 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMichael Posa
Simultaneous Learning of Contact and Continuous Dynamics
Oct 18, 2023
Robotic manipulation can greatly benefit from the data efficiency, robustness, and predictability of model-based methods if robots can quickly generate models of novel objects they encounter. This is especially difficult when effects like complex joint friction lack clear first-principles models and are usually ignored by physics simulators. Further, numerically-stiff contact dynamics can make common model-building approaches struggle. We propose a method to simultaneously learn contact and continuous dynamics of a novel, possibly multi-link object by observing its motion through contact-rich trajectories. We formulate a system identification process with a loss that infers unmeasured contact forces, penalizing their violation of physical constraints and laws of motion given current model parameters. Our loss is unlike prediction-based losses used in differentiable simulation. Using a new dataset of real articulated object trajectories and an existing cube toss dataset, our method outperforms differentiable simulation and end-to-end alternatives with more data efficiency. See our project page for code, datasets, and media: https://sites.google.com/view/continuous-contact-nets/home
Adaptive Contact-Implicit Model Predictive Control with Online Residual Learning
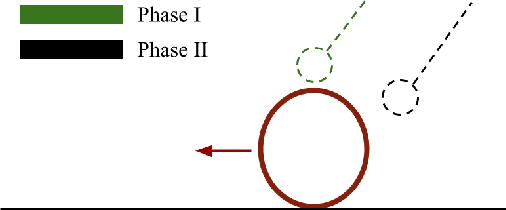
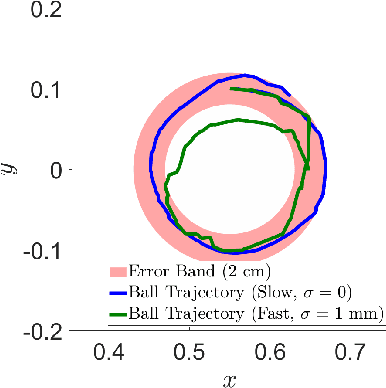
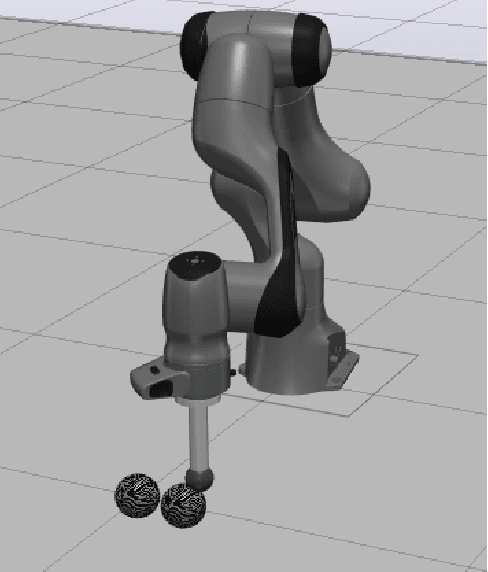
Oct 15, 2023The hybrid nature of multi-contact robotic systems, due to making and breaking contact with the environment, creates significant challenges for high-quality control. Existing model-based methods typically rely on either good prior knowledge of the multi-contact model or require significant offline model tuning effort, thus resulting in low adaptability and robustness. In this paper, we propose a real-time adaptive multi-contact model predictive control framework, which enables online adaption of the hybrid multi-contact model and continuous improvement of the control performance for contact-rich tasks. This framework includes an adaption module, which continuously learns a residual of the hybrid model to minimize the gap between the prior model and reality, and a real-time multi-contact MPC controller. We demonstrated the effectiveness of the framework in synthetic examples, and applied it on hardware to solve contact-rich manipulation tasks, where a robot uses its end-effector to roll different unknown objects on a table to track given paths. The hardware experiments show that with a rough prior model, the multi-contact MPC controller adapts itself on-the-fly with an adaption rate around 20 Hz and successfully manipulates previously unknown objects with non-smooth surface geometries.
Reinforcement Learning for Reduced-order Models of Legged Robots
Oct 15, 2023Model-based approaches for planning and control for bipedal locomotion have a long history of success. It can provide stability and safety guarantees while being effective in accomplishing many locomotion tasks. Model-free reinforcement learning, on the other hand, has gained much popularity in recent years due to computational advancements. It can achieve high performance in specific tasks, but it lacks physical interpretability and flexibility in re-purposing the policy for a different set of tasks. For instance, we can initially train a neural network (NN) policy using velocity commands as inputs. However, to handle new task commands like desired hand or footstep locations at a desired walking velocity, we must retrain a new NN policy. In this work, we attempt to bridge the gap between these two bodies of work on a bipedal platform. We formulate a model-based reinforcement learning problem to learn a reduced-order model (ROM) within a model predictive control (MPC). Results show a 49% improvement in viable task region size and a 21% reduction in motor torque cost. All videos and code are available at https://sites.google.com/view/ymchen/research/rl-for-roms.
Enhancing Task Performance of Learned Simplified Models via Reinforcement Learning
Oct 15, 2023In contact-rich tasks, the hybrid, multi-modal nature of contact dynamics poses great challenges in model representation, planning, and control. Recent efforts have attempted to address these challenges via data-driven methods, learning dynamical models in combination with model predictive control. Those methods, while effective, rely solely on minimizing forward prediction errors to hope for better task performance with MPC controllers. This weak correlation can result in data inefficiency as well as limitations to overall performance. In response, we propose a novel strategy: using a policy gradient algorithm to find a simplified dynamics model that explicitly maximizes task performance. Specifically, we parameterize the stochastic policy as the perturbed output of the MPC controller, thus, the learned model representation can directly associate with the policy or task performance. We apply the proposed method to contact-rich tasks where a three-fingered robotic hand manipulates previously unknown objects. Our method significantly enhances task success rate by up to 15% in manipulating diverse objects compared to the existing method while sustaining data efficiency. Our method can solve some tasks with success rates of 70% or higher using under 30 minutes of data. All videos and codes are available at https://sites.google.com/view/lcs-rl.
Instance-Agnostic Geometry and Contact Dynamics Learning
Sep 28, 2023This work presents an instance-agnostic learning framework that fuses vision with dynamics to simultaneously learn shape, pose trajectories, and physical properties via the use of geometry as a shared representation. Unlike many contact learning approaches that assume motion capture input and a known shape prior for the collision model, our proposed framework learns an object's geometric and dynamic properties from RGBD video, without requiring either category-level or instance-level shape priors. We integrate a vision system, BundleSDF, with a dynamics system, ContactNets, and propose a cyclic training pipeline to use the output from the dynamics module to refine the poses and the geometry from the vision module, using perspective reprojection. Experiments demonstrate our framework's ability to learn the geometry and dynamics of rigid and convex objects and improve upon the current tracking framework.
Bipedal Walking on Constrained Footholds with MPC Footstep Control
Sep 14, 2023Bipedal robots promise the ability to traverse rough terrain quickly and efficiently, and indeed, humanoid robots can now use strong ankles and careful foot placement to traverse discontinuous terrain. However, more agile underactuated bipeds have small feet and weak ankles, and must constantly adjust their planned footstep position to maintain balance. We introduce a new model-predictive footstep controller which jointly optimizes over the robot's discrete choice of stepping surface, impending footstep position sequence, ankle torque in the sagittal plane, and center of mass trajectory, to track a velocity command. The controller is formulated as a single Mixed Integer Quadratic Program (MIQP) which is solved at 50-200 Hz, depending on terrain complexity. We implement a state of the art real-time elevation mapping and convex terrain decomposition framework to inform the controller of its surroundings in the form on convex polygons representing steppable terrain. We investigate the capabilities and challenges of our approach through hardware experiments on the underactuated biped Cassie.
Consensus Complementarity Control for Multi-Contact MPC
Apr 21, 2023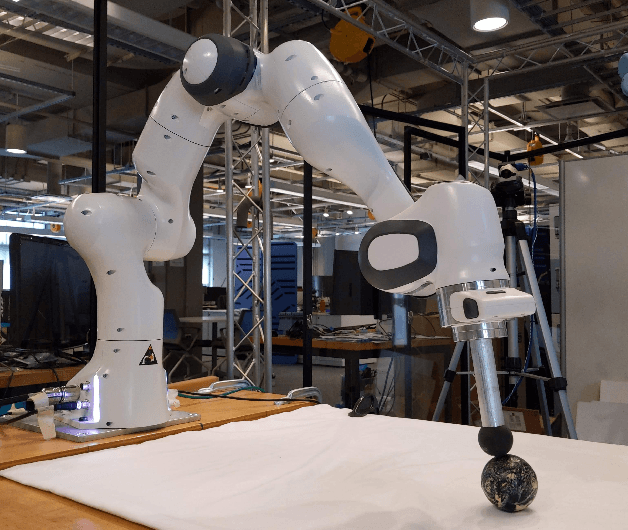
We propose a hybrid model predictive control algorithm, consensus complementarity control (C3), for systems that make and break contact with their environment. Many state-of-the-art controllers for tasks which require initiating contact with the environment, such as locomotion and manipulation, require a priori mode schedules or are too computationally complex to run at real-time rates. We present a method based on the alternating direction method of multipliers (ADMM) that is capable of high-speed reasoning over potential contact events. Via a consensus formulation, our approach enables parallelization of the contact scheduling problem. We validate our results on five numerical examples, including four high-dimensional frictional contact problems, and a physical experimentation on an underactuated multi-contact system. We further demonstrate the effectiveness of our method on a physical experiment accomplishing a high-dimensional, multi-contact manipulation task with a robot arm.
Impact-Invariant Control: Maximizing Control Authority During Impacts
Mar 01, 2023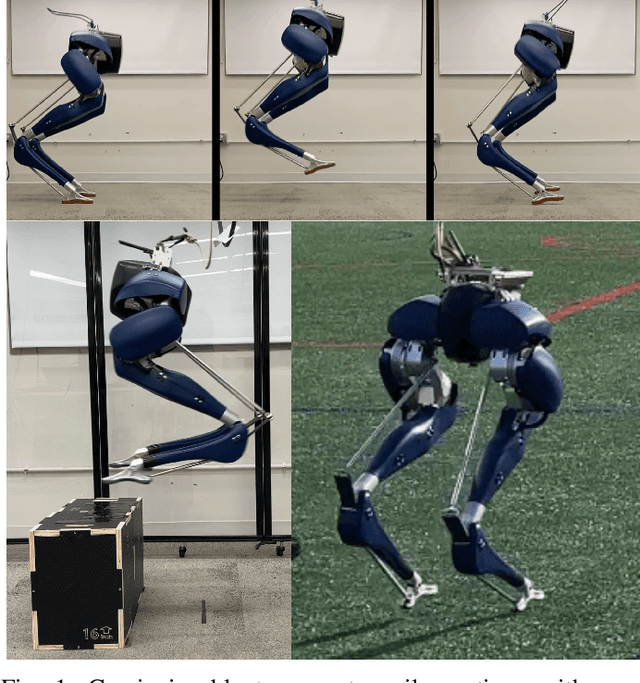
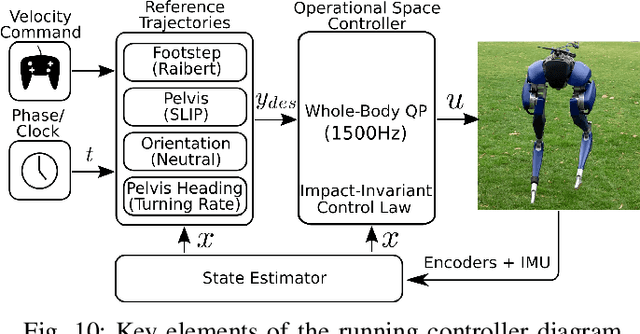
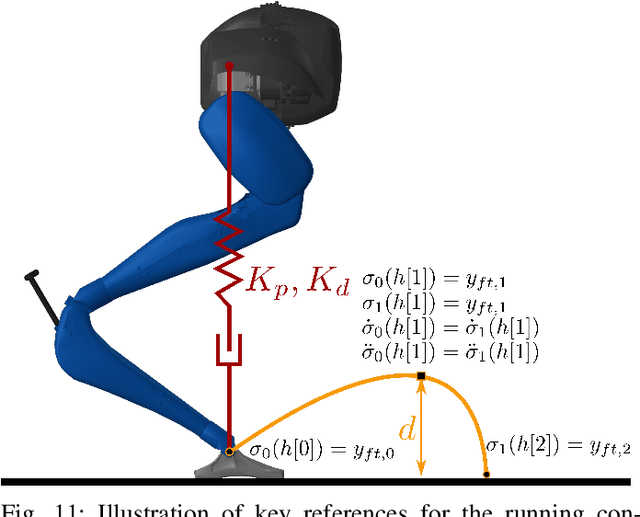
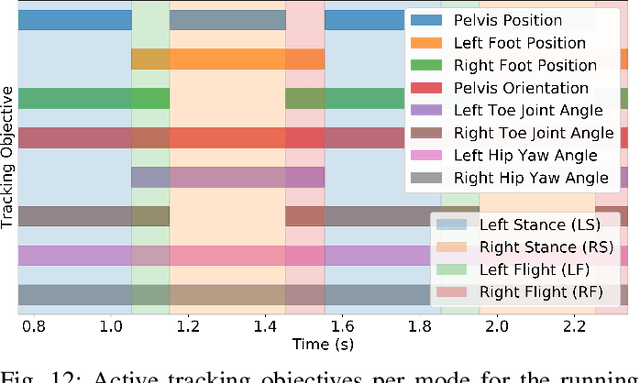
When legged robots impact their environment, they undergo large changes in their velocities in a short amount of time. Measuring and applying feedback to these velocities is challenging, further complicated by uncertainty in the impact model and impact timing. This work proposes a general framework for adapting feedback control during impact by projecting the control objectives to a subspace that is invariant to the impact event. The resultant controller is robust to uncertainties in the impact event while maintaining maximum control authority over the impact-invariant subspace. We demonstrate the improved performance of the projection over other commonly used heuristics on a walking controller for a planar five-link-biped. The projection is also applied to jumping, box jumping on to a platform 0.4 m tall, and running controllers for the compliant 3D bipedal robot, Cassie. The modification is easily applied to these various controllers and is a critical component to deploying on the physical robot.
Beyond Inverted Pendulums: Task-optimal Simple Models of Legged Locomotion
Jan 05, 2023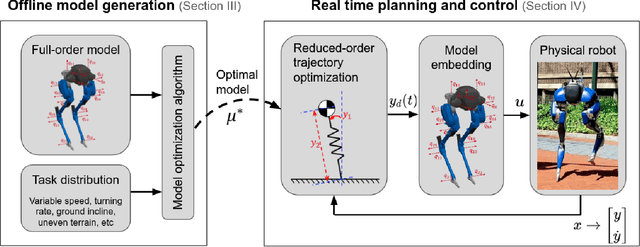
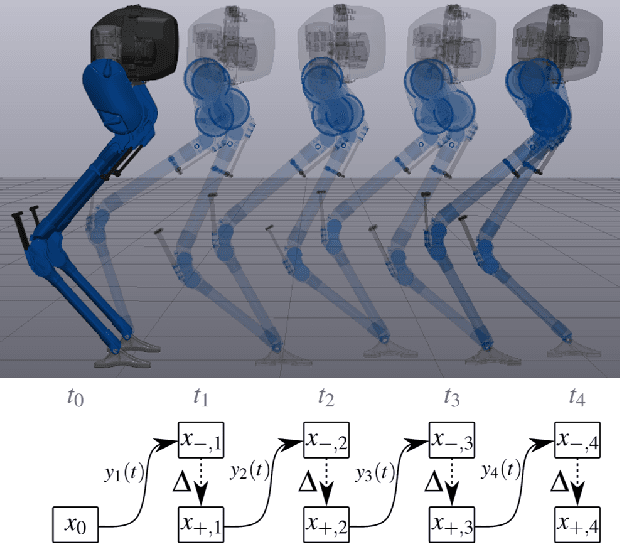
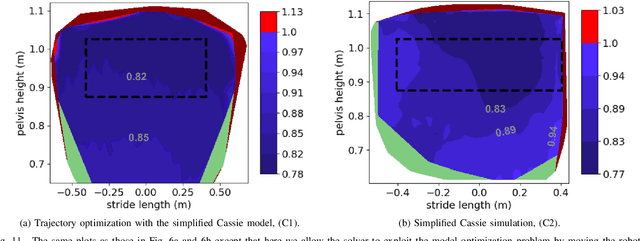
Reduced-order models (ROM) are popular in online motion planning due to their simplicity. A good ROM captures the bulk of the full model's dynamics while remaining low dimension. However, planning within the reduced-order space unavoidably constrains the full model, and hence we sacrifice the full potential of the robot. In the community of legged locomotion, this has lead to a search for better model extensions, but many of these extensions require human intuition, and there has not existed a principled way of evaluating the model performance and discovering new models. In this work, we propose a model optimization algorithm that automatically synthesizes reduced-order models, optimal with respect to any user-specified cost function. To demonstrate our work, we optimized models for a bipedal robot Cassie. We show in hardware experiment that the optimal ROM is simple enough for real time planning application and that the real robot achieves higher performance by using the optimal ROM.