 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiangpeng Zhang
Relief R-CNN : Utilizing Convolutional Features for Fast Object Detection
Apr 26, 2017
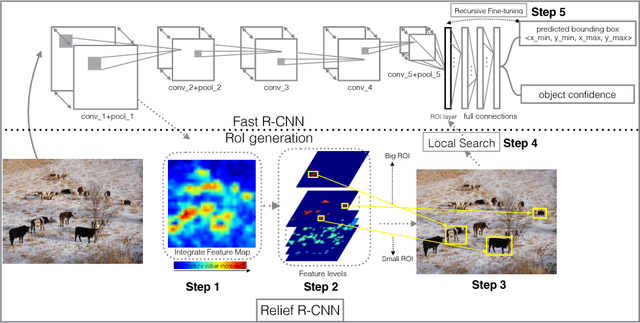
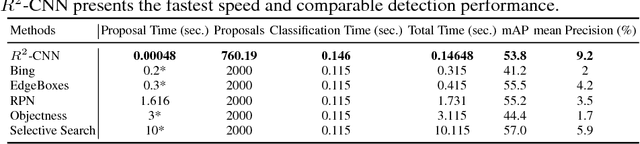
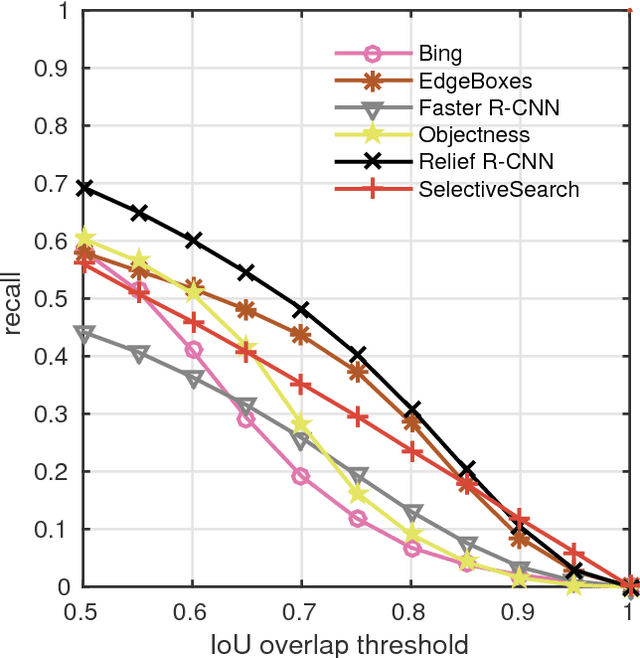
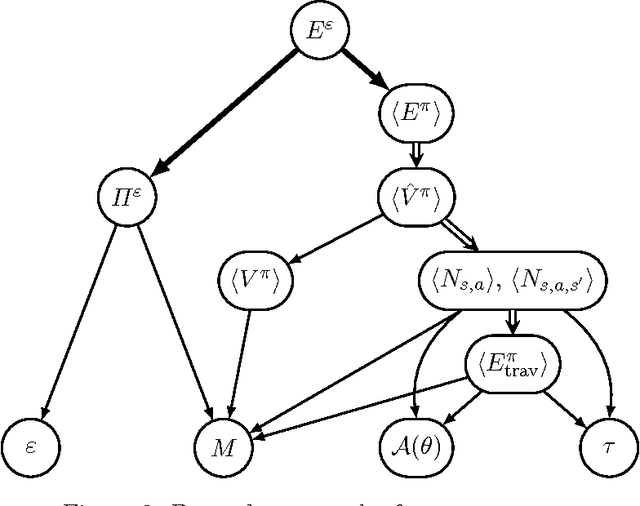
R-CNN style methods are sorts of the state-of-the-art object detection methods, which consist of region proposal generation and deep CNN classification. However, the proposal generation phase in this paradigm is usually time consuming, which would slow down the whole detection time in testing. This paper suggests that the value discrepancies among features in deep convolutional feature maps contain plenty of useful spatial information, and proposes a simple approach to extract the information for fast region proposal generation in testing. The proposed method, namely Relief R-CNN (R2-CNN), adopts a novel region proposal generator in a trained R-CNN style model. The new generator directly generates proposals from convolutional features by some simple rules, thus resulting in a much faster proposal generation speed and a lower demand of computation resources. Empirical studies show that R2-CNN could achieve the fastest detection speed with comparable accuracy among all the compared algorithms in testing.
Success Probability of Exploration: a Concrete Analysis of Learning Efficiency
Dec 02, 2016
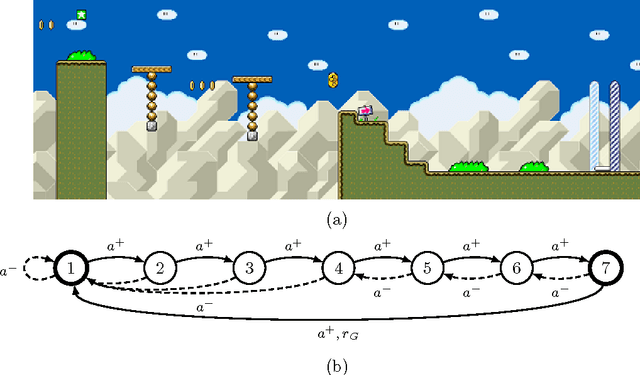
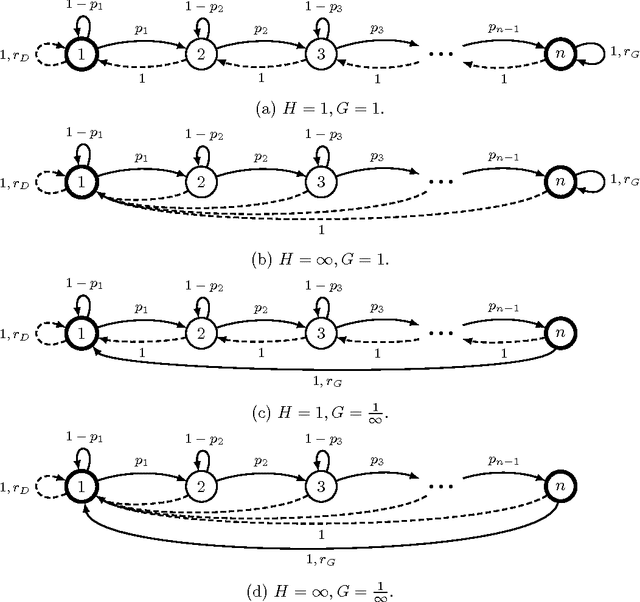
Exploration has been a crucial part of reinforcement learning, yet several important questions concerning exploration efficiency are still not answered satisfactorily by existing analytical frameworks. These questions include exploration parameter setting, situation analysis, and hardness of MDPs, all of which are unavoidable for practitioners. To bridge the gap between the theory and practice, we propose a new analytical framework called the success probability of exploration. We show that those important questions of exploration above can all be answered under our framework, and the answers provided by our framework meet the needs of practitioners better than the existing ones. More importantly, we introduce a concrete and practical approach to evaluating the success probabilities in certain MDPs without the need of actually running the learning algorithm. We then provide empirical results to verify our approach, and demonstrate how the success probability of exploration can be used to analyse and predict the behaviours and possible outcomes of exploration, which are the keys to the answer of the important questions of exploration.