bits reliably despite the high error vector magnitude (EVM) in the transmit signal. Extensive set of numerical results is provided, in the context of 5G NR uplink incorporating also measured terminal power amplifier characteristics. The obtained results show that the proposed receiver system is able to clearly outperform classical linear receivers as well as existing ML receiver approaches, especially when the EVM is high in comparison with modulation order. The proposed ML receiver can thus facilitate pushing the terminal power amplifier (PA) systems deeper into saturation, and thereon improve the terminal power-efficiency, radiated power and network coverage.