 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKeshav Bimbraw
Simultaneous Estimation of Hand Configurations and Finger Joint Angles using Forearm Ultrasound
Nov 29, 2022
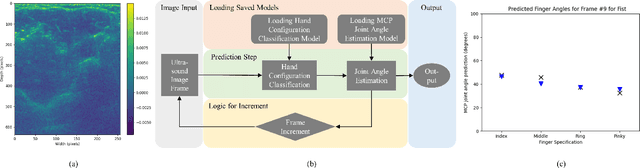
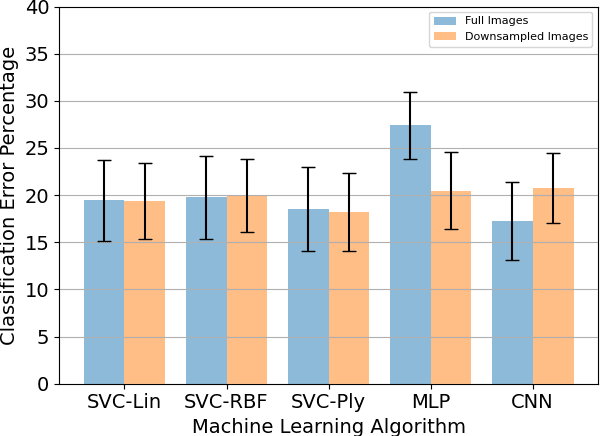
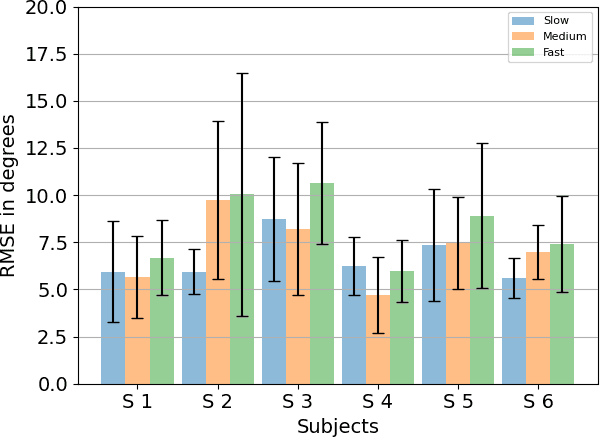
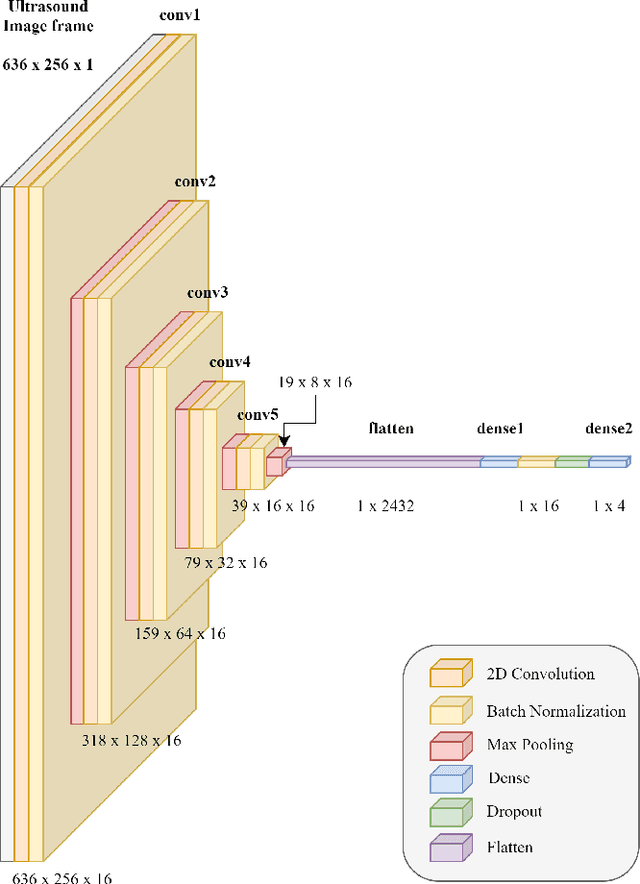
With the advancement in computing and robotics, it is necessary to develop fluent and intuitive methods for interacting with digital systems, augmented/virtual reality (AR/VR) interfaces, and physical robotic systems. Hand motion recognition is widely used to enable these interactions. Hand configuration classification and MCP joint angle detection is important for a comprehensive reconstruction of hand motion. sEMG and other technologies have been used for the detection of hand motions. Forearm ultrasound images provide a musculoskeletal visualization that can be used to understand hand motion. Recent work has shown that these ultrasound images can be classified using machine learning to estimate discrete hand configurations. Estimating both hand configuration and MCP joint angles based on forearm ultrasound has not been addressed in the literature. In this paper, we propose a CNN based deep learning pipeline for predicting the MCP joint angles. The results for the hand configuration classification were compared by using different machine learning algorithms. SVC with different kernels, MLP, and the proposed CNN have been used to classify the ultrasound images into 11 hand configurations based on activities of daily living. Forearm ultrasound images were acquired from 6 subjects instructed to move their hands according to predefined hand configurations. Motion capture data was acquired to get the finger angles corresponding to the hand movements at different speeds. Average classification accuracy of 82.7% for the proposed CNN and over 80% for SVC for different kernels was observed on a subset of the dataset. An average RMSE of 7.35 degrees was obtained between the predicted and the true MCP joint angles. A low latency (6.25 - 9.1 Hz) pipeline has been proposed for estimating both MCP joint angles and hand configuration aimed at real-time control of human-machine interfaces.
Prediction of Metacarpophalangeal joint angles and Classification of Hand configurations based on Ultrasound Imaging of the Forearm
Sep 26, 2021

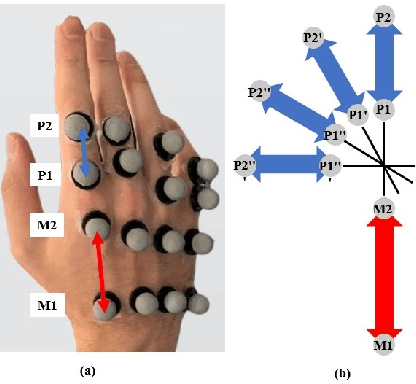
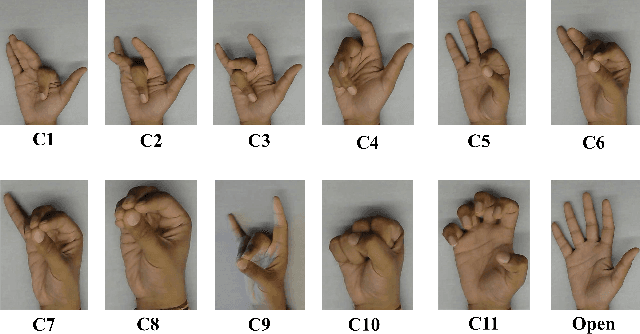
With the advancement in computing and robotics, it is necessary to develop fluent and intuitive methods for interacting with digital systems, AR/VR interfaces, and physical robotic systems. Hand movement recognition is widely used to enable this interaction. Hand configuration classification and Metacarpophalangeal (MCP) joint angle detection are important for a comprehensive reconstruction of the hand motion. Surface electromyography and other technologies have been used for the detection of hand motions. Ultrasound images of the forearm offer a way to visualize the internal physiology of the hand from a musculoskeletal perspective. Recent work has shown that these images can be classified using machine learning to predict various hand configurations. In this paper, we propose a Convolutional Neural Network (CNN) based deep learning pipeline for predicting the MCP joint angles. We supplement our results by using a Support Vector Classifier (SVC) to classify the ultrasound information into several predefined hand configurations based on activities of daily living (ADL). Ultrasound data from the forearm was obtained from 6 subjects who were instructed to move their hands according to predefined hand configurations relevant to ADLs. Motion capture data was acquired as the ground truth for hand movements at different speeds (0.5 Hz, 1 Hz, & 2 Hz) for the index, middle, ring, and pinky fingers. We were able to get promising SVC classification results on a subset of our collected data set. We demonstrated a correspondence between the predicted MCP joint angles and the actual MCP joint angles for the fingers, with an average root mean square error of 7.35 degrees. We implemented a low latency (6.25 - 9.1 Hz) pipeline for the prediction of both MCP joint angles and hand configuration estimation aimed at real-time control of digital devices, AR/VR interfaces, and physical robots.
Tele-operative Robotic Lung Ultrasound Scanning Platform for Triage of COVID-19 Patients
Nov 12, 2020
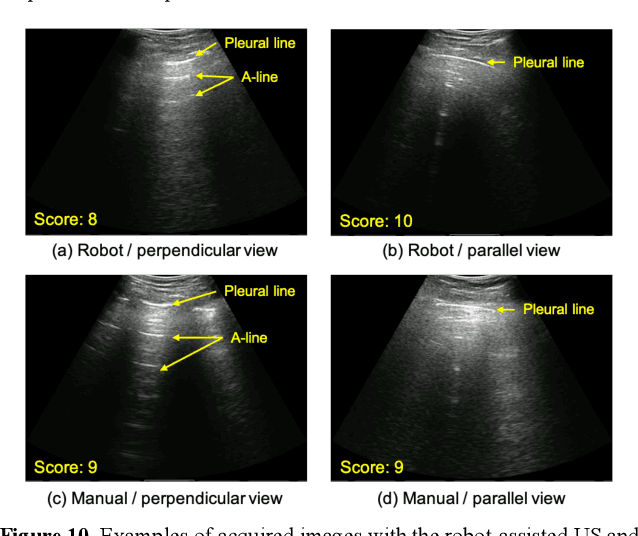

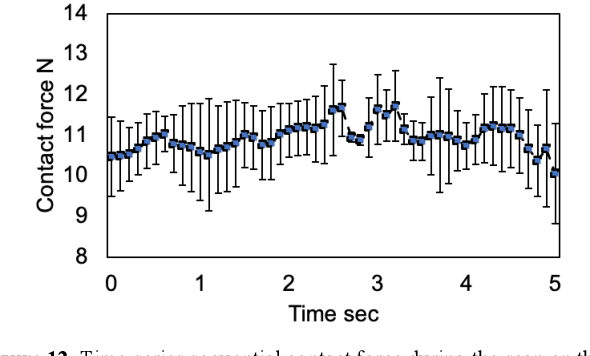
Novel severe acute respiratory syndrome coronavirus 2 (SARS-CoV-2) has become a pandemic of epic proportions and a global response to prepare health systems worldwide is of utmost importance. In addition to its cost-effectiveness in a resources-limited setting, lung ultrasound (LUS) has emerged as a rapid noninvasive imaging tool for the diagnosis of COVID-19 infected patients. Concerns surrounding LUS include the disparity of infected patients and healthcare providers, relatively small number of physicians and sonographers capable of performing LUS, and most importantly, the requirement for substantial physical contact between the patient and operator, increasing the risk of transmission. Mitigation of the spread of the virus is of paramount importance. A 2-dimensional (2D) tele-operative robotic platform capable of performing LUS in for COVID-19 infected patients may be of significant benefit. The authors address the aforementioned issues surrounding the use of LUS in the application of COVID- 19 infected patients. In addition, first time application, feasibility and safety were validated in three healthy subjects, along with 2D image optimization and comparison for overall accuracy. Preliminary results demonstrate that the proposed platform allows for successful acquisition and application of LUS in humans.