 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePaolo Rocco
Deep Functional Predictive Control for Strawberry Cluster Manipulation using Tactile Prediction
Mar 09, 2023

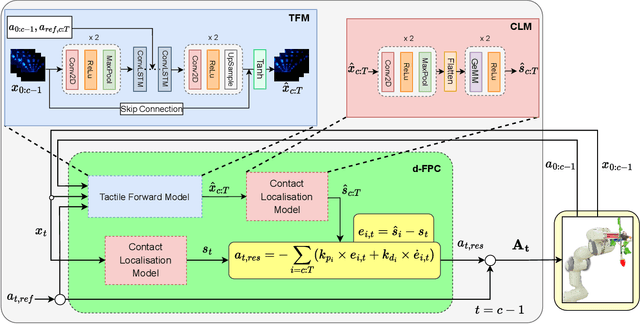
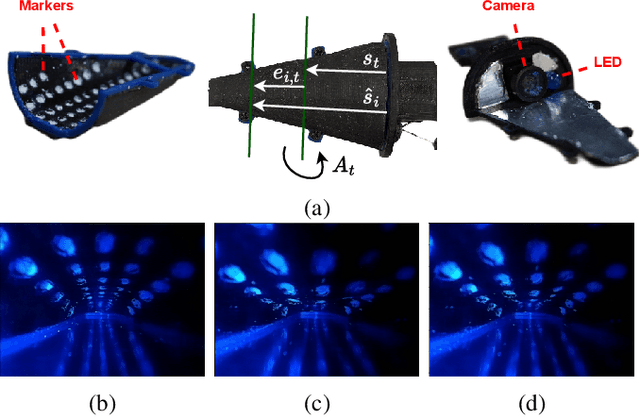
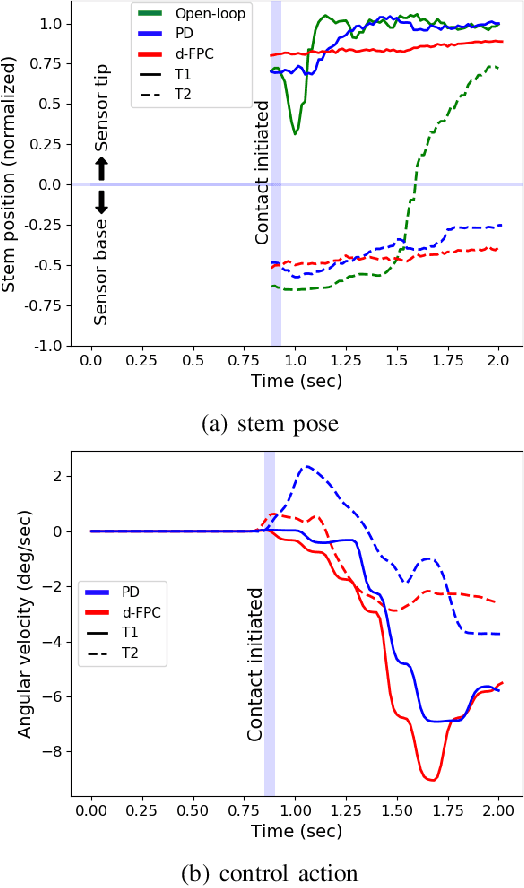
This paper introduces a novel approach to address the problem of Physical Robot Interaction (PRI) during robot pushing tasks. The approach uses a data-driven forward model based on tactile predictions to inform the controller about potential future movements of the object being pushed, such as a strawberry stem, using a robot tactile finger. The model is integrated into a Deep Functional Predictive Control (d-FPC) system to control the displacement of the stem on the tactile finger during pushes. Pushing an object with a robot finger along a desired trajectory in 3D is a highly nonlinear and complex physical robot interaction, especially when the object is not stably grasped. The proposed approach controls the stem movements on the tactile finger in a prediction horizon. The effectiveness of the proposed FPC is demonstrated in a series of tests involving a real robot pushing a strawberry in a cluster. The results indicate that the d-FPC controller can successfully control PRI in robotic manipulation tasks beyond the handling of strawberries. The proposed approach offers a promising direction for addressing the challenging PRI problem in robotic manipulation tasks. Future work will explore the generalisation of the approach to other objects and tasks.
Whole-Body MPC and Dynamic Occlusion Avoidance: A Maximum Likelihood Visibility Approach
Mar 04, 2022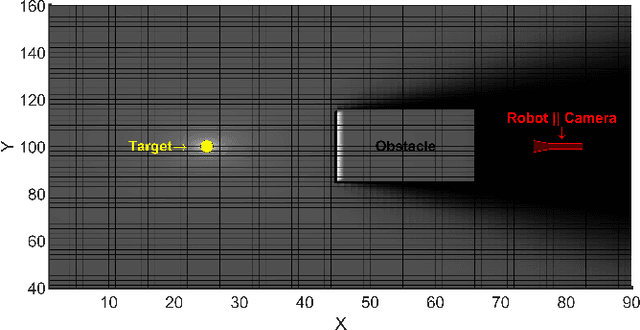
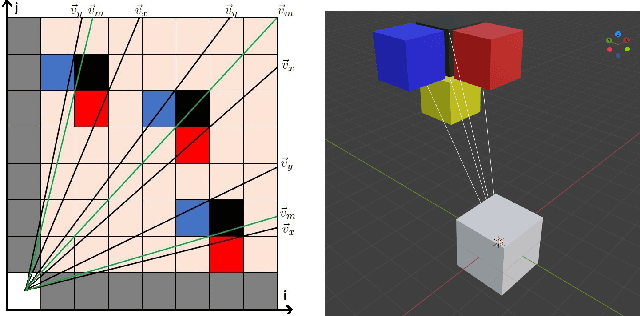
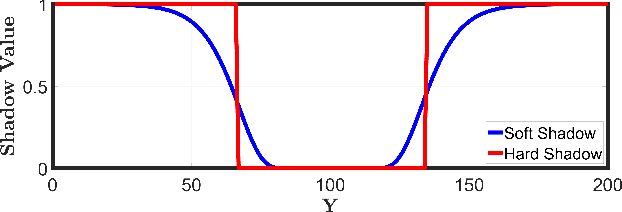
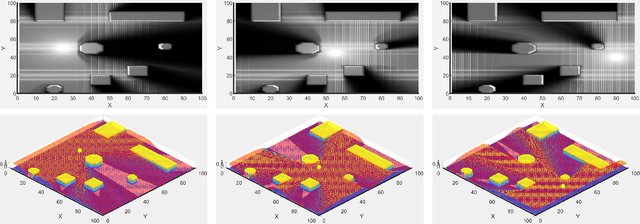
This paper introduces a novel approach for whole-body motion planning and dynamic occlusion avoidance. The proposed approach reformulates the visibility constraint as a likelihood maximization of visibility probability. In this formulation, we augment the primary cost function of a whole-body model predictive control scheme through a relaxed log barrier function yielding a relaxed log-likelihood maximization formulation of visibility probability. The visibility probability is computed through a probabilistic shadow field that quantifies point light source occlusions. We provide the necessary algorithms to obtain such a field for both 2D and 3D cases. We demonstrate 2D implementations of this field in simulation and 3D implementations through real-time hardware experiments. We show that due to the linear complexity of our shadow field algorithm to the map size, we can achieve high update rates, which facilitates onboard execution on mobile platforms with limited computational power. Lastly, we evaluate the performance of the proposed MPC reformulation in simulation for a quadrupedal mobile manipulator.
Optimization-Based Quadrupedal Hybrid Wheeled-Legged Locomotion
Jul 15, 2021



Hybrid wheeled-legged locomotion is a navigation paradigm only recently opened up by novel robotic designs,e.g. the centaur-type humanoid CENTAURO [1] or the quadruped ANYmal [2] in its configuration featuring non-steerable wheels. The term Hybrid Locomotion is hereafter used to indicate a particular type of locomotion, achieved with simultaneous and coordinate use of legs and wheels,see Fig. 1. Such choice stems at the intersection between legged locomotion and the simpler wheeled navigation, in order to get the best from both techniques: agility and ability to traverse uneven terrains from the first, speed and stability from the second. As a consequence, the problem of planning feasible trajectories for a hybrid robot shares many similarities with the legged locomotion problem: also in the hybrid case the motion of the base is reached through contact of the feet with the environment, taking into account that the wheeled feet can just push on the ground and not pull it. Forces compatible with friction cones have to be considered, while the contacts can slide just along the direction prescribed by the orientation of the wheels.