 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLingxi Li
Social Force Embedded Mixed Graph Convolutional Network for Multi-class Trajectory Prediction
Apr 20, 2024
Accurate prediction of agent motion trajectories is crucial for autonomous driving, contributing to the reduction of collision risks in human-vehicle interactions and ensuring ample response time for other traffic participants. Current research predominantly focuses on traditional deep learning methods, including convolutional neural networks (CNNs) and recurrent neural networks (RNNs). These methods leverage relative distances to forecast the motion trajectories of a single class of agents. However, in complex traffic scenarios, the motion patterns of various types of traffic participants exhibit inherent randomness and uncertainty. Relying solely on relative distances may not adequately capture the nuanced interaction patterns between different classes of road users. In this paper, we propose a novel multi-class trajectory prediction method named the social force embedded mixed graph convolutional network (SFEM-GCN). SFEM-GCN comprises three graph topologies: the semantic graph (SG), position graph (PG), and velocity graph (VG). These graphs encode various of social force relationships among different classes of agents in complex scenes. Specifically, SG utilizes one-hot encoding of agent-class information to guide the construction of graph adjacency matrices based on semantic information. PG and VG create adjacency matrices to capture motion interaction relationships between different classes agents. These graph structures are then integrated into a mixed graph, where learning is conducted using a spatiotemporal graph convolutional neural network (ST-GCNN). To further enhance prediction performance, we adopt temporal convolutional networks (TCNs) to generate the predicted trajectory with fewer parameters. Experimental results on publicly available datasets demonstrate that SFEM-GCN surpasses state-of-the-art methods in terms of accuracy and robustness.
PaniniQA: Enhancing Patient Education Through Interactive Question Answering
Aug 21, 2023



Patient portal allows discharged patients to access their personalized discharge instructions in electronic health records (EHRs). However, many patients have difficulty understanding or memorizing their discharge instructions. In this paper, we present PaniniQA, a patient-centric interactive question answering system designed to help patients understand their discharge instructions. PaniniQA first identifies important clinical content from patients' discharge instructions and then formulates patient-specific educational questions. In addition, PaniniQA is also equipped with answer verification functionality to provide timely feedback to correct patients' misunderstandings. Our comprehensive automatic and human evaluation results demonstrate our PaniniQA is capable of improving patients' mastery of their medical instructions through effective interactions
FusionPlanner: A Multi-task Motion Planner for Mining Trucks using Multi-sensor Fusion Method
Aug 14, 2023



In recent years, significant achievements have been made in motion planning for intelligent vehicles. However, as a typical unstructured environment, open-pit mining attracts limited attention due to its complex operational conditions and adverse environmental factors. A comprehensive paradigm for unmanned transportation in open-pit mines is proposed in this research, including a simulation platform, a testing benchmark, and a trustworthy and robust motion planner. \textcolor{red}{Firstly, we propose a multi-task motion planning algorithm, called FusionPlanner, for autonomous mining trucks by the Multi-sensor fusion method to adapt both lateral and longitudinal control tasks for unmanned transportation. Then, we develop a novel benchmark called MiningNav, which offers three validation approaches to evaluate the trustworthiness and robustness of well-trained algorithms in transportation roads of open-pit mines. Finally, we introduce the Parallel Mining Simulator (PMS), a new high-fidelity simulator specifically designed for open-pit mining scenarios. PMS enables the users to manage and control open-pit mine transportation from both the single-truck control and multi-truck scheduling perspectives.} \textcolor{red}{The performance of FusionPlanner is tested by MiningNav in PMS, and the empirical results demonstrate a significant reduction in the number of collisions and takeovers of our planner. We anticipate our unmanned transportation paradigm will bring mining trucks one step closer to trustworthiness and robustness in continuous round-the-clock unmanned transportation.
Motion Planning for Autonomous Driving: The State of the Art and Future Perspectives
Mar 29, 2023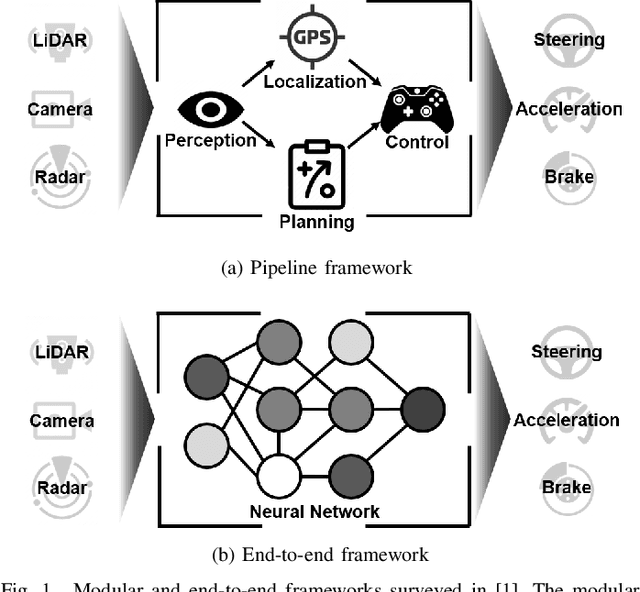
Thanks to the augmented convenience, safety advantages, and potential commercial value, Intelligent vehicles (IVs) have attracted wide attention throughout the world. Although a few autonomous driving unicorns assert that IVs will be commercially deployable by 2025, their implementation is still restricted to small-scale validation due to various issues, among which precise computation of control commands or trajectories by planning methods remains a prerequisite for IVs. This paper aims to review state-of-the-art planning methods, including pipeline planning and end-to-end planning methods. In terms of pipeline methods, a survey of selecting algorithms is provided along with a discussion of the expansion and optimization mechanisms, whereas in end-to-end methods, the training approaches and verification scenarios of driving tasks are points of concern. Experimental platforms are reviewed to facilitate readers in selecting suitable training and validation methods. Finally, the current challenges and future directions are discussed. The side-by-side comparison presented in this survey not only helps to gain insights into the strengths and limitations of the reviewed methods but also assists with system-level design choices.
Point Cloud Classification Using Content-based Transformer via Clustering in Feature Space
Mar 08, 2023



Recently, there have been some attempts of Transformer in 3D point cloud classification. In order to reduce computations, most existing methods focus on local spatial attention, but ignore their content and fail to establish relationships between distant but relevant points. To overcome the limitation of local spatial attention, we propose a point content-based Transformer architecture, called PointConT for short. It exploits the locality of points in the feature space (content-based), which clusters the sampled points with similar features into the same class and computes the self-attention within each class, thus enabling an effective trade-off between capturing long-range dependencies and computational complexity. We further introduce an Inception feature aggregator for point cloud classification, which uses parallel structures to aggregate high-frequency and low-frequency information in each branch separately. Extensive experiments show that our PointConT model achieves a remarkable performance on point cloud shape classification. Especially, our method exhibits 90.3% Top-1 accuracy on the hardest setting of ScanObjectNN. Source code of this paper is available at https://github.com/yahuiliu99/PointConT.
Risk assessment and mitigation of e-scooter crashes with naturalistic driving data
Dec 24, 2022



Recently, e-scooter-involved crashes have increased significantly but little information is available about the behaviors of on-road e-scooter riders. Most existing e-scooter crash research was based on retrospectively descriptive media reports, emergency room patient records, and crash reports. This paper presents a naturalistic driving study with a focus on e-scooter and vehicle encounters. The goal is to quantitatively measure the behaviors of e-scooter riders in different encounters to help facilitate crash scenario modeling, baseline behavior modeling, and the potential future development of in-vehicle mitigation algorithms. The data was collected using an instrumented vehicle and an e-scooter rider wearable system, respectively. A three-step data analysis process is developed. First, semi-automatic data labeling extracts e-scooter rider images and non-rider human images in similar environments to train an e-scooter-rider classifier. Then, a multi-step scene reconstruction pipeline generates vehicle and e-scooter trajectories in all encounters. The final step is to model e-scooter rider behaviors and e-scooter-vehicle encounter scenarios. A total of 500 vehicle to e-scooter interactions are analyzed. The variables pertaining to the same are also discussed in this paper.
A Wearable Data Collection System for Studying Micro-Level E-Scooter Behavior in Naturalistic Road Environment
Dec 22, 2022



As one of the most popular micro-mobility options, e-scooters are spreading in hundreds of big cities and college towns in the US and worldwide. In the meantime, e-scooters are also posing new challenges to traffic safety. In general, e-scooters are suggested to be ridden in bike lanes/sidewalks or share the road with cars at the maximum speed of about 15-20 mph, which is more flexible and much faster than the pedestrains and bicyclists. These features make e-scooters challenging for human drivers, pedestrians, vehicle active safety modules, and self-driving modules to see and interact. To study this new mobility option and address e-scooter riders' and other road users' safety concerns, this paper proposes a wearable data collection system for investigating the micro-level e-Scooter motion behavior in a Naturalistic road environment. An e-Scooter-based data acquisition system has been developed by integrating LiDAR, cameras, and GPS using the robot operating system (ROS). Software frameworks are developed to support hardware interfaces, sensor operation, sensor synchronization, and data saving. The integrated system can collect data continuously for hours, meeting all the requirements including calibration accuracy and capability of collecting the vehicle and e-Scooter encountering data.
SceNDD: A Scenario-based Naturalistic Driving Dataset
Dec 22, 2022



In this paper, we propose SceNDD: a scenario-based naturalistic driving dataset that is built upon data collected from an instrumented vehicle in downtown Indianapolis. The data collection was completed in 68 driving sessions with different drivers, where each session lasted about 20--40 minutes. The main goal of creating this dataset is to provide the research community with real driving scenarios that have diverse trajectories and driving behaviors. The dataset contains ego-vehicle's waypoints, velocity, yaw angle, as well as non-ego actor's waypoints, velocity, yaw angle, entry-time, and exit-time. Certain flexibility is provided to users so that actors, sensors, lanes, roads, and obstacles can be added to the existing scenarios. We used a Joint Probabilistic Data Association (JPDA) tracker to detect non-ego vehicles on the road. We present some preliminary results of the proposed dataset and a few applications associated with it. The complete dataset is expected to be released by early 2023.