 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePashootan Vaezipoor
Fast Matrix Multiplication Without Tears: A Constraint Programming Approach
Jun 01, 2023
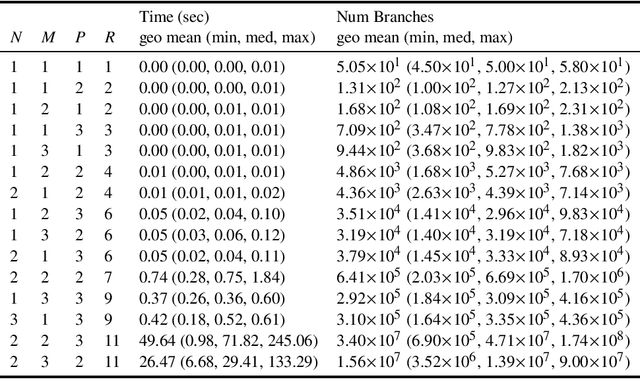
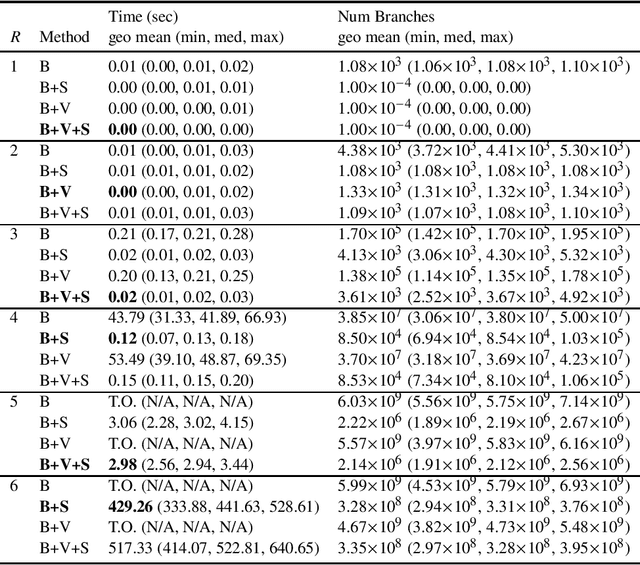
It is known that the multiplication of an $N \times M$ matrix with an $M \times P$ matrix can be performed using fewer multiplications than what the naive $NMP$ approach suggests. The most famous instance of this is Strassen's algorithm for multiplying two $2\times 2$ matrices in 7 instead of 8 multiplications. This gives rise to the constraint satisfaction problem of fast matrix multiplication, where a set of $R < NMP$ multiplication terms must be chosen and combined such that they satisfy correctness constraints on the output matrix. Despite its highly combinatorial nature, this problem has not been exhaustively examined from that perspective, as evidenced for example by the recent deep reinforcement learning approach of AlphaTensor. In this work, we propose a simple yet novel Constraint Programming approach to find non-commutative algorithms for fast matrix multiplication or provide proof of infeasibility otherwise. We propose a set of symmetry-breaking constraints and valid inequalities that are particularly helpful in proving infeasibility. On the feasible side, we find that exploiting solver performance variability in conjunction with a sparsity-based problem decomposition enables finding solutions for larger (feasible) instances of fast matrix multiplication. Our experimental results using CP Optimizer demonstrate that we can find fast matrix multiplication algorithms for matrices up to $3\times 3$ in a short amount of time.
LLMs and the Abstraction and Reasoning Corpus: Successes, Failures, and the Importance of Object-based Representations
May 26, 2023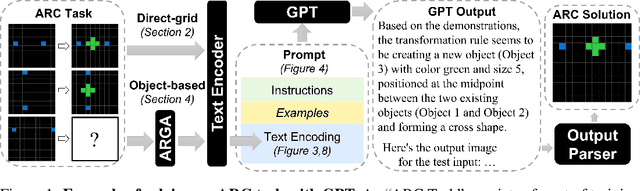
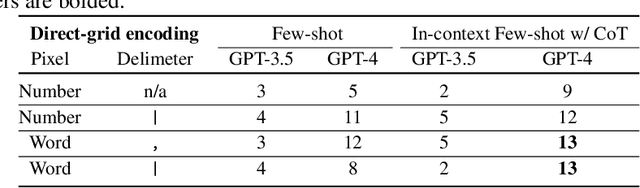


Can a Large Language Model (LLM) solve simple abstract reasoning problems? We explore this broad question through a systematic analysis of GPT on the Abstraction and Reasoning Corpus (ARC), a representative benchmark of abstract reasoning ability from limited examples in which solutions require some "core knowledge" of concepts such as objects, goal states, counting, and basic geometry. GPT-4 solves only 13/50 of the most straightforward ARC tasks when using textual encodings for their two-dimensional input-output grids. Our failure analysis reveals that GPT-4's capacity to identify objects and reason about them is significantly influenced by the sequential nature of the text that represents an object within a text encoding of a task. To test this hypothesis, we design a new benchmark, the 1D-ARC, which consists of one-dimensional (array-like) tasks that are more conducive to GPT-based reasoning, and where it indeed performs better than on the (2D) ARC. To alleviate this issue, we propose an object-based representation that is obtained through an external tool, resulting in nearly doubling the performance on solved ARC tasks and near-perfect scores on the easier 1D-ARC. Although the state-of-the-art GPT-4 is unable to "reason" perfectly within non-language domains such as the 1D-ARC or a simple ARC subset, our study reveals that the use of object-based representations can significantly improve its reasoning ability. Visualizations, GPT logs, and data are available at https://khalil-research.github.io/LLM4ARC.
Noisy Symbolic Abstractions for Deep RL: A case study with Reward Machines
Nov 23, 2022



Natural and formal languages provide an effective mechanism for humans to specify instructions and reward functions. We investigate how to generate policies via RL when reward functions are specified in a symbolic language captured by Reward Machines, an increasingly popular automaton-inspired structure. We are interested in the case where the mapping of environment state to a symbolic (here, Reward Machine) vocabulary -- commonly known as the labelling function -- is uncertain from the perspective of the agent. We formulate the problem of policy learning in Reward Machines with noisy symbolic abstractions as a special class of POMDP optimization problem, and investigate several methods to address the problem, building on existing and new techniques, the latter focused on predicting Reward Machine state, rather than on grounding of individual symbols. We analyze these methods and evaluate them experimentally under varying degrees of uncertainty in the correct interpretation of the symbolic vocabulary. We verify the strength of our approach and the limitation of existing methods via an empirical investigation on both illustrative, toy domains and partially observable, deep RL domains.
Learning to Follow Instructions in Text-Based Games
Nov 08, 2022



Text-based games present a unique class of sequential decision making problem in which agents interact with a partially observable, simulated environment via actions and observations conveyed through natural language. Such observations typically include instructions that, in a reinforcement learning (RL) setting, can directly or indirectly guide a player towards completing reward-worthy tasks. In this work, we study the ability of RL agents to follow such instructions. We conduct experiments that show that the performance of state-of-the-art text-based game agents is largely unaffected by the presence or absence of such instructions, and that these agents are typically unable to execute tasks to completion. To further study and address the task of instruction following, we equip RL agents with an internal structured representation of natural language instructions in the form of Linear Temporal Logic (LTL), a formal language that is increasingly used for temporally extended reward specification in RL. Our framework both supports and highlights the benefit of understanding the temporal semantics of instructions and in measuring progress towards achievement of such a temporally extended behaviour. Experiments with 500+ games in TextWorld demonstrate the superior performance of our approach.
Challenges to Solving Combinatorially Hard Long-Horizon Deep RL Tasks
Jun 03, 2022



Deep reinforcement learning has shown promise in discrete domains requiring complex reasoning, including games such as Chess, Go, and Hanabi. However, this type of reasoning is less often observed in long-horizon, continuous domains with high-dimensional observations, where instead RL research has predominantly focused on problems with simple high-level structure (e.g. opening a drawer or moving a robot as fast as possible). Inspired by combinatorially hard optimization problems, we propose a set of robotics tasks which admit many distinct solutions at the high-level, but require reasoning about states and rewards thousands of steps into the future for the best performance. Critically, while RL has traditionally suffered on complex, long-horizon tasks due to sparse rewards, our tasks are carefully designed to be solvable without specialized exploration. Nevertheless, our investigation finds that standard RL methods often neglect long-term effects due to discounting, while general-purpose hierarchical RL approaches struggle unless additional abstract domain knowledge can be exploited.
Augment with Care: Contrastive Learning for the Boolean Satisfiability Problem
Feb 17, 2022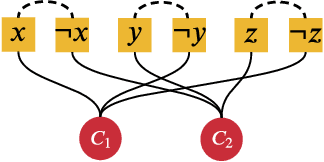
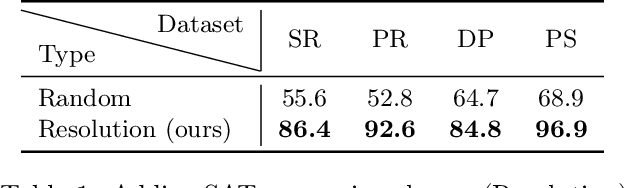
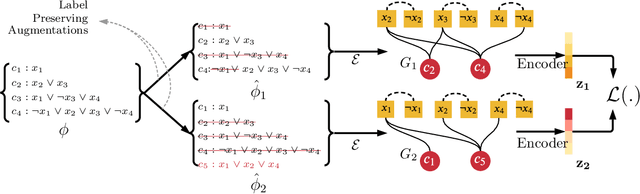
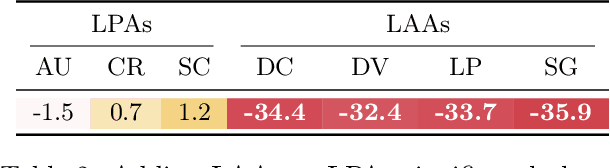
Supervised learning can improve the design of state-of-the-art solvers for combinatorial problems, but labelling large numbers of combinatorial instances is often impractical due to exponential worst-case complexity. Inspired by the recent success of contrastive pre-training for images, we conduct a scientific study of the effect of augmentation design on contrastive pre-training for the Boolean satisfiability problem. While typical graph contrastive pre-training uses label-agnostic augmentations, our key insight is that many combinatorial problems have well-studied invariances, which allow for the design of label-preserving augmentations. We find that label-preserving augmentations are critical for the success of contrastive pre-training. We show that our representations are able to achieve comparable test accuracy to fully-supervised learning while using only 1% of the labels. We also demonstrate that our representations are more transferable to larger problems from unseen domains.
Finding Backdoors to Integer Programs: A Monte Carlo Tree Search Framework
Oct 16, 2021



In Mixed Integer Linear Programming (MIP), a (strong) backdoor is a "small" subset of an instance's integer variables with the following property: in a branch-and-bound procedure, the instance can be solved to global optimality by branching only on the variables in the backdoor. Constructing datasets of pre-computed backdoors for widely used MIP benchmark sets or particular problem families can enable new questions around novel structural properties of a MIP, or explain why a problem that is hard in theory can be solved efficiently in practice. Existing algorithms for finding backdoors rely on sampling candidate variable subsets in various ways, an approach which has demonstrated the existence of backdoors for some instances from MIPLIB2003 and MIPLIB2010. However, these algorithms fall short of consistently succeeding at the task due to an imbalance between exploration and exploitation. We propose BaMCTS, a Monte Carlo Tree Search framework for finding backdoors to MIPs. Extensive algorithmic engineering, hybridization with traditional MIP concepts, and close integration with the CPLEX solver have enabled our method to outperform baselines on MIPLIB2017 instances, finding backdoors more frequently and more efficiently.
LTL2Action: Generalizing LTL Instructions for Multi-Task RL
Feb 25, 2021



We address the problem of teaching a deep reinforcement learning (RL) agent to follow instructions in multi-task environments. The combinatorial task sets we target consist of up to $~10^{39}$ unique tasks. We employ a well-known formal language -- linear temporal logic (LTL) -- to specify instructions, using a domain-specific vocabulary. We propose a novel approach to learning that exploits the compositional syntax and the semantics of LTL, enabling our RL agent to learn task-conditioned policies that generalize to new instructions, not observed during training. The expressive power of LTL supports the specification of a diversity of complex temporally extended behaviours that include conditionals and alternative realizations. To reduce the overhead of learning LTL semantics, we introduce an environment-agnostic LTL pretraining scheme which improves sample-efficiency in downstream environments. Experiments on discrete and continuous domains demonstrate the strength of our approach in learning to solve (unseen) tasks, given LTL instructions.
Learning Branching Heuristics for Propositional Model Counting
Jul 07, 2020
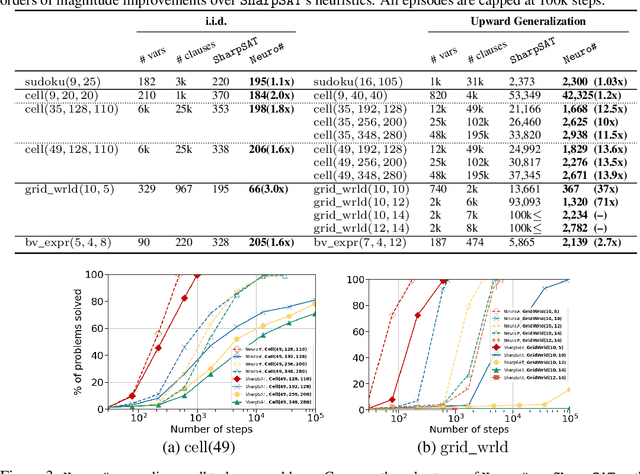
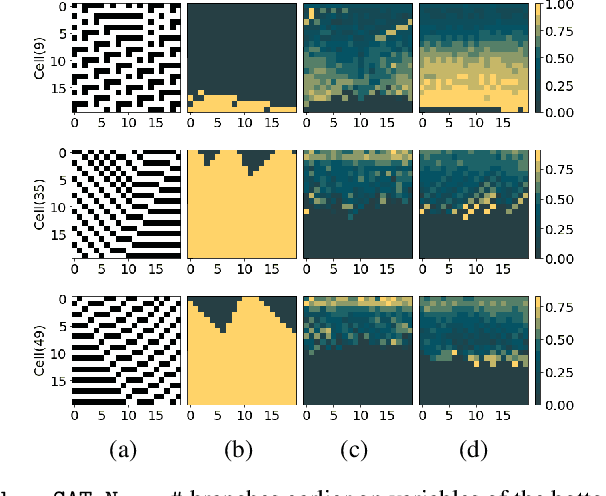

Propositional model counting or #SAT is the problem of computing the number of satisfying assignments of a Boolean formula and many discrete probabilistic inference problems can be translated into a model counting problem to be solved by #SAT solvers. Generic ``exact'' #SAT solvers, however, are often not scalable to industrial-level instances. In this paper, we present Neuro#, an approach for learning branching heuristics for exact #SAT solvers via evolution strategies (ES) to reduce the number of branching steps the solver takes to solve an instance. We experimentally show that our approach not only reduces the step count on similarly distributed held-out instances but it also generalizes to much larger instances from the same problem family. The gap between the learned and the vanilla solver on larger instances is sometimes so wide that the learned solver can even overcome the run time overhead of querying the model and beat the vanilla in wall-clock time by orders of magnitude.
Lifted Unit Propagation for Effective Grounding
Sep 06, 2011



A grounding of a formula $\phi$ over a given finite domain is a ground formula which is equivalent to $\phi$ on that domain. Very effective propositional solvers have made grounding-based methods for problem solving increasingly important, however for realistic problem domains and instances, the size of groundings is often problematic. A key technique in ground (e.g., SAT) solvers is unit propagation, which often significantly reduces ground formula size even before search begins. We define a "lifted" version of unit propagation which may be carried out prior to grounding, and describe integration of the resulting technique into grounding algorithms. We describe an implementation of the method in a bottom-up grounder, and an experimental study of its performance.