 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLouis Dressel
Using Neural Networks to Generate Information Maps for Mobile Sensors
Sep 26, 2018
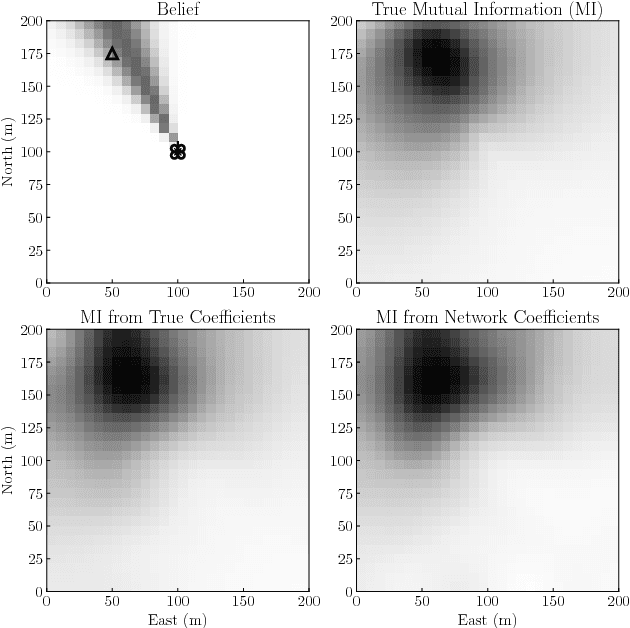
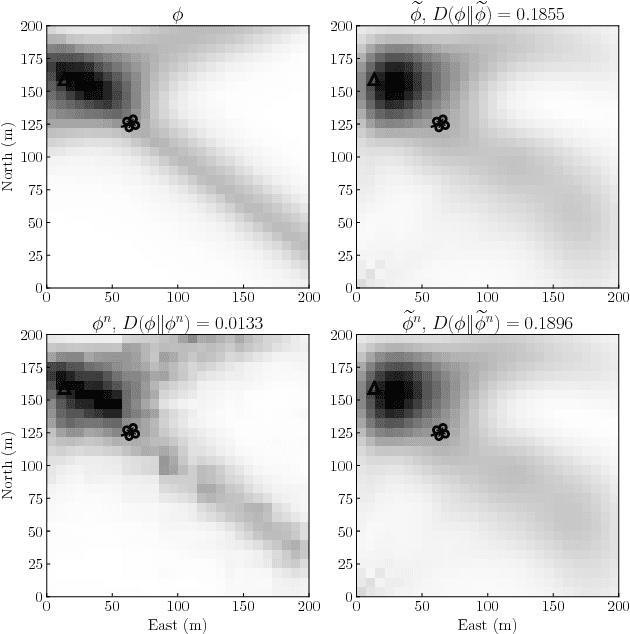
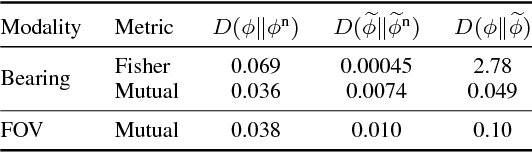
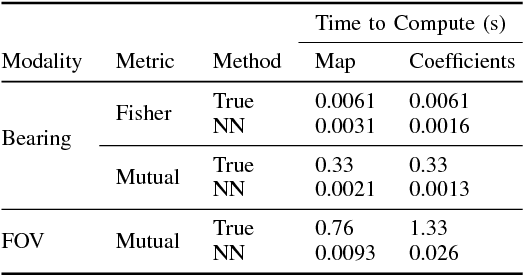
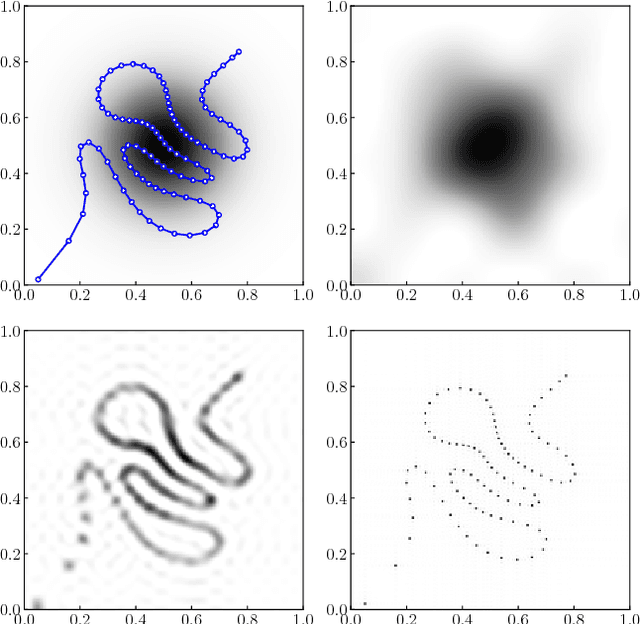
Target localization is a critical task for mobile sensors and has many applications. However, generating informative trajectories for these sensors is a challenging research problem. A common method uses information maps that estimate the value of taking measurements from any point in the sensor state space. These information maps are used to generate trajectories; for example, a trajectory might be designed so its distribution of measurements matches the distribution of the information map. Regardless of the trajectory generation method, generating information maps as new observations are made is critical. However, it can be challenging to compute these maps in real-time. We propose using convolutional neural networks to generate information maps from a target estimate and sensor model in real-time. Simulations show that maps are accurately rendered while offering orders of magnitude reduction in computation time.
On the Optimality of Ergodic Trajectories for Information Gathering Tasks
Aug 20, 2018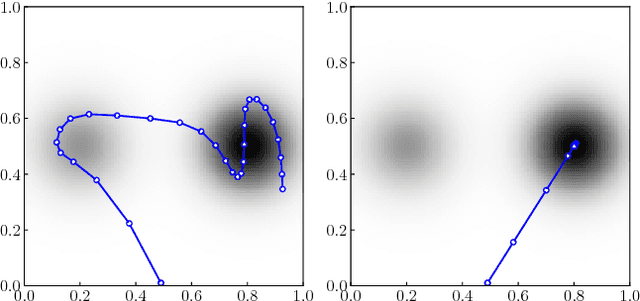
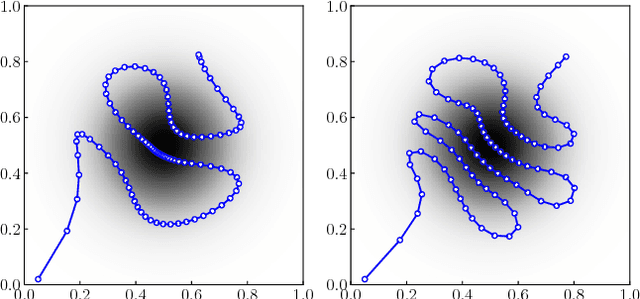
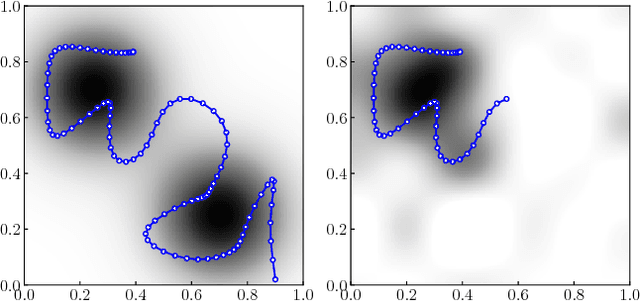
Recently, ergodic control has been suggested as a means to guide mobile sensors for information gathering tasks. In ergodic control, a mobile sensor follows a trajectory that is ergodic with respect to some information density distribution. A trajectory is ergodic if time spent in a state space region is proportional to the information density of the region. Although ergodic control has shown promising experimental results, there is little understanding of why it works or when it is optimal. In this paper, we study a problem class under which optimal information gathering trajectories are ergodic. This class relies on a submodularity assumption for repeated measurements from the same state. It is assumed that information available in a region decays linearly with time spent there. This assumption informs selection of the horizon used in ergodic trajectory generation. We support our claims with a set of experiments that demonstrate the link between ergodicity, optimal information gathering, and submodularity.
Efficient and Low-cost Localization of Radio Signals with a Multirotor UAV
Aug 13, 2018
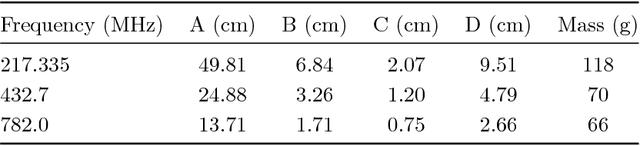
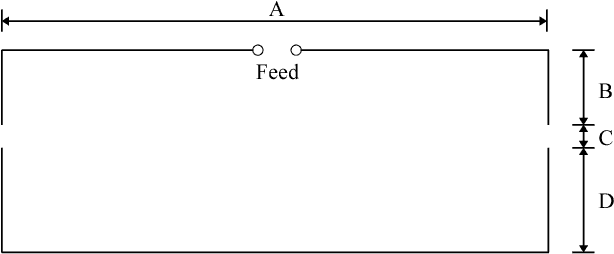
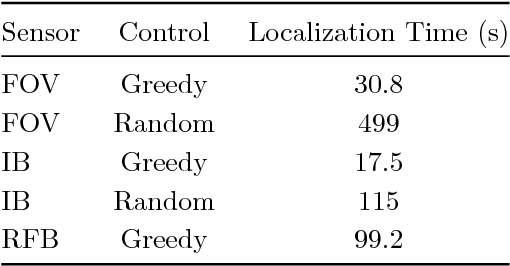
Localizing radio frequency (RF) sources with an unmanned aerial vehicle (UAV) has many important applications. As a result, UAV-based localization has been the focus of much research. However, previous approaches rely heavily on custom electronics and specialized knowledge, are not robust and require extensive calibration, or are inefficient with measurements and waste energy on a battery-constrained platform. In this work, we present a system based on a multirotor UAV that addresses these shortcomings. Our system measures signal strength received by two antennas to update a probability distribution over possible transmitter locations. An information-theoretic controller is used to direct the UAV's search. Signal strength is measured with low-cost, commercial-off-the-shelf components. We demonstrate our system using three transmitters: a continuous signal in the UHF band, a wildlife collar pulsing in the VHF band, and a cell phone making a voice call over LTE. Our system significantly outperforms previous methods, localizing the RF source in the same time it takes previous methods to make a single measurement.