 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarika Ivanová
Maintaining Ad-Hoc Communication Network in Area Protection Scenarios with Adversarial Agents
Sep 04, 2017
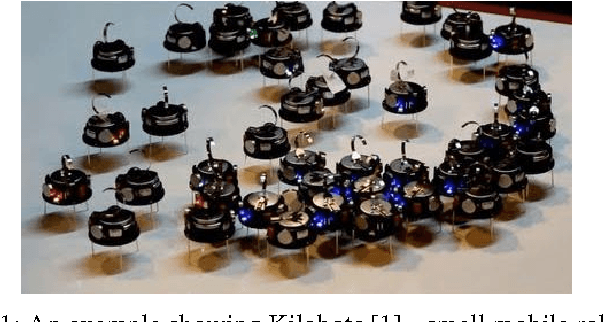
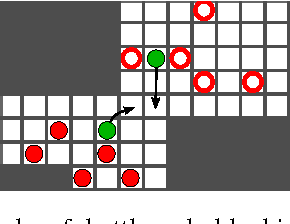
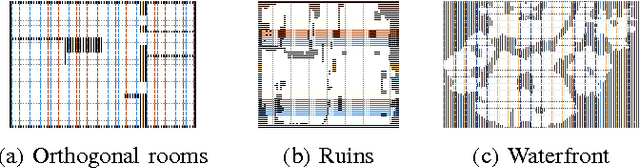
We address a problem of area protection in graph-based scenarios with multiple mobile agents where connectivity is maintained among agents to ensure they can communicate. The problem consists of two adversarial teams of agents that move in an undirected graph shared by both teams. Agents are placed in vertices of the graph; at most one agent can occupy a vertex; and they can move into adjacent vertices in a conflict free way. Teams have asymmetric goals: the aim of one team - attackers - is to invade into given area while the aim of the opponent team - defenders - is to protect the area from being entered by attackers by occupying selected vertices. The team of defenders need to maintain connectivity of vertices occupied by its own agents in a visibility graph. The visibility graph models possibility of communication between pairs of vertices. We study strategies for allocating vertices to be occupied by the team of defenders to block attacking agents where connectivity is maintained at the same time. To do this we reserve a subset of defending agents that do not try to block the attackers but instead are placed to support connectivity of the team. The performance of strategies is tested in multiple benchmarks. The success of a strategy is heavily dependent on the type of the instance, and so one of the contributions of this work is that we identify suitable strategies for diverse instance types.
Area Protection in Adversarial Path-Finding Scenarios with Multiple Mobile Agents on Graphs: a theoretical and experimental study of target-allocation strategies for defense coordination
Aug 24, 2017
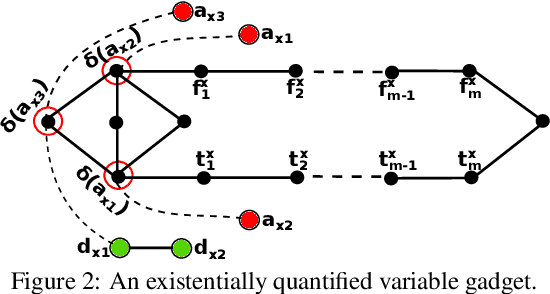
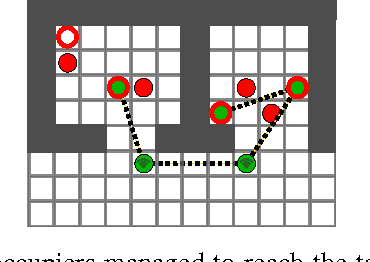
We address a problem of area protection in graph-based scenarios with multiple agents. The problem consists of two adversarial teams of agents that move in an undirected graph shared by both teams. Agents are placed in vertices of the graph; at most one agent can occupy a vertex; and they can move into adjacent vertices in a conflict free way. Teams have asymmetric goals: the aim of one team - attackers - is to invade into given area while the aim of the opponent team - defenders - is to protect the area from being entered by attackers by occupying selected vertices. We study strategies for allocating vertices to be occupied by the team of defenders to block attacking agents. We show that the decision version of the problem of area protection is PSPACE-hard under the assumption that agents can allocate their target vertices multiple times. Further we develop various on-line vertex-allocation strategies for the defender team in a simplified variant of the problem with single stage vertex allocation and evaluated their performance in multiple benchmarks. The success of a strategy is heavily dependent on the type of the instance, and so one of the contributions of this work is that we identify suitable vertex-allocation strategies for diverse instance types. In particular, we introduce a simulation-based method that identifies and tries to capture bottlenecks in the graph, that are frequently used by the attackers. Our experimental evaluation suggests that this method often allows a successful defense even in instances where the attackers significantly outnumber the defenders.