 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoonkwang Jeong
A Magnetic Millirobot Walks on Slippery Biological Surfaces for Targeted Cargo Delivery
Mar 07, 2024
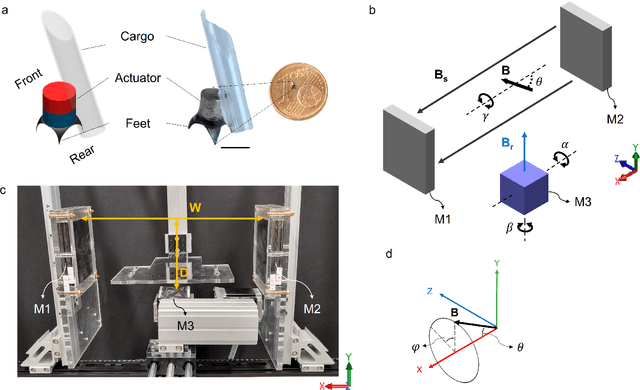
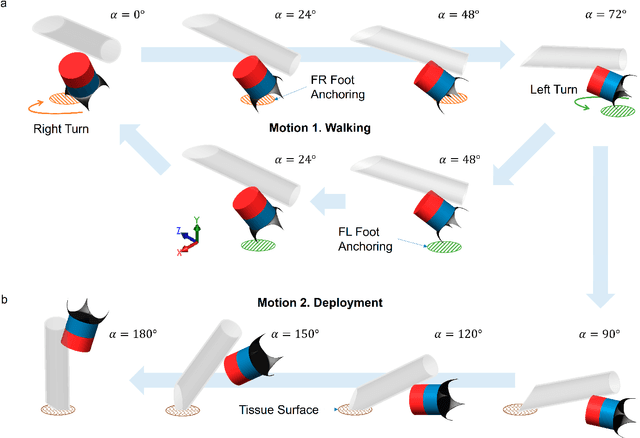
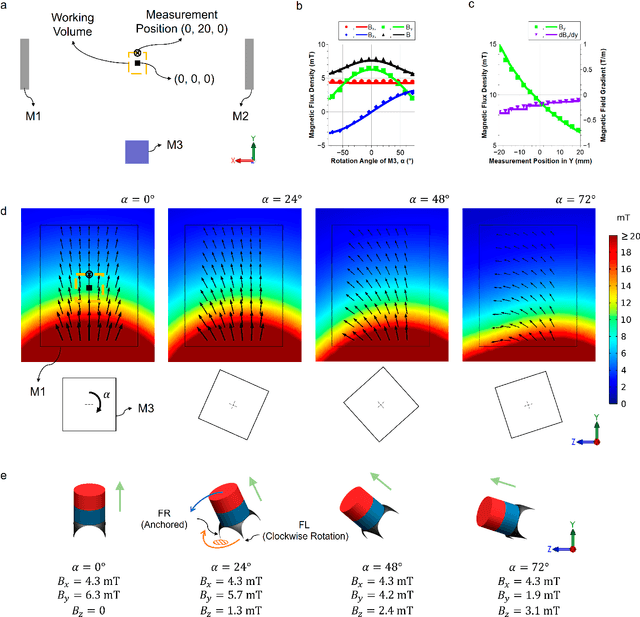

Small-scale robots hold great potential for targeted cargo delivery in minimally-inv asive medicine. However, current robots often face challenges to locomote efficiently on slip pery biological tissue surfaces, especially when loaded with heavy cargos. Here, we report a magnetic millirobot that can walk on rough and slippery biological tissues by anchoring itself on the soft tissue surface alternatingly with two feet and reciprocally rotating the body to mov e forward. We experimentally studied the locomotion, validated it with numerical simulations and optimized the actuation parameters to fit various terrains and loading conditions. Further more, we developed a permanent magnet set-up to enable wireless actuation within a huma n-scale volume which allows precise control of the millirobot to follow complex trajectories, cl imb vertical walls, and carry cargo up to four times of its own weight. Upon reaching the targ et location, it performs a deployment sequence to release the liquid drug into tissues. The ro bust gait of our millirobot on rough biological terrains, combined with its heavy load capacity, make it a versatile and effective miniaturized vehicle for targeted cargo delivery.
A Miniaturized Device for Ultrafast On-demand Drug Release based on a Gigahertz Ultrasonic Resonator
Mar 05, 2024
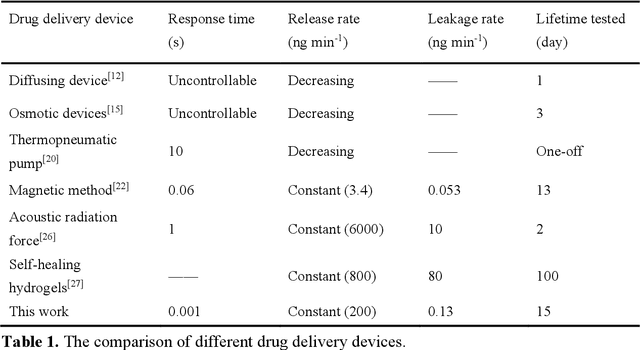
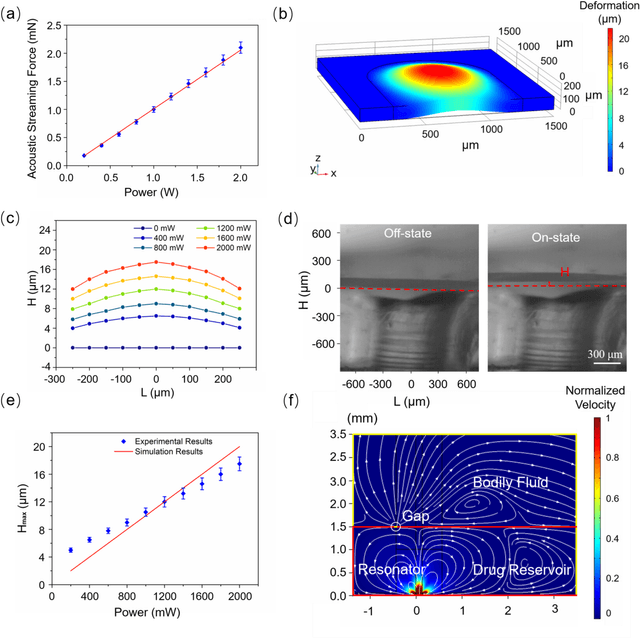
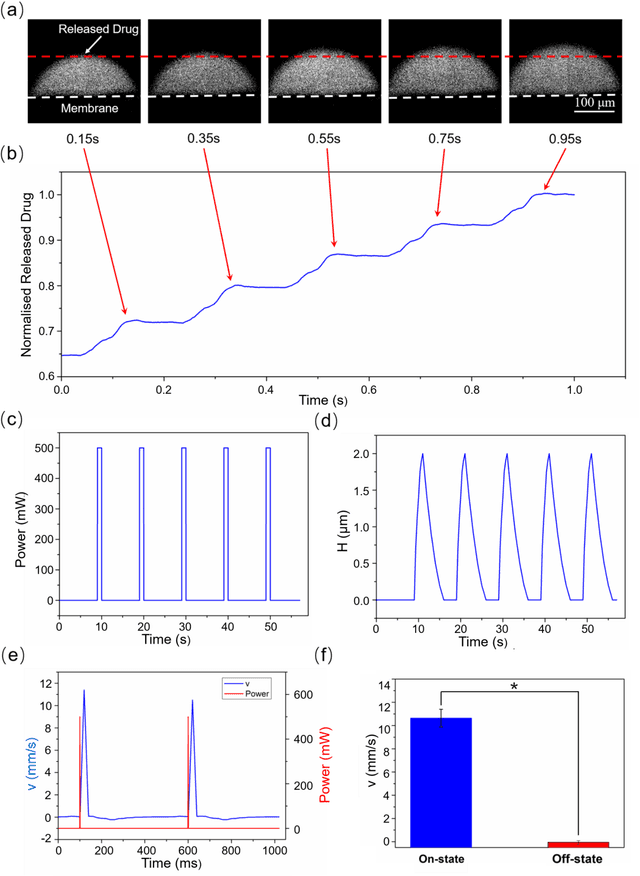
On-demand controlled drug delivery is essential for the treatment of a wide range of chronic diseases. As the drug is released at the time when required, its efficacy is boosted and the side effects are minimized. However, so far, drug delivery devices often rely on the passive diffusion process for a sustained release, which is slow and uncontrollable. Here, we present a miniaturized microfluidic device for wirelessly controlled ultrafast active drug delivery, driven by an oscillating solid-liquid interface. The oscillation generates acoustic streaming in the drug reservoir, which opens an elastic valve to deliver the drug. High-speed microscopy reveals the fast response of the valve on the order of 1 ms, which is more than three orders of magnitude faster than the start-of-the-art. The amount of the released drug exhibits a linear relationship with the working time and the electric power applied to the ultrasonic resonator. The trigger of the release is wirelessly controlled via a magnetic field, and the system shows stable output in a continuous experiment for two weeks. The integrated system shows great promise as a long-term controlled drug delivery implant for chronic diseases.
* 19 pages, 6 figures, 1 table