 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMingrui Yu
In-Hand Following of Deformable Linear Objects Using Dexterous Fingers with Tactile Sensing
Mar 19, 2024
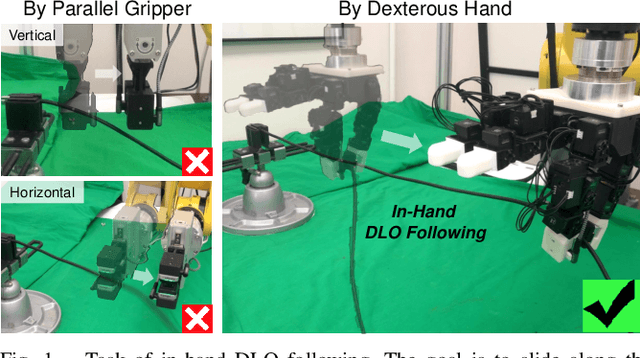

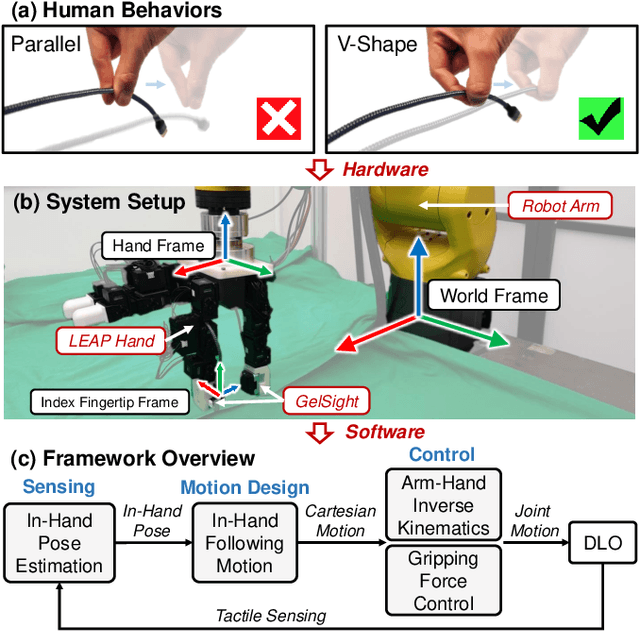
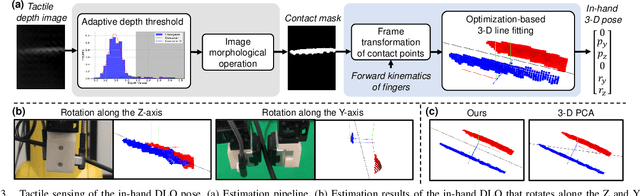
Most research on deformable linear object (DLO) manipulation assumes rigid grasping. However, beyond rigid grasping and re-grasping, in-hand following is also an essential skill that humans use to dexterously manipulate DLOs, which requires continuously changing the grasp point by in-hand sliding while holding the DLO to prevent it from falling. Achieving such a skill is very challenging for robots without using specially designed but not versatile end-effectors. Previous works have attempted using generic parallel grippers, but their robustness is unsatisfactory owing to the conflict between following and holding, which is hard to balance with a one-degree-of-freedom gripper. In this work, inspired by how humans use fingers to follow DLOs, we explore the usage of a generic dexterous hand with tactile sensing to imitate human skills and achieve robust in-hand DLO following. To enable the hardware system to function in the real world, we develop a framework that includes Cartesian-space arm-hand control, tactile-based in-hand 3-D DLO pose estimation, and task-specific motion design. Experimental results demonstrate the significant superiority of our method over using parallel grippers, as well as its great robustness, generalizability, and efficiency.
Contact-Implicit Model Predictive Control for Dexterous In-hand Manipulation: A Long-Horizon and Robust Approach
Mar 11, 2024Dexterous in-hand manipulation is an essential skill of production and life. Nevertheless, the highly stiff and mutable features of contacts cause limitations to real-time contact discovery and inference, which degrades the performance of model-based methods. Inspired by recent advancements in contact-rich locomotion and manipulation, this paper proposes a novel model-based approach to control dexterous in-hand manipulation and overcome the current limitations. The proposed approach has the attractive feature, which allows the robot to robustly execute long-horizon in-hand manipulation without pre-defined contact sequences or separated planning procedures. Specifically, we design a contact-implicit model predictive controller at high-level to generate real-time contact plans, which are executed by the low-level tracking controller. Compared with other model-based methods, such a long-horizon feature enables replanning and robust execution of contact-rich motions to achieve large-displacement in-hand tasks more efficiently; Compared with existing learning-based methods, the proposed approach achieves the dexterity and also generalizes to different objects without any pre-training. Detailed simulations and ablation studies demonstrate the efficiency and effectiveness of our method. It runs at 20Hz on the 23-degree-of-freedom long-horizon in-hand object rotation task.
Generalizable whole-body global manipulation of deformable linear objects by dual-arm robot in 3-D constrained environments
Oct 15, 2023



Constrained environments are common in practical applications of manipulating deformable linear objects (DLOs), where movements of both DLOs and robots should be constrained. This task is high-dimensional and highly constrained owing to the highly deformable DLOs, dual-arm robots with high degrees of freedom, and 3-D complex environments, which render global planning challenging. Furthermore, accurate DLO models needed by planning are often unavailable owing to their strong nonlinearity and diversity, resulting in unreliable planned paths. This article focuses on the global moving and shaping of DLOs in constrained environments by dual-arm robots. The main objectives are 1) to efficiently and accurately accomplish this task, and 2) to achieve generalizable and robust manipulation of various DLOs. To this end, we propose a complementary framework with whole-body planning and control using appropriate DLO model representations. First, a global planner is proposed to efficiently find feasible solutions based on a simplified DLO energy model, which considers the full system states and all constraints to plan more reliable paths. Then, a closed-loop manipulation scheme is proposed to compensate for the modeling errors and enhance the robustness and accuracy, which incorporates a model predictive controller that real-time adjusts the robot motion based on an adaptive DLO motion model. The key novelty is that our framework can efficiently solve the high-dimensional problem subject to multiple constraints and generalize to various DLOs without elaborate model identifications. Experiments demonstrate that our framework can accomplish considerably more complicated tasks than existing works, with significantly higher efficiency, generalizability, and reliability.
Learning to Occlusion-Robustly Estimate 3-D States of Deformable Linear Objects from Single-Frame Point Clouds
Oct 04, 2022



Accurately and robustly estimating the state of deformable linear objects (DLOs), such as ropes and wires, is crucial for DLO manipulation and other applications. However, it remains a challenging open issue due to the high dimensionality of the state space, frequent occlusion, and noises. This paper focuses on learning to robustly estimate the states of DLOs from single-frame point clouds in the presence of occlusions using a data-driven method. We propose a novel two-branch network architecture to exploit global and local information of input point cloud respectively and design a fusion module to effectively leverage both the advantages. Simulation and real-world experimental results demonstrate that our method can generate globally smooth and locally precise DLO state estimation results even with heavily occluded point clouds, which can be directly applied to real-world robotic manipulation of DLOs in 3-D space.
A Coarse-to-Fine Framework for Dual-Arm Manipulation of Deformable Linear Objects with Whole-Body Obstacle Avoidance
Sep 22, 2022



Manipulating deformable linear objects (DLOs) to achieve desired shapes in constrained environments with obstacles is a meaningful but challenging tasks. Global planning is necessary for such a highly-constrained task; however, accurate models of DLOs required by planners are difficult to obtain owing to their deformable nature, and the inevitable modeling errors significantly affect the planning results, probably resulting in task failure if the robot simply executes the planned path in an open-loop manner. In this paper, we propose a coarse-to-fine framework to combine global planning and local control for dual-arm manipulation of DLOs, capable of precisely achieving desired configurations and avoiding potential collisions between the DLO, robot, and obstacles. Specifically, the global planner refers to a simple yet effective DLO energy model and computes a coarse path to guarantee the feasibility of the task; then the local controller follows that path as guidance and further shapes it with closed-loop feedback to compensate for the planning errors and guarantee the accuracy of the task. Both simulations and real-world experiments demonstrate that our framework can robustly achieve desired DLO configurations in constrained environments with imprecise DLO models. which may not be reliably achieved by only planning or control.
Global Model Learning for Large Deformation Control of Elastic Deformable Linear Objects: An Efficient and Adaptive Approach
May 09, 2022



Robotic manipulation of deformable linear objects (DLOs) has broad application prospects in many fields. However, a key issue is to obtain the exact deformation models (i.e., how robot motion affects DLO deformation), which are hard to theoretically calculate and vary among different DLOs. Thus, shape control of DLOs is challenging, especially for large deformation control which requires global and more accurate models. In this paper, we propose a coupled offline and online data-driven method for efficiently learning a global deformation model, allowing for both accurate modeling through offline learning and further updating for new DLOs via online adaptation. Specifically, the model approximated by a neural network is first trained offline on random data, then seamlessly migrated to the online phase, and further updated online during actual manipulation. Several strategies are introduced to improve the model's efficiency and generalization ability. We propose a convex-optimization-based controller, and analyze the system's stability using the Lyapunov method. Detailed simulations and real-world experiments demonstrate that our method can efficiently and precisely estimate the deformation model, and achieve large deformation control of untrained DLOs in 2D and 3D dual-arm manipulation tasks better than the existing methods. It accomplishes all 24 tasks with different desired shapes on different DLOs in the real world, using only simulation data for the offline learning.
Shape Control of Deformable Linear Objects with Offline and Online Learning of Local Linear Deformation Models
Sep 23, 2021



The shape control of deformable linear objects (DLOs) is challenging, since it is difficult to obtain the deformation models. Previous studies often approximate the models in purely offline or online ways. In this paper, we propose a scheme for the shape control of DLOs, where the unknown model is estimated with both offline and online learning. The model is formulated in a local linear format, and approximated by a neural network (NN). First, the NN is trained offline to provide a good initial estimation of the model, which can directly migrate to the online phase. Then, an adaptive controller is proposed to achieve the shape control tasks, in which the NN is further updated online to compensate for any errors in the offline model caused by insufficient training or changes of DLO properties. The simulation and real-world experiments show that the proposed method can precisely and efficiently accomplish the DLO shape control tasks, and adapt well to new and untrained DLOs.
Adaptive Control for Robotic Manipulation of Deformable Linear Objects with Offline and Online Learning of Unknown Models
Jul 01, 2021



The deformable linear objects (DLOs) are common in both industrial and domestic applications, such as wires, cables, ropes. Because of its highly deformable nature, it is difficult for the robot to reproduce human's dexterous skills on DLOs. In this paper, the unknown deformation model is estimated in both the offline and online manners. The offline learning aims to provide a good approximation prior to the manipulation task, while the online learning aims to compensate the errors due to insufficient training (e.g. limited datasets) in the offline phase. The offline module works by constructing a series of supervised neural networks (NNs), then the online module receives the learning results directly and further updates them with the technique of adaptive NNs. A new adaptive controller is also proposed to allow the robot to perform manipulation tasks concurrently in the online phase. The stability of the closed-loop system and the convergence of task errors are rigorously proved with Lyapunov method. Simulation studies are presented to illustrate the performance of the proposed method.