 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-Fei Li
Improved Algorithm for Adversarial Linear Mixture MDPs with Bandit Feedback and Unknown Transition
Mar 07, 2024
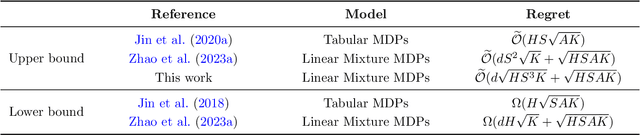
We study reinforcement learning with linear function approximation, unknown transition, and adversarial losses in the bandit feedback setting. Specifically, we focus on linear mixture MDPs whose transition kernel is a linear mixture model. We propose a new algorithm that attains an $\widetilde{O}(d\sqrt{HS^3K} + \sqrt{HSAK})$ regret with high probability, where $d$ is the dimension of feature mappings, $S$ is the size of state space, $A$ is the size of action space, $H$ is the episode length and $K$ is the number of episodes. Our result strictly improves the previous best-known $\widetilde{O}(dS^2 \sqrt{K} + \sqrt{HSAK})$ result in Zhao et al. (2023a) since $H \leq S$ holds by the layered MDP structure. Our advancements are primarily attributed to (i) a new least square estimator for the transition parameter that leverages the visit information of all states, as opposed to only one state in prior work, and (ii) a new self-normalized concentration tailored specifically to handle non-independent noises, originally proposed in the dynamic assortment area and firstly applied in reinforcement learning to handle correlations between different states.
Dynamic Regret of Online Markov Decision Processes
Aug 26, 2022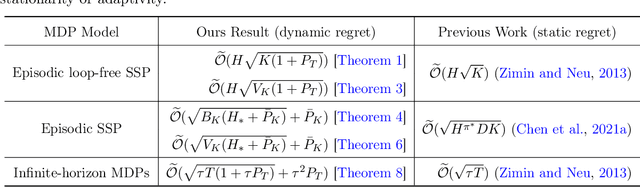
We investigate online Markov Decision Processes (MDPs) with adversarially changing loss functions and known transitions. We choose dynamic regret as the performance measure, defined as the performance difference between the learner and any sequence of feasible changing policies. The measure is strictly stronger than the standard static regret that benchmarks the learner's performance with a fixed compared policy. We consider three foundational models of online MDPs, including episodic loop-free Stochastic Shortest Path (SSP), episodic SSP, and infinite-horizon MDPs. For these three models, we propose novel online ensemble algorithms and establish their dynamic regret guarantees respectively, in which the results for episodic (loop-free) SSP are provably minimax optimal in terms of time horizon and certain non-stationarity measure. Furthermore, when the online environments encountered by the learner are predictable, we design improved algorithms and achieve better dynamic regret bounds for the episodic (loop-free) SSP; and moreover, we demonstrate impossibility results for the infinite-horizon MDPs.