 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKonrad Simon
Elasticity-based Matching by Minimizing the Symmetric Difference of Shapes
Oct 15, 2015
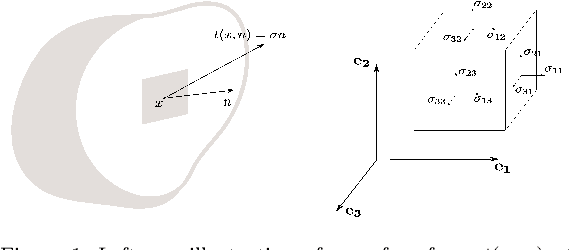
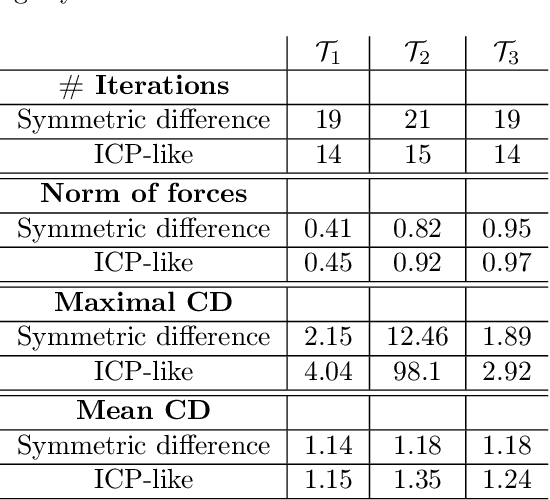
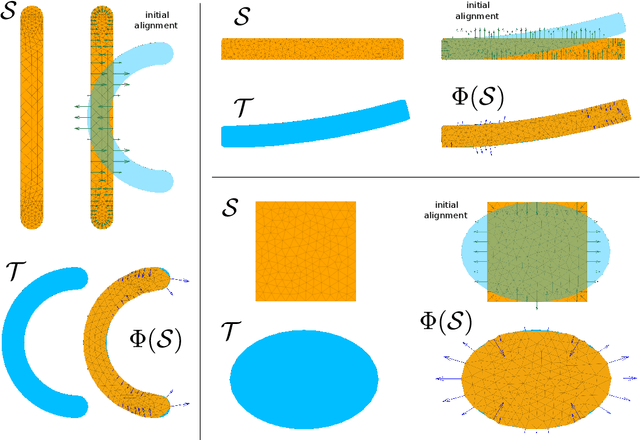
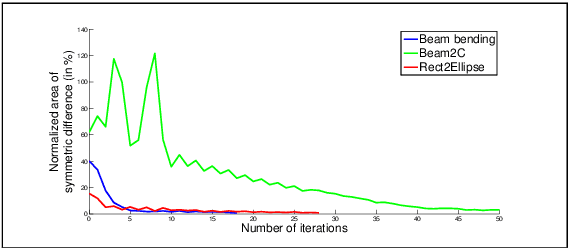
We consider the problem of matching two shapes assuming these shapes are related by an elastic deformation. Using linearized elasticity theory and the finite element method we seek an elastic deformation that is caused by simple external boundary forces and accounts for the difference between the two shapes. Our main contribution is in proposing a cost function and an optimization procedure to minimize the symmetric difference between the deformed and the target shapes as an alternative to point matches that guide the matching in other techniques. We show how to approximate the nonlinear optimization problem by a sequence of convex problems. We demonstrate the utility of our method in experiments and compare it to an ICP-like matching algorithm.
A Hyperelastic Two-Scale Optimization Model for Shape Matching
Jul 28, 2015

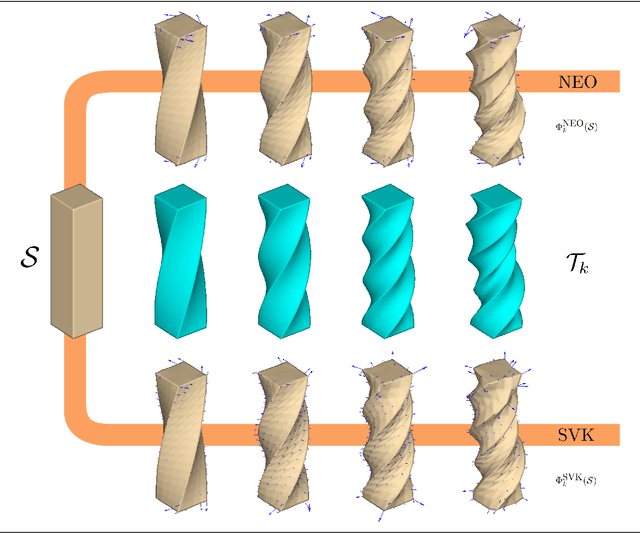
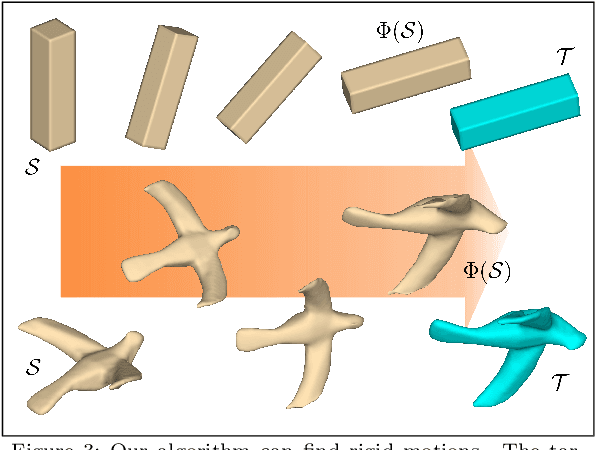
We suggest a novel shape matching algorithm for three-dimensional surface meshes of disk or sphere topology. The method is based on the physical theory of nonlinear elasticity and can hence handle large rotations and deformations. Deformation boundary conditions that supplement the underlying equations are usually unknown. Given an initial guess, these are optimized such that the mechanical boundary forces that are responsible for the deformation are of a simple nature. We show a heuristic way to approximate the nonlinear optimization problem by a sequence of convex problems using finite elements. The deformation cost, i.e, the forces, is measured on a coarse scale while ICP-like matching is done on the fine scale. We demonstrate the plausibility of our algorithm on examples taken from different datasets.