 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNisar Ahmed
Exact Consistency Tests for Gaussian Mixture Filters using Normalized Deviation Squared Statistics
Dec 29, 2023
We consider the problem of evaluating dynamic consistency in discrete time probabilistic filters that approximate stochastic system state densities with Gaussian mixtures. Dynamic consistency means that the estimated probability distributions correctly describe the actual uncertainties. As such, the problem of consistency testing naturally arises in applications with regards to estimator tuning and validation. However, due to the general complexity of the density functions involved, straightforward approaches for consistency testing of mixture-based estimators have remained challenging to define and implement. This paper derives a new exact result for Gaussian mixture consistency testing within the framework of normalized deviation squared (NDS) statistics. It is shown that NDS test statistics for generic multivariate Gaussian mixture models exactly follow mixtures of generalized chi-square distributions, for which efficient computational tools are available. The accuracy and utility of the resulting consistency tests are numerically demonstrated on static and dynamic mixture estimation examples.
Observation-Augmented Contextual Multi-Armed Bandits for Robotic Exploration with Uncertain Semantic Data
Dec 19, 2023For robotic decision-making under uncertainty, the balance between exploitation and exploration of available options must be carefully taken into account. In this study, we introduce a new variant of contextual multi-armed bandits called observation-augmented CMABs (OA-CMABs) wherein a decision-making agent can utilize extra outcome observations from an external information source. CMABs model the expected option outcomes as a function of context features and hidden parameters, which are inferred from previous option outcomes. In OA-CMABs, external observations are also a function of context features and thus provide additional evidence about the hidden parameters. Yet, if an external information source is error-prone, the resulting posterior updates can harm decision-making performance unless the presence of errors is considered. To this end, we propose a robust Bayesian inference process for OA-CMABs that is based on the concept of probabilistic data validation. Our approach handles complex mixture model parameter priors and hybrid observation likelihoods for semantic data sources, allowing us to develop validation algorithms based on recently develop probabilistic semantic data association techniques. Furthermore, to more effectively cope with the combined sources of uncertainty in OA-CMABs, we derive a new active inference algorithm for option selection based on expected free energy minimization. This generalizes previous work on active inference for bandit-based robotic decision-making by accounting for faulty observations and non-Gaussian inference. Our approaches are demonstrated on a simulated asynchronous search site selection problem for space exploration. The results show that even if incorrect observations are provided by external information sources, efficient decision-making and robust parameter inference are still achieved in a wide variety of experimental conditions.
Human-Centered Autonomy for UAS Target Search
Sep 18, 2023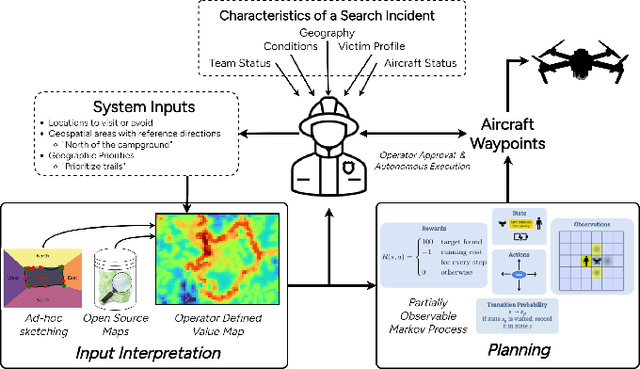
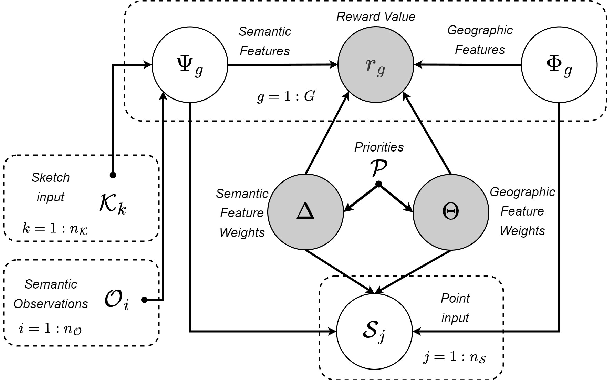
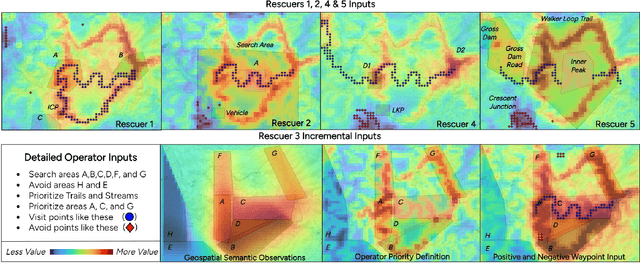
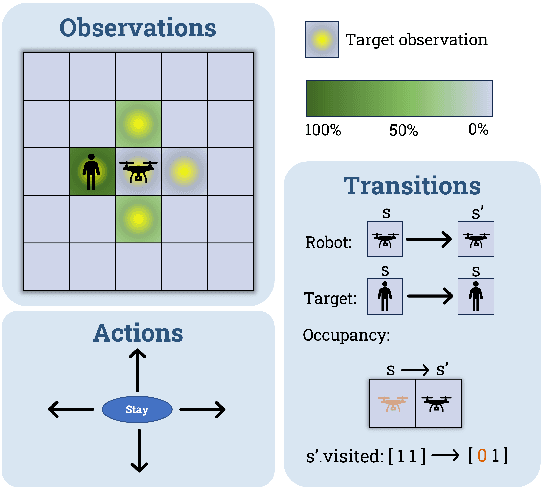
Current methods of deploying robots that operate in dynamic, uncertain environments, such as Uncrewed Aerial Systems in search \& rescue missions, require nearly continuous human supervision for vehicle guidance and operation. These methods do not consider high-level mission context resulting in cumbersome manual operation or inefficient exhaustive search patterns. We present a human-centered autonomous framework that infers geospatial mission context through dynamic feature sets, which then guides a probabilistic target search planner. Operators provide a set of diverse inputs, including priority definition, spatial semantic information about ad-hoc geographical areas, and reference waypoints, which are probabilistically fused with geographical database information and condensed into a geospatial distribution representing an operator's preferences over an area. An online, POMDP-based planner, optimized for target searching, is augmented with this reward map to generate an operator-constrained policy. Our results, simulated based on input from five professional rescuers, display effective task mental model alignment, 18\% more victim finds, and 15 times more efficient guidance plans then current operational methods.
Blind Image Quality Assessment Using Multi-Stream Architecture with Spatial and Channel Attention
Jul 31, 2023



BIQA (Blind Image Quality Assessment) is an important field of study that evaluates images automatically. Although significant progress has been made, blind image quality assessment remains a difficult task since images vary in content and distortions. Most algorithms generate quality without emphasizing the important region of interest. In order to solve this, a multi-stream spatial and channel attention-based algorithm is being proposed. This algorithm generates more accurate predictions with a high correlation to human perceptual assessment by combining hybrid features from two different backbones, followed by spatial and channel attention to provide high weights to the region of interest. Four legacy image quality assessment datasets are used to validate the effectiveness of our proposed approach. Authentic and synthetic distortion image databases are used to demonstrate the effectiveness of the proposed method, and we show that it has excellent generalization properties with a particular focus on the perceptual foreground information.
Kalman Filter Auto-tuning through Enforcing Chi-Squared Normalized Error Distributions with Bayesian Optimization
Jun 12, 2023



The nonlinear and stochastic relationship between noise covariance parameter values and state estimator performance makes optimal filter tuning a very challenging problem. Popular optimization-based tuning approaches can easily get trapped in local minima, leading to poor noise parameter identification and suboptimal state estimation. Recently, black box techniques based on Bayesian optimization with Gaussian processes (GPBO) have been shown to overcome many of these issues, using normalized estimation error squared (NEES) and normalized innovation error (NIS) statistics to derive cost functions for Kalman filter auto-tuning. While reliable noise parameter estimates are obtained in many cases, GPBO solutions obtained with these conventional cost functions do not always converge to optimal filter noise parameters and lack robustness to parameter ambiguities in time-discretized system models. This paper addresses these issues by making two main contributions. First, we show that NIS and NEES errors are only chi-squared distributed for tuned estimators. As a result, chi-square tests are not sufficient to ensure that an estimator has been correctly tuned. We use this to extend the familiar consistency tests for NIS and NEES to penalize if the distribution is not chi-squared distributed. Second, this cost measure is applied within a Student-t processes Bayesian Optimization (TPBO) to achieve robust estimator performance for time discretized state space models. The robustness, accuracy, and reliability of our approach are illustrated on classical state estimation problems.
Deep Ensembling for Perceptual Image Quality Assessment
May 16, 2023Blind image quality assessment is a challenging task particularly due to the unavailability of reference information. Training a deep neural network requires a large amount of training data which is not readily available for image quality. Transfer learning is usually opted to overcome this limitation and different deep architectures are used for this purpose as they learn features differently. After extensive experiments, we have designed a deep architecture containing two CNN architectures as its sub-units. Moreover, a self-collected image database BIQ2021 is proposed with 12,000 images having natural distortions. The self-collected database is subjectively scored and is used for model training and validation. It is demonstrated that synthetic distortion databases cannot provide generalization beyond the distortion types used in the database and they are not ideal candidates for general-purpose image quality assessment. Moreover, a large-scale database of 18.75 million images with synthetic distortions is used to pretrain the model and then retrain it on benchmark databases for evaluation. Experiments are conducted on six benchmark databases three of which are synthetic distortion databases (LIVE, CSIQ and TID2013) and three are natural distortion databases (LIVE Challenge Database, CID2013 and KonIQ-10 k). The proposed approach has provided a Pearson correlation coefficient of 0.8992, 0.8472 and 0.9452 subsequently and Spearman correlation coefficient of 0.8863, 0.8408 and 0.9421. Moreover, the performance is demonstrated using perceptually weighted rank correlation to indicate the perceptual superiority of the proposed approach. Multiple experiments are conducted to validate the generalization performance of the proposed model by training on different subsets of the databases and validating on the test subset of BIQ2021 database.
PIQI: Perceptual Image Quality Index based on Ensemble of Gaussian Process Regression
May 16, 2023Digital images contain a lot of redundancies, therefore, compression techniques are applied to reduce the image size without loss of reasonable image quality. Same become more prominent in the case of videos which contains image sequences and higher compression ratios are achieved in low throughput networks. Assessment of quality of images in such scenarios has become of particular interest. Subjective evaluation in most of the scenarios is infeasible so objective evaluation is preferred. Among the three objective quality measures, full-reference and reduced-reference methods require an original image in some form to calculate the image quality which is unfeasible in scenarios such as broadcasting, acquisition or enhancement. Therefore, a no-reference Perceptual Image Quality Index (PIQI) is proposed in this paper to assess the quality of digital images which calculates luminance and gradient statistics along with mean subtracted contrast normalized products in multiple scales and color spaces. These extracted features are provided to a stacked ensemble of Gaussian Process Regression (GPR) to perform the perceptual quality evaluation. The performance of the PIQI is checked on six benchmark databases and compared with twelve state-of-the-art methods and competitive results are achieved. The comparison is made based on RMSE, Pearson and Spearman correlation coefficients between ground truth and predicted quality scores. The scores of 0.0552, 0.9802 and 0.9776 are achieved respectively for these metrics on CSIQ database. Two cross-dataset evaluation experiments are performed to check the generalization of PIQI.
Chance-Constrained Multi-Robot Motion Planning under Gaussian Uncertainties
Apr 04, 2023We consider a chance-constrained multi-robot motion planning problem in the presence of Gaussian motion and sensor noise. Our proposed algorithm, CC-K-CBS, leverages the scalability of kinodynamic conflict-based search (K-CBS) in conjunction with the efficiency of the Gaussian belief trees used in the Belief-A framework, and inherits the completeness guarantees of Belief-A's low-level sampling-based planner. We also develop three different methods for robot-robot probabilistic collision checking, which trade off computation with accuracy. Our algorithm generates motion plans driving each robot from its initial state to its goal while accounting for the evolution of its uncertainty with chance-constrained safety guarantees. Benchmarks compare computation time to conservatism of the collision checkers, in addition to characterizing the performance of the planner as a whole. Results show that CC-K-CBS can scale up to 30 robots.
AAAI 2022 Fall Symposium: Lessons Learned for Autonomous Assessment of Machine Abilities (LLAAMA)
Jan 13, 2023Modern civilian and military systems have created a demand for sophisticated intelligent autonomous machines capable of operating in uncertain dynamic environments. Such systems are realizable thanks in large part to major advances in perception and decision-making techniques, which in turn have been propelled forward by modern machine learning tools. However, these newer forms of intelligent autonomy raise questions about when/how communication of the operational intent and assessments of actual vs. supposed capabilities of autonomous agents impact overall performance. This symposium examines the possibilities for enabling intelligent autonomous systems to self-assess and communicate their ability to effectively execute assigned tasks, as well as reason about the overall limits of their competencies and maintain operability within those limits. The symposium brings together researchers working in this burgeoning area of research to share lessons learned, identify major theoretical and practical challenges encountered so far, and potential avenues for future research and real-world applications.
Chance-Constrained Motion Planning with Event-Triggered Estimation
Oct 13, 2022
We consider the problem of autonomous navigation using limited information from a remote sensor network. Because the remote sensors are power and bandwidth limited, we use event-triggered (ET) estimation to manage communication costs. We introduce a fast and efficient sampling-based planner which computes motion plans coupled with ET communication strategies that minimize communication costs, while satisfying constraints on the probability of reaching the goal region and the point-wise probability of collision. We derive a novel method for offline propagation of the expected state distribution, and corresponding bounds on this distribution. These bounds are used to evaluate the chance constraints in the algorithm. Case studies establish the validity of our approach, demonstrating fast computation of optimal plans.