 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMansur Arief
Enhancing Visual Perception in Novel Environments via Incremental Data Augmentation Based on Style Transfer
Sep 16, 2023
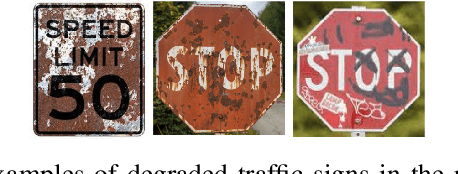
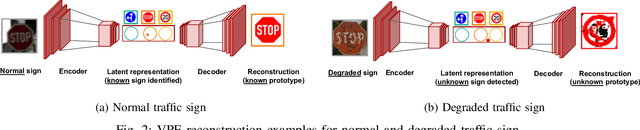
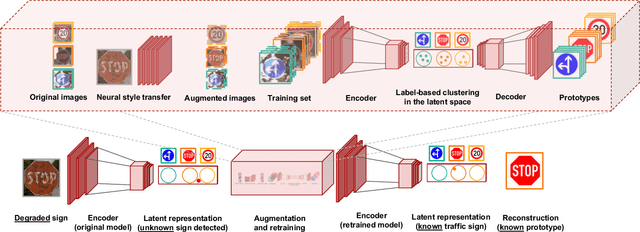
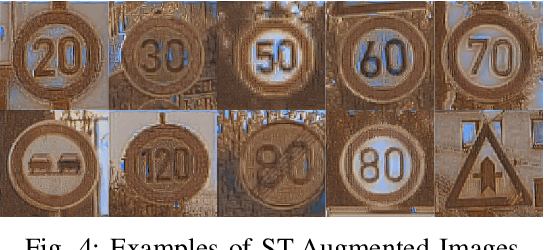
The deployment of autonomous agents in real-world scenarios is challenged by "unknown unknowns", i.e. novel unexpected environments not encountered during training, such as degraded signs. While existing research focuses on anomaly detection and class imbalance, it often fails to address truly novel scenarios. Our approach enhances visual perception by leveraging the Variational Prototyping Encoder (VPE) to adeptly identify and handle novel inputs, then incrementally augmenting data using neural style transfer to enrich underrepresented data. By comparing models trained solely on original datasets with those trained on a combination of original and augmented datasets, we observed a notable improvement in the performance of the latter. This underscores the critical role of data augmentation in enhancing model robustness. Our findings suggest the potential benefits of incorporating generative models for domain-specific augmentation strategies.
Test Against High-Dimensional Uncertainties: Accelerated Evaluation of Autonomous Vehicles with Deep Importance Sampling
Apr 06, 2022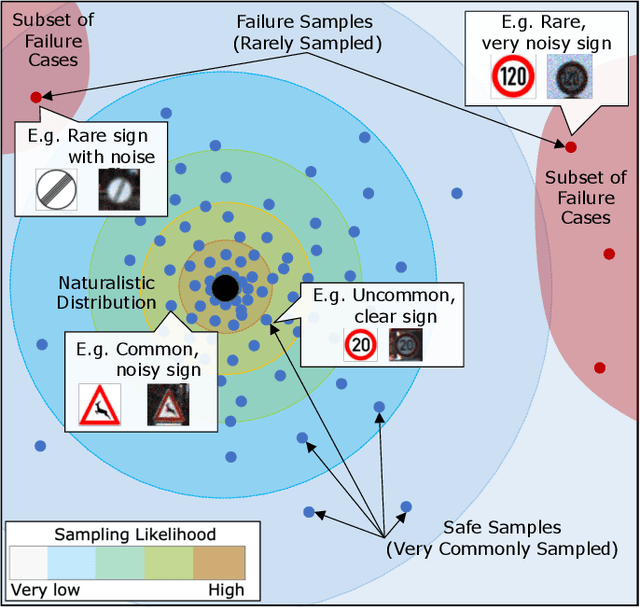


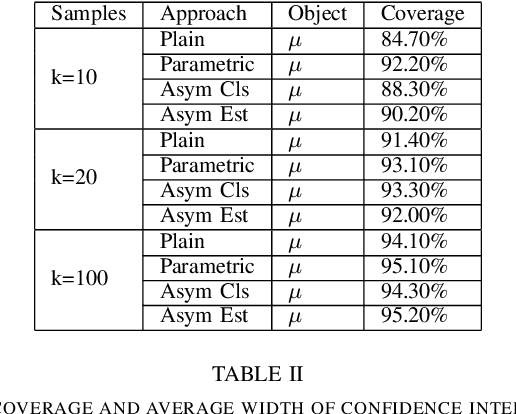
Evaluating the performance of autonomous vehicles (AV) and their complex subsystems to high precision under naturalistic circumstances remains a challenge, especially when failure or dangerous cases are rare. Rarity does not only require an enormous sample size for a naive method to achieve high confidence estimation, but it also causes dangerous underestimation of the true failure rate and it is extremely hard to detect. Meanwhile, the state-of-the-art approach that comes with a correctness guarantee can only compute an upper bound for the failure rate under certain conditions, which could limit its practical uses. In this work, we present Deep Importance Sampling (Deep IS) framework that utilizes a deep neural network to obtain an efficient IS that is on par with the state-of-the-art, capable of reducing the required sample size 43 times smaller than the naive sampling method to achieve 10% relative error and while producing an estimate that is much less conservative. Our high-dimensional experiment estimating the misclassification rate of one of the state-of-the-art traffic sign classifiers further reveals that this efficiency still holds true even when the target is very small, achieving over 600 times efficiency boost. This highlights the potential of Deep IS in providing a precise estimate even against high-dimensional uncertainties.
Certifiable Deep Importance Sampling for Rare-Event Simulation of Black-Box Systems
Nov 03, 2021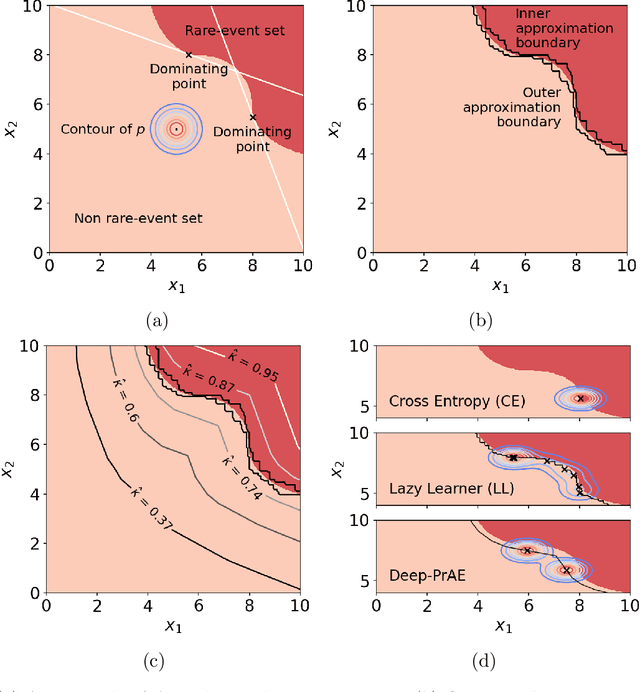
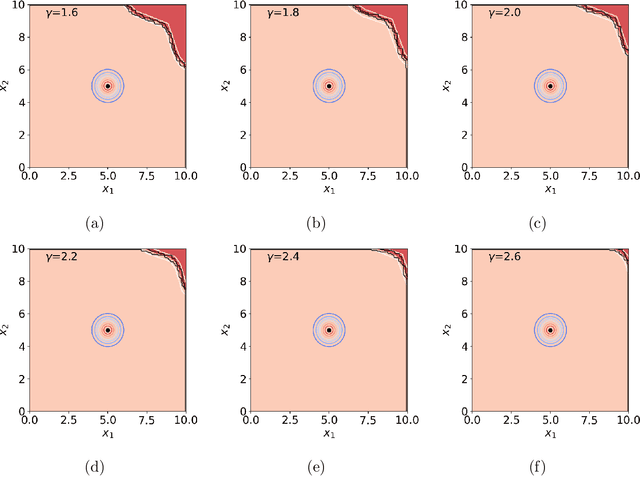
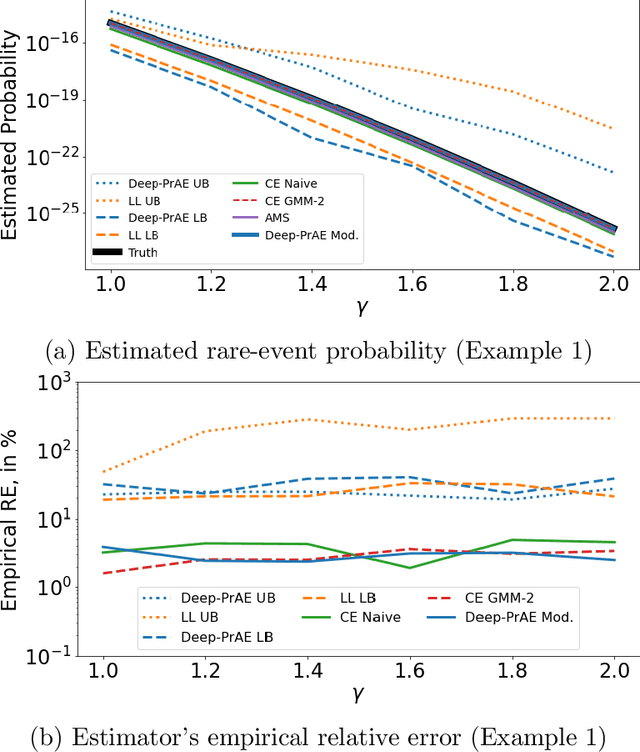
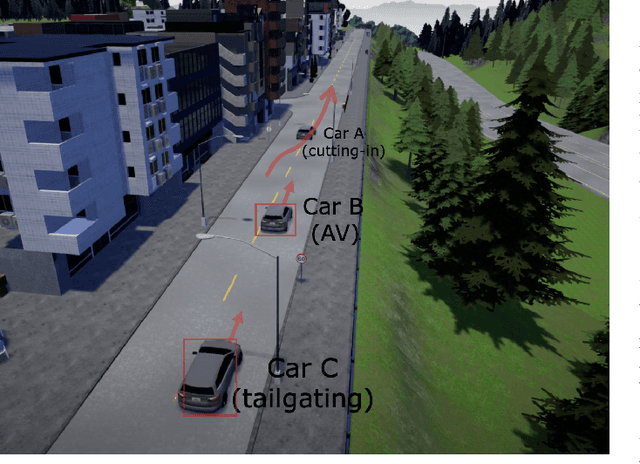
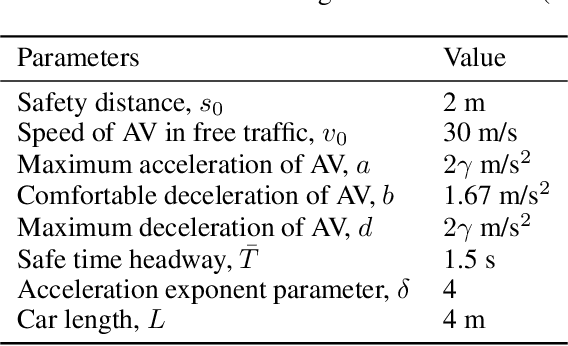
Rare-event simulation techniques, such as importance sampling (IS), constitute powerful tools to speed up challenging estimation of rare catastrophic events. These techniques often leverage the knowledge and analysis on underlying system structures to endow desirable efficiency guarantees. However, black-box problems, especially those arising from recent safety-critical applications of AI-driven physical systems, can fundamentally undermine their efficiency guarantees and lead to dangerous under-estimation without diagnostically detected. We propose a framework called Deep Probabilistic Accelerated Evaluation (Deep-PrAE) to design statistically guaranteed IS, by converting black-box samplers that are versatile but could lack guarantees, into one with what we call a relaxed efficiency certificate that allows accurate estimation of bounds on the rare-event probability. We present the theory of Deep-PrAE that combines the dominating point concept with rare-event set learning via deep neural network classifiers, and demonstrate its effectiveness in numerical examples including the safety-testing of intelligent driving algorithms.
Deep Probabilistic Accelerated Evaluation: A Certifiable Rare-Event Simulation Methodology for Black-Box Autonomy
Jul 01, 2020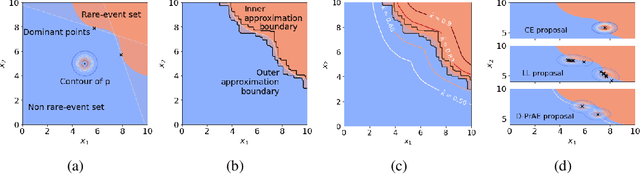
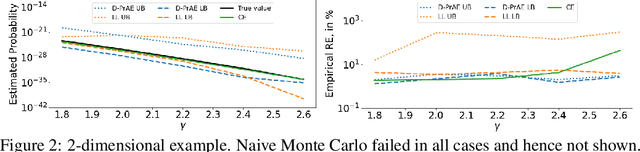
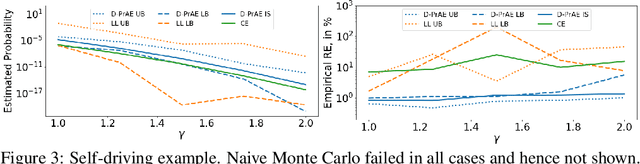
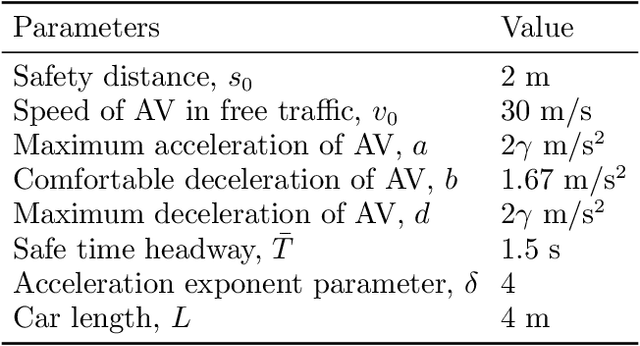
Evaluating the reliability of intelligent physical systems against rare catastrophic events poses a huge testing burden for real-world applications. Simulation provides a useful, if not unique, platform to evaluate the extremal risks of these AI-enabled systems before their deployments. Importance Sampling (IS), while proven to be powerful for rare-event simulation, faces challenges in handling these systems due to their black-box nature that fundamentally undermines its efficiency guarantee. To overcome this challenge, we propose a framework called Deep Probabilistic Accelerated Evaluation (D-PrAE) to design IS, which leverages rare-event-set learning and a new notion of efficiency certificate. D-PrAE combines the dominating point method with deep neural network classifiers to achieve superior estimation efficiency. We present theoretical guarantees and demonstrate the empirical effectiveness of D-PrAE via examples on the safety-testing of self-driving algorithms that are beyond the reach of classical variance reduction techniques.
How to Evaluate Proving Grounds for Self-Driving? A Quantitative Approach
Sep 24, 2019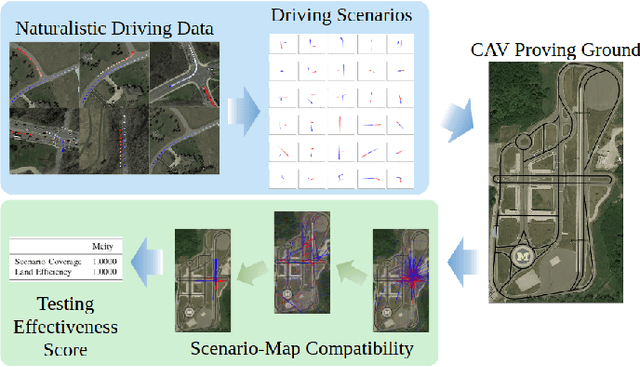

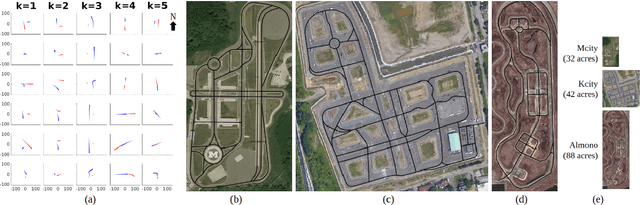
Proving ground has been a critical component in testing and validation for Connected and Automated Vehicles (CAV). Although quite a few world-class testing facilities have been under construction over the years, the evaluation of proving grounds themselves as testing approaches has rarely been studied. In this paper, we investigate the effectiveness of CAV proving grounds by its capability to recreate real-world traffic scenarios. We extract typical use cases from naturalistic driving events leveraging non-parametric Bayesian learning techniques. Then, we contribute to a generative sample-based optimization approach to assess the compatibility between traffic scenarios and proving ground road structure. We evaluate the effectiveness of our approach with three CAV testing facilities: Mcity, Almono (Uber ATG), and Kcity. Experiments show that our approach is effective in evaluating the capability of a given CAV proving ground to accommodate real-world driving scenarios.
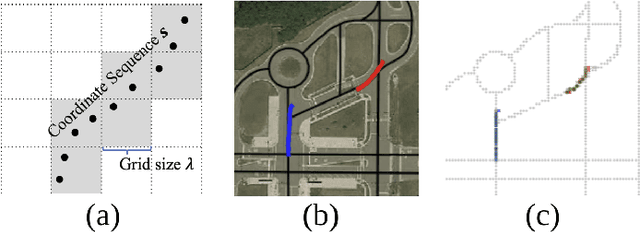
Modeling Multi-Vehicle Interaction Scenarios Using Gaussian Random Field
Jun 25, 2019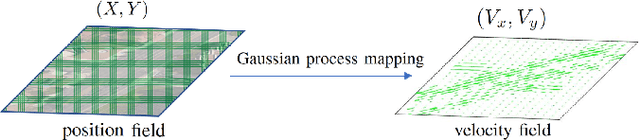
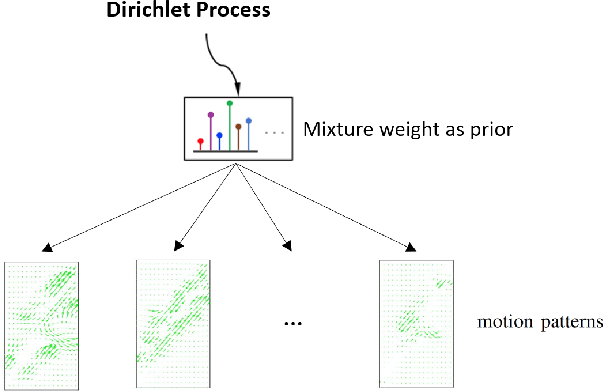
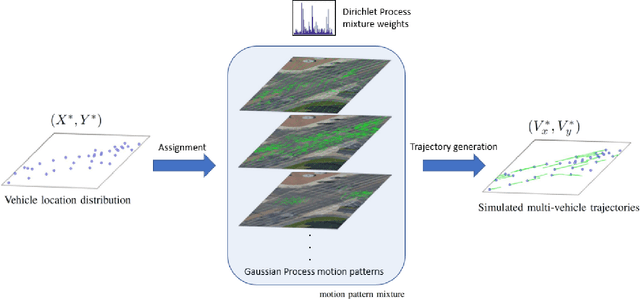
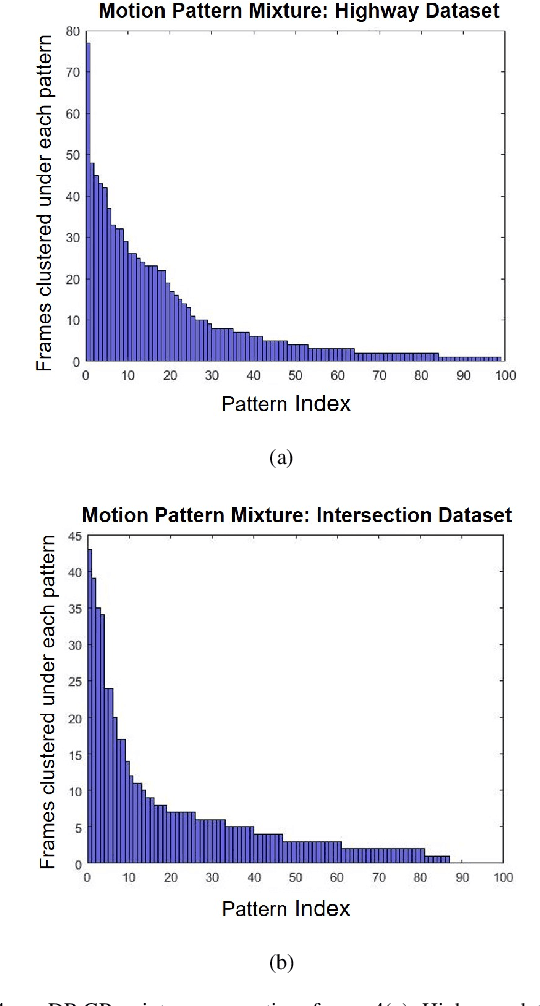
Autonomous vehicles (AV) are expected to navigate in complex traffic scenarios with multiple surrounding vehicles. The correlations between road users vary over time, the degree of which, in theory, could be infinitely large, and thus posing a great challenge in modeling and predicting the driving environment. In this research, we propose a method to reproduce such high-dimensional scenarios in a finitely tractable form by defining a stochastic vector field model in multi-vehicle interactions. We then apply non-parametric Bayesian learning to extract the underlying motion patterns from a large quantity of naturalistic traffic data. We use Gaussian process to model multi-vehicle motion, and Dirichlet process to assign each observation to a specific scenario. We implement the proposed method on NGSim highway and intersection data sets, in which complex multi-vehicle interactions are prevalent. The results show that the proposed method is capable of capturing motion patterns from both settings, without imposing heroic prior, hence can be applied for a wide array of traffic situations. The proposed modeling can enable simulation platforms and other testing methods designed for AV evaluation, to easily model and generate traffic scenarios emulating large scale driving data.
Assessing Modeling Variability in Autonomous Vehicle Accelerated Evaluation
Apr 19, 2019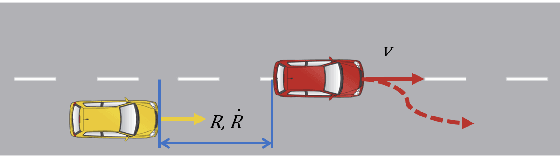
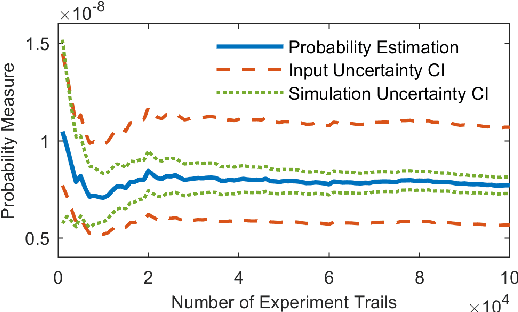
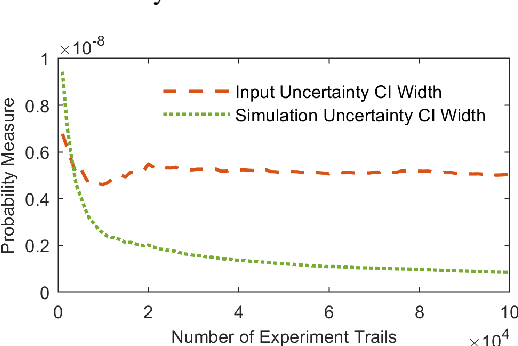
Safety evaluation of autonomous vehicles is extensively studied recently, one line of studies considers Monte Carlo based evaluation. The Monte Carlo based evaluation usually estimates the probability of safety-critical events as a safety measurement based on Monte Carlo samples. These Monte Carlo samples are generated from a stochastic model that is constructed based on real-world data. In this paper, we propose an approach to assess the potential estimation error in the evaluation procedure caused by data variability. The proposed method merges the classical bootstrap method for estimating input uncertainty with a likelihood ratio based scheme to reuse experiment results. The proposed approach is highly economical and efficient in terms of implementation costs in assessing input uncertainty for autonomous vehicle evaluation.
Where Should We Place LiDARs on the Autonomous Vehicle? - An Optimal Design Approach
Apr 07, 2019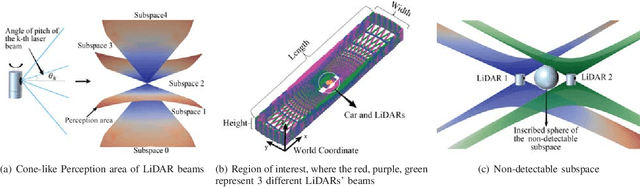
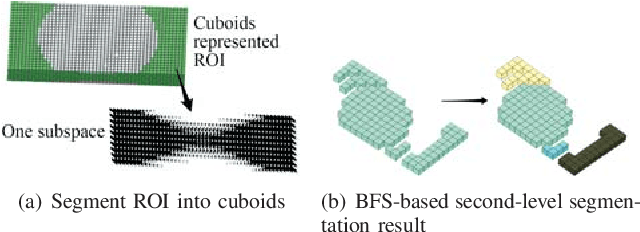
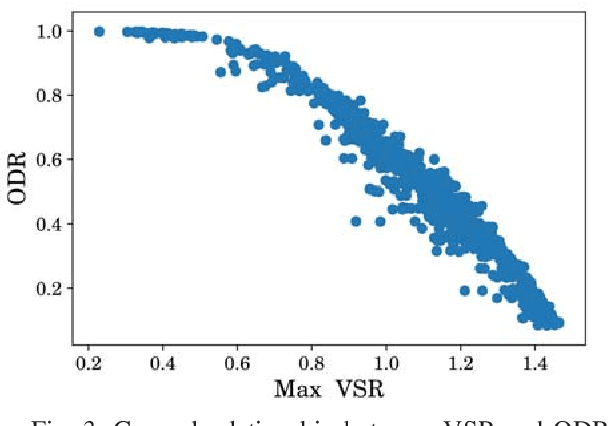
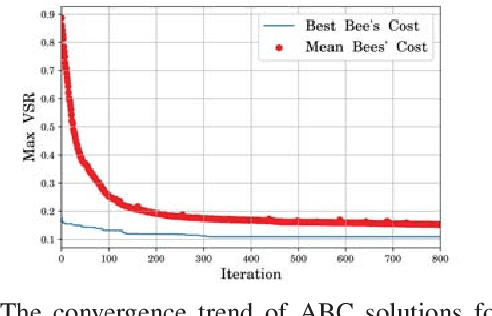
Autonomous vehicle manufacturers recognize that LiDAR provides accurate 3D views and precise distance measures under highly uncertain driving conditions. Its practical implementation, however, remains costly. This paper investigates the optimal LiDAR configuration problem to achieve utility maximization. We use the perception area and non-detectable subspace to construct the design procedure as solving a min-max optimization problem and propose a bio-inspired measure -- volume to surface area ratio (VSR) -- as an easy-to-evaluate cost function representing the notion of the size of the non-detectable subspaces of a given configuration. We then adopt a cuboid-based approach to show that the proposed VSR-based measure is a well-suited proxy for object detection rate. It is found that the Artificial Bee Colony evolutionary algorithm yields a tractable cost function computation. Our experiments highlight the effectiveness of our proposed VSR measure in terms of cost-effectiveness configuration as well as providing insightful analyses that can improve the design of AV systems.
An Accelerated Approach to Safely and Efficiently Test Pre-Production Autonomous Vehicles on Public Streets
Sep 09, 2018

Various automobile and mobility companies, for instance Ford, Uber and Waymo, are currently testing their pre-produced autonomous vehicle (AV) fleets on the public roads. However, due to rareness of the safety-critical cases and, effectively, unlimited number of possible traffic scenarios, these on-road testing efforts have been acknowledged as tedious, costly, and risky. In this study, we propose Accelerated De- ployment framework to safely and efficiently estimate the AVs performance on public streets. We showed that by appropriately addressing the gradual accuracy improvement and adaptively selecting meaningful and safe environment under which the AV is deployed, the proposed framework yield to highly accurate estimation with much faster evaluation time, and more importantly, lower deployment risk. Our findings provide an answer to the currently heated and active discussions on how to properly test AV performance on public roads so as to achieve safe, efficient, and statistically-reliable testing framework for AV technologies.
An "Xcity" Optimization Approach to Designing Proving Grounds for Connected and Autonomous Vehicles
Aug 09, 2018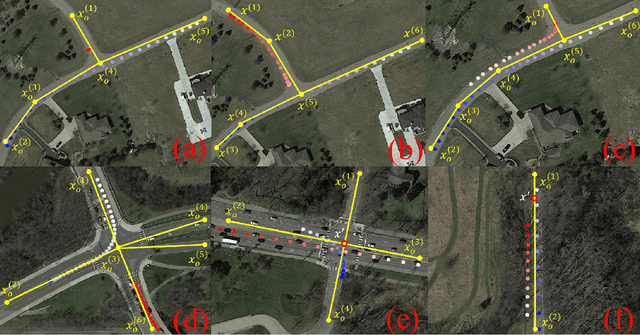
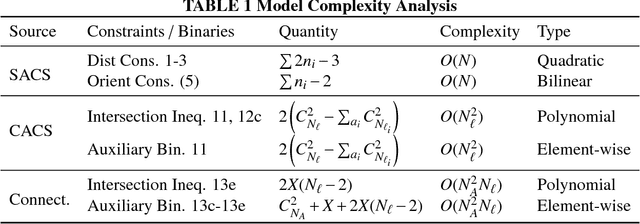

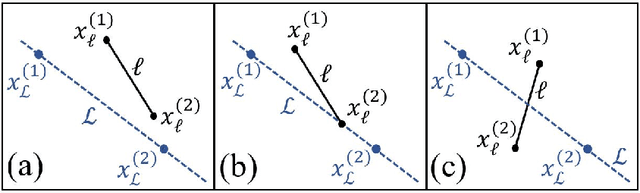
Proving ground, or on-track testing has been an essential part of testing and validation process for connected and autonomous vehicles (CAV). Several world-class CAV proving grounds, such as Mcity at the University of Michigan and The Castle of Waymo, have already been built, and many more are currently under construction. In this paper, we propose the first optimization approach to CAV proving ground designing and refer to any such CAV-centric design problem as "Xcity" to emphasize the enormous investment, the multi-dimensional spatial consideration, and the immense construction effort emerging globally. Inspired by the recent progress on traffic encounter clustering, we further define "road assets" as fundamental building blocks and formulate the whole design process into nonlinear optimization problems. We have shown that such framework can be utilized to adaptively generate CAV proving ground designs with optimized capability and flexibility and can further be extended to evaluate an existing "Xcity" design.