 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLi Ning
LAC-Nav: Collision-Free Mutiagent Navigation Based on The Local Action Cells
Nov 12, 2019
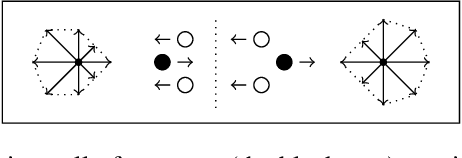
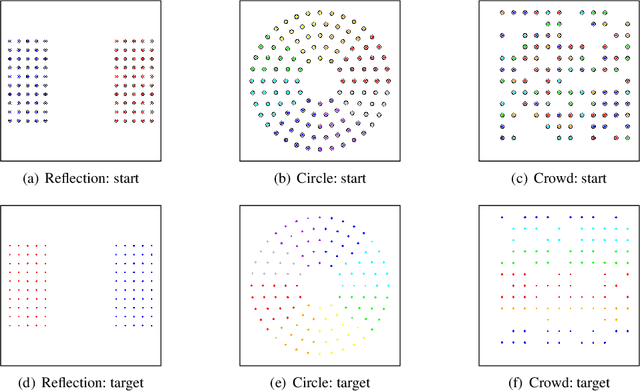
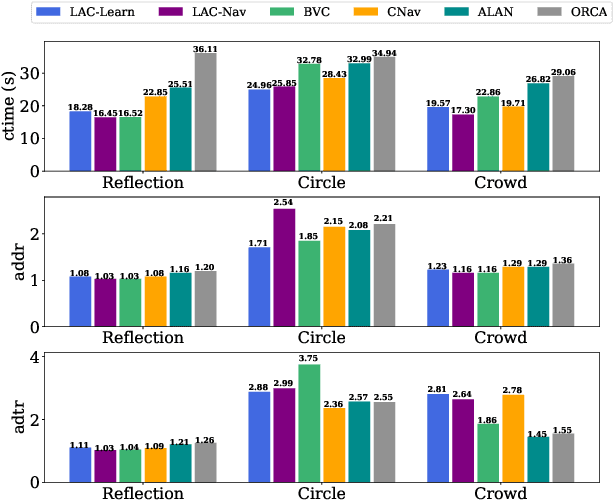
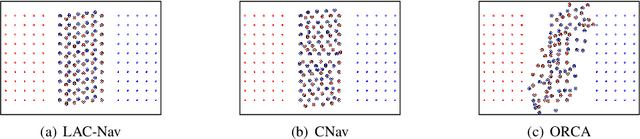
Collision avoidance is one of the most primary requirement in the decentralized multiagent navigations: while the agents are moving towards their own targets, attentions should be paid to avoid the collisions with the others. In this paper, we introduce the concept of local action cell, which provides for each agent a set of velocities that are safe to perform. Based on the realtime updated local action cells, we propose the LAC-Nav approach to navigate the agent with the properly selected velocity; and furthermore, we coupled the local action cell with an adaptive learning framework, in which the effect of selections are evaluated and used as the references for making decisions in the following updates. Through the experiments for three commonly considered scenarios, we demonstrated the efficiency of the proposed approaches, with the comparison to several widely studied strategies.
PyramNet: Point Cloud Pyramid Attention Network and Graph Embedding Module for Classification and Segmentation
Jun 07, 2019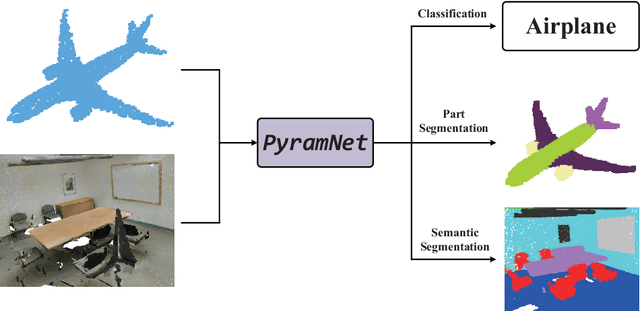
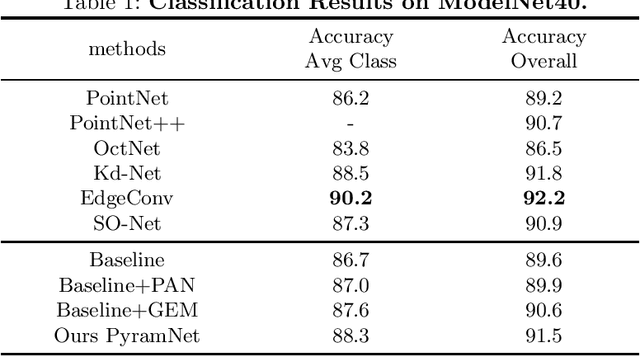
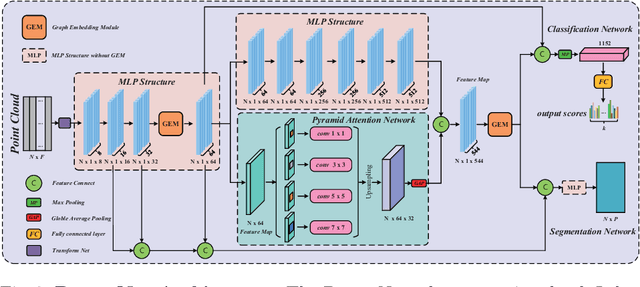
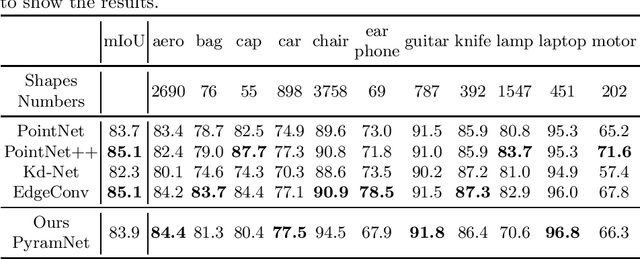
With the tide of artificial intelligence, we try to apply deep learning to understand 3D data. Point cloud is an important 3D data structure, which can accurately and directly reflect the real world. In this paper, we propose a simple and effective network, which is named PyramNet, suites for point cloud object classification and semantic segmentation in 3D scene. We design two new operators: Graph Embedding Module(GEM) and Pyramid Attention Network(PAN). Specifically, GEM projects point cloud onto the graph and practices the covariance matrix to explore the relationship between points, so as to improve the local feature expression ability of the model. PAN assigns some strong semantic features to each point to retain fine geometric features as much as possible. Furthermore, we provide extensive evaluation and analysis for the effectiveness of PyramNet. Empirically, we evaluate our model on ModelNet40, ShapeNet and S3DIS.