 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMartin Vossiek
Automatic Spatial Calibration of Near-Field MIMO Radar With Respect to Optical Sensors
Mar 16, 2024
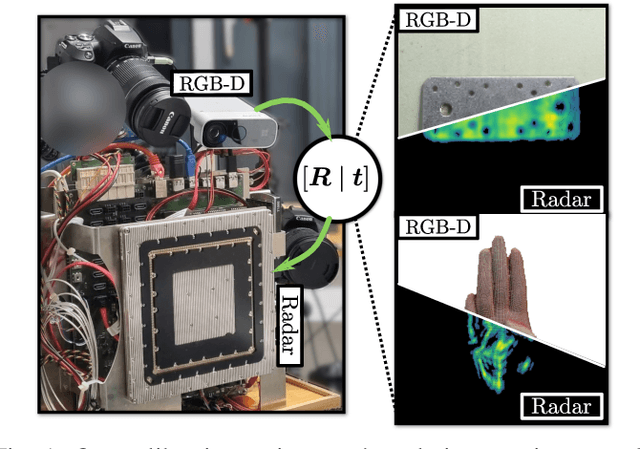
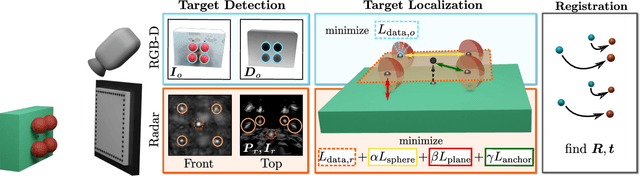
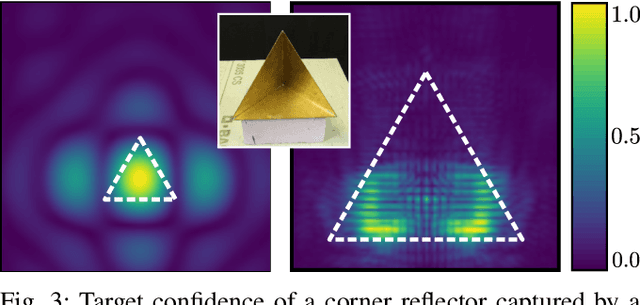
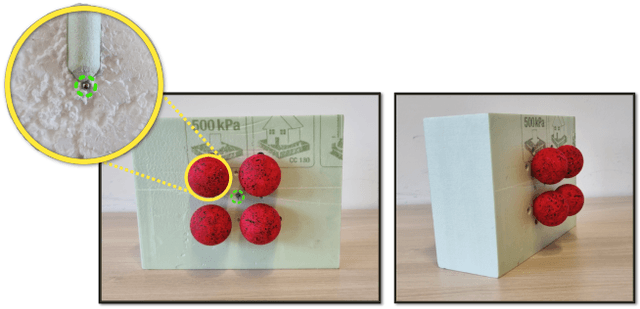
Despite an emerging interest in MIMO radar, the utilization of its complementary strengths in combination with optical sensors has so far been limited to far-field applications, due to the challenges that arise from mutual sensor calibration in the near field. In fact, most related approaches in the autonomous industry propose target-based calibration methods using corner reflectors that have proven to be unsuitable for the near field. In contrast, we propose a novel, joint calibration approach for optical RGB-D sensors and MIMO radars that is designed to operate in the radar's near-field range, within decimeters from the sensors. Our pipeline consists of a bespoke calibration target, allowing for automatic target detection and localization, followed by the spatial calibration of the two sensor coordinate systems through target registration. We validate our approach using two different depth sensing technologies from the optical domain. The experiments show the efficiency and accuracy of our calibration for various target displacements, as well as its robustness of our localization in terms of signal ambiguities.
Radar-Based Recognition of Static Hand Gestures in American Sign Language
Feb 20, 2024In the fast-paced field of human-computer interaction (HCI) and virtual reality (VR), automatic gesture recognition has become increasingly essential. This is particularly true for the recognition of hand signs, providing an intuitive way to effortlessly navigate and control VR and HCI applications. Considering increased privacy requirements, radar sensors emerge as a compelling alternative to cameras. They operate effectively in low-light conditions without capturing identifiable human details, thanks to their lower resolution and distinct wavelength compared to visible light. While previous works predominantly deploy radar sensors for dynamic hand gesture recognition based on Doppler information, our approach prioritizes classification using an imaging radar that operates on spatial information, e.g. image-like data. However, generating large training datasets required for neural networks (NN) is a time-consuming and challenging process, often falling short of covering all potential scenarios. Acknowledging these challenges, this study explores the efficacy of synthetic data generated by an advanced radar ray-tracing simulator. This simulator employs an intuitive material model that can be adjusted to introduce data diversity. Despite exclusively training the NN on synthetic data, it demonstrates promising performance when put to the test with real measurement data. This emphasizes the practicality of our methodology in overcoming data scarcity challenges and advancing the field of automatic gesture recognition in VR and HCI applications.
Joint Transmit Signal and Beamforming Design for Integrated Sensing and Power Transfer Systems
Nov 12, 2023Integrating different functionalities, conventionally implemented as dedicated systems, into a single platform allows utilising the available resources more efficiently. We consider an integrated sensing and power transfer (ISAPT) system and propose the joint optimisation of the rectangular pulse-shaped transmit signal and the beamforming vector to combine sensing and wireless power transfer (WPT) functionalities efficiently. In contrast to prior works, we adopt an accurate non-linear circuit-based energy harvesting (EH) model. We formulate and solve a non-convex optimisation problem for a general number of EH receivers to maximise a weighted sum of the average harvested powers at the EH receivers while ensuring the received echo signal reflected by a sensing target (ST) has sufficient power for estimating the range to the ST with a prescribed accuracy within the considered coverage region. The average harvested power is shown to monotonically increase with the pulse duration when the average transmit power budget is sufficiently large. We discuss the trade-off between sensing performance and power transfer for the considered ISAPT system. The proposed approach significantly outperforms a heuristic baseline scheme based on a linear EH model, which linearly combines energy beamforming with the beamsteering vector in the direction to the ST as its transmit strategy.
UAV Formation Optimization for Communication-assisted InSAR Sensing
Nov 12, 2023Interferometric synthetic aperture radar (InSAR) is an increasingly important remote sensing technique that enables three-dimensional (3D) sensing applications such as the generation of accurate digital elevation models (DEMs). In this paper, we investigate the joint formation and communication resource allocation optimization for a system comprising two unmanned aerial vehicles (UAVs) to perform InSAR sensing and to transfer the acquired data to the ground. To this end, we adopt as sensing performance metrics the interferometric coherence, i.e., the local correlation between the two co-registered UAV radar images, and the height of ambiguity (HoA), which together are a measure for the accuracy with which the InSAR system can estimate the height of ground objects. In addition, an analytical expression for the coverage of the considered InSAR sensing system is derived. Our objective is to maximize the InSAR coverage while satisfying all relevant InSAR-specific sensing and communication performance metrics. To tackle the non-convexity of the formulated optimization problem, we employ alternating optimization (AO) techniques combined with successive convex approximation (SCA). Our simulation results reveal that the resulting resource allocation algorithm outperforms two benchmark schemes in terms of InSAR coverage while satisfying all sensing and real-time communication requirements. Furthermore, we highlight the importance of efficient communication resource allocation in facilitating real-time sensing and unveil the trade-off between InSAR height estimation accuracy and coverage.
Concept for an Automatic Annotation of Automotive Radar Data Using AI-segmented Aerial Camera Images
Sep 01, 2023This paper presents an approach to automatically annotate automotive radar data with AI-segmented aerial camera images. For this, the images of an unmanned aerial vehicle (UAV) above a radar vehicle are panoptically segmented and mapped in the ground plane onto the radar images. The detected instances and segments in the camera image can then be applied directly as labels for the radar data. Owing to the advantageous bird's eye position, the UAV camera does not suffer from optical occlusion and is capable of creating annotations within the complete field of view of the radar. The effectiveness and scalability are demonstrated in measurements, where 589 pedestrians in the radar data were automatically labeled within 2 minutes.
A Realistic Radar Ray Tracing Simulator for Hand Pose Imaging
Jul 28, 2023With the increasing popularity of human-computer interaction applications, there is also growing interest in generating sufficiently large and diverse data sets for automatic radar-based recognition of hand poses and gestures. Radar simulations are a vital approach to generating training data (e.g., for machine learning). Therefore, this work applies a ray tracing method to radar imaging of the hand. The performance of the proposed simulation approach is verified by a comparison of simulation and measurement data based on an imaging radar with a high lateral resolution. In addition, the surface material model incorporated into the ray tracer is highlighted in more detail and parameterized for radar hand imaging. Measurements and simulations show a very high similarity between synthetic and real radar image captures. The presented results demonstrate that it is possible to generate very realistic simulations of radar measurement data even for complex radar hand pose imaging systems.
Super-Resolution Radar Imaging with Sparse Arrays Using a Deep Neural Network Trained with Enhanced Virtual Data
Jun 16, 2023



This paper introduces a method based on a deep neural network (DNN) that is perfectly capable of processing radar data from extremely thinned radar apertures. The proposed DNN processing can provide both aliasing-free radar imaging and super-resolution. The results are validated by measuring the detection performance on realistic simulation data and by evaluating the Point-Spread-function (PSF) and the target-separation performance on measured point-like targets. Also, a qualitative evaluation of a typical automotive scene is conducted. It is shown that this approach can outperform state-of-the-art subspace algorithms and also other existing machine learning solutions. The presented results suggest that machine learning approaches trained with sufficiently sophisticated virtual input data are a very promising alternative to compressed sensing and subspace approaches in radar signal processing. The key to this performance is that the DNN is trained using realistic simulation data that perfectly mimic a given sparse antenna radar array hardware as the input. As ground truth, ultra-high resolution data from an enhanced virtual radar are simulated. Contrary to other work, the DNN utilizes the complete radar cube and not only the antenna channel information at certain range-Doppler detections. After training, the proposed DNN is capable of sidelobe- and ambiguity-free imaging. It simultaneously delivers nearly the same resolution and image quality as would be achieved with a fully occupied array.
Implementation of Real-Time Automotive SAR Imaging
Jun 16, 2023



This paper presents measures to reduce the computation time of automotive synthetic aperture radar (SAR) imaging to achieve real-time capability. For this, the image formation, which is based on the Back-Projection algorithm, was thoroughly analyzed. Various optimizations were individually tested and analyzed on graphics processing units (GPU). Apart from the time reduction gained from these measures, the data size needed for processing was also drastically decreased. With a combination of all measures, a high-resolution SAR image of 30 m by 30 m that combines 8192 chirps can be reconstructed in less than 30 ms using a standard GPU. It is thus demonstrated that a real-time implementation of automotive SAR is possible.
Achieving Efficient and Realistic Full-Radar Simulations and Automatic Data Annotation by exploiting Ray Meta Data of a Radar Ray Tracing Simulator
May 23, 2023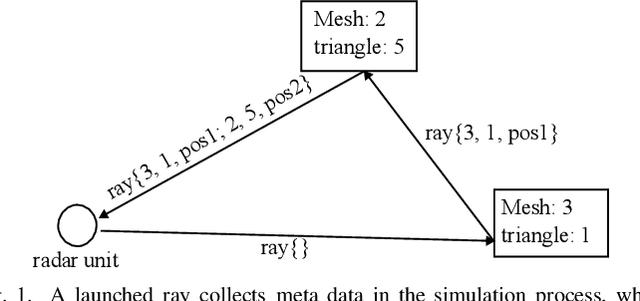
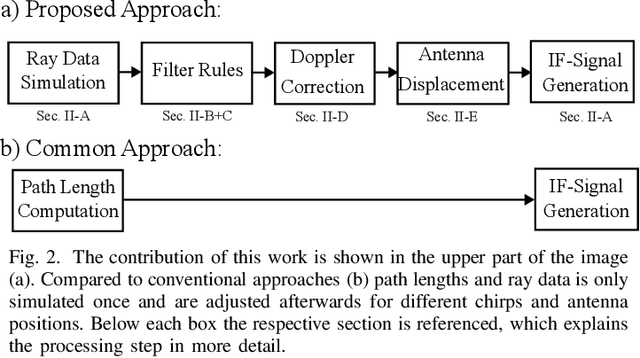
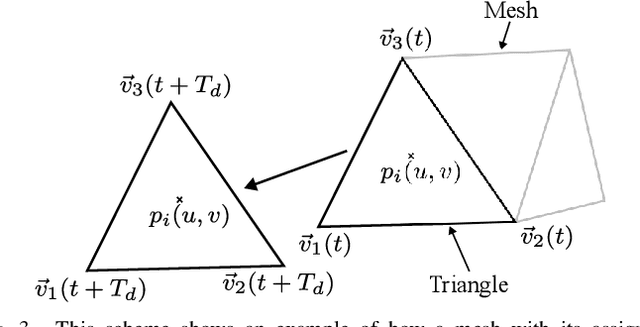
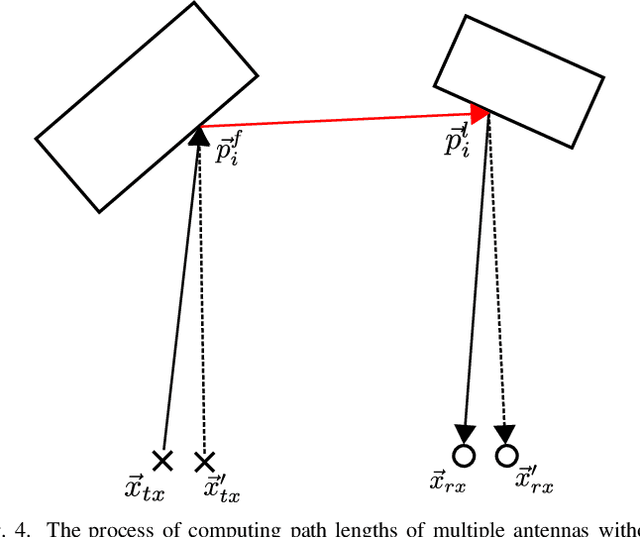
In this work a novel radar simulation concept is introduced that allows to simulate realistic radar data for Range, Doppler, and for arbitrary antenna positions in an efficient way. Further, it makes it possible to automatically annotate the simulated radar signal by allowing to decompose it into different parts. This approach allows not only almost perfect annotations possible, but also allows the annotation of exotic effects, such as multi-path effects or to label signal parts originating from different parts of an object. This is possible by adapting the computation process of a Monte Carlo shooting and bouncing rays (SBR) simulator. By considering the hits of each simulated ray, various meta data can be stored such as hit position, mesh pointer, object IDs, and many more. This collected meta data can then be utilized to predict the change of path lengths introduced by object motion to obtain Doppler information or to apply specific ray filter rules in order obtain radar signals that only fulfil specific conditions, such as multiple bounces or containing specific object IDs. Using this approach, perfect and otherwise almost impossible annotations schemes can be realized.
ShaRPy: Shape Reconstruction and Hand Pose Estimation from RGB-D with Uncertainty
Mar 17, 2023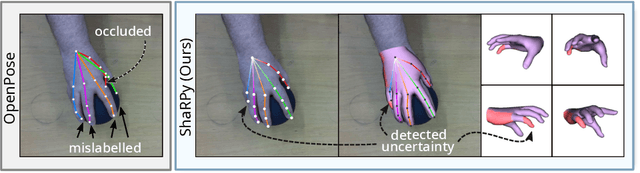
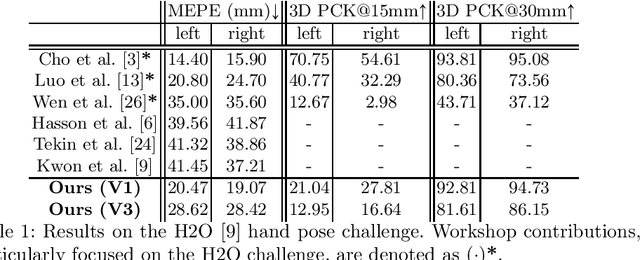
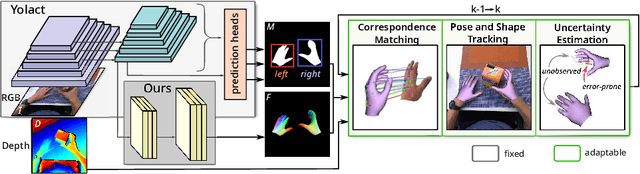

Despite their potential, markerless hand tracking technologies are not yet applied in practice to the diagnosis or monitoring of the activity in inflammatory musculoskeletal diseases. One reason is that the focus of most methods lies in the reconstruction of coarse, plausible poses for gesture recognition or AR/VR applications, whereas in the clinical context, accurate, interpretable, and reliable results are required. Therefore, we propose ShaRPy, the first RGB-D Shape Reconstruction and hand Pose tracking system, which provides uncertainty estimates of the computed pose to guide clinical decision-making. Our method requires only a light-weight setup with a single consumer-level RGB-D camera yet it is able to distinguish similar poses with only small joint angle deviations. This is achieved by combining a data-driven dense correspondence predictor with traditional energy minimization, optimizing for both, pose and hand shape parameters. We evaluate ShaRPy on a keypoint detection benchmark and show qualitative results on recordings of a patient.