 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePatricio A. Vela
Hierarchical Experience-informed Navigation for Multi-modal Quadrupedal Rebar Grid Traversal
Nov 14, 2023
This study focuses on a layered, experience-based, multi-modal contact planning framework for agile quadrupedal locomotion over a constrained rebar environment. To this end, our hierarchical planner incorporates locomotion-specific modules into the high-level contact sequence planner and solves kinodynamically-aware trajectory optimization as the low-level motion planner. Through quantitative analysis of the experience accumulation process and experimental validation of the kinodynamic feasibility of the generated locomotion trajectories, we demonstrate that the experience planning heuristic offers an effective way of providing candidate footholds for a legged contact planner. Additionally, we introduce a guiding torso path heuristic at the global planning level to enhance the navigation success rate in the presence of environmental obstacles. Our results indicate that the torso-path guided experience accumulation requires significantly fewer offline trials to successfully reach the goal compared to regular experience accumulation. Finally, our planning framework is validated in both dynamics simulations and real hardware implementations on a quadrupedal robot provided by Skymul Inc.
Multi-gait Locomotion Planning and Tracking for Tendon-actuated Terrestrial Soft Robot (TerreSoRo)
Jul 31, 2023
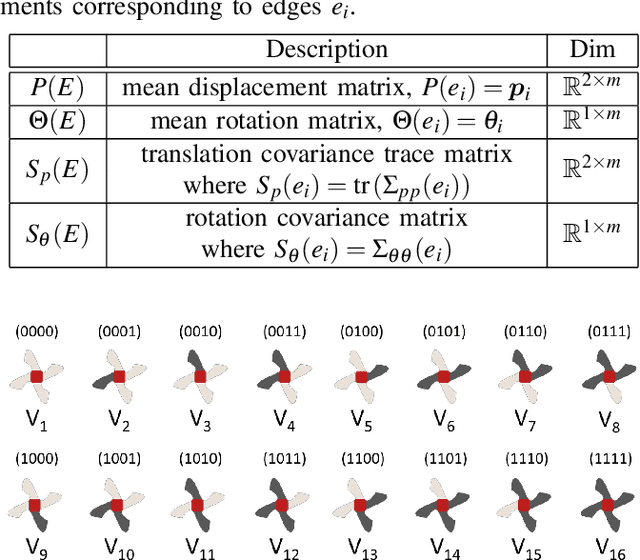
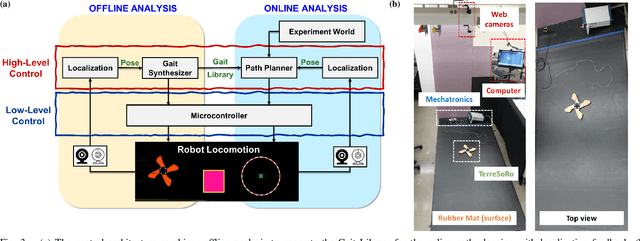
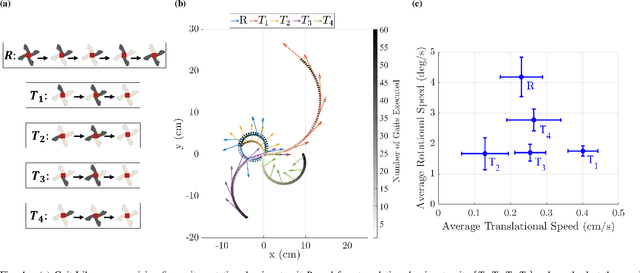
The adaptability of soft robots makes them ideal candidates to maneuver through unstructured environments. However, locomotion challenges arise due to complexities in modeling the body mechanics, actuation, and robot-environment dynamics. These factors contribute to the gap between their potential and actual autonomous field deployment. A closed-loop path planning framework for soft robot locomotion is critical to close the real-world realization gap. This paper presents a generic path planning framework applied to TerreSoRo (Tetra-Limb Terrestrial Soft Robot) with pose feedback. It employs a gait-based, lattice trajectory planner to facilitate navigation in the presence of obstacles. The locomotion gaits are synthesized using a data-driven optimization approach that allows for learning from the environment. The trajectory planner employs a greedy breadth-first search strategy to obtain a collision-free trajectory. The synthesized trajectory is a sequence of rotate-then-translate gait pairs. The control architecture integrates high-level and low-level controllers with real-time localization (using an overhead webcam). TerreSoRo successfully navigates environments with obstacles where path re-planning is performed. To best of our knowledge, this is the first instance of real-time, closed-loop path planning of a non-pneumatic soft robot.
Planning with Sequence Models through Iterative Energy Minimization
Mar 28, 2023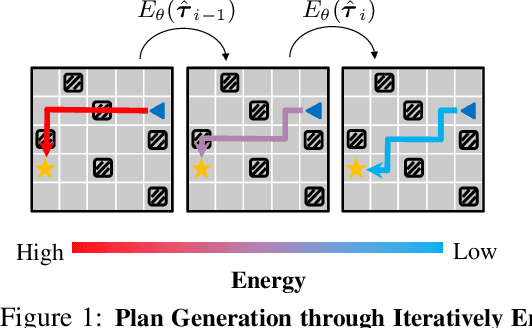
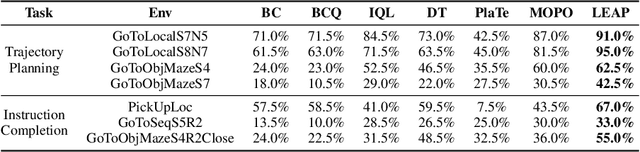
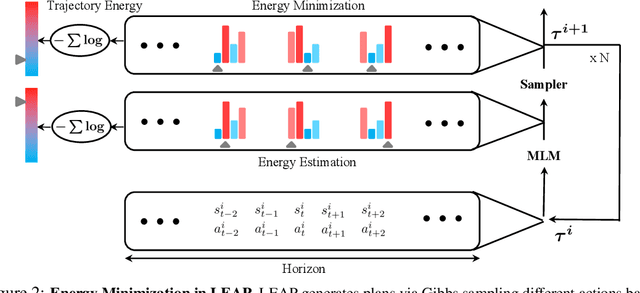
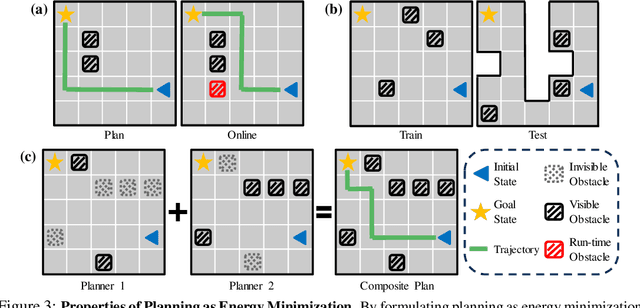
Recent works have shown that sequence modeling can be effectively used to train reinforcement learning (RL) policies. However, the success of applying existing sequence models to planning, in which we wish to obtain a trajectory of actions to reach some goal, is less straightforward. The typical autoregressive generation procedures of sequence models preclude sequential refinement of earlier steps, which limits the effectiveness of a predicted plan. In this paper, we suggest an approach towards integrating planning with sequence models based on the idea of iterative energy minimization, and illustrate how such a procedure leads to improved RL performance across different tasks. We train a masked language model to capture an implicit energy function over trajectories of actions, and formulate planning as finding a trajectory of actions with minimum energy. We illustrate how this procedure enables improved performance over recent approaches across BabyAI and Atari environments. We further demonstrate unique benefits of our iterative optimization procedure, involving new task generalization, test-time constraints adaptation, and the ability to compose plans together. Project website: https://hychen-naza.github.io/projects/LEAP
Safe Hierarchical Navigation in Crowded Dynamic Uncertain Environments
Mar 24, 2023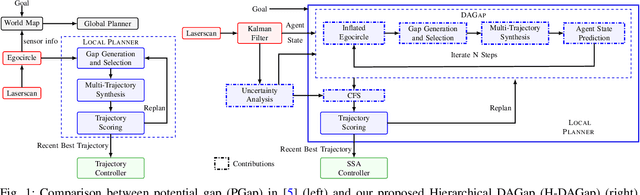
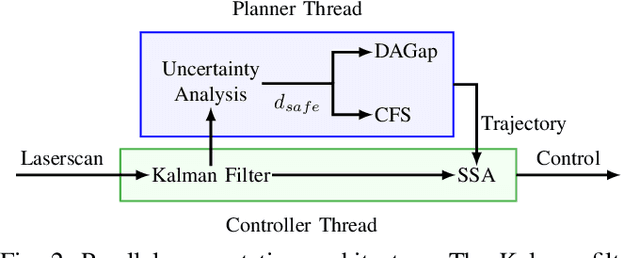
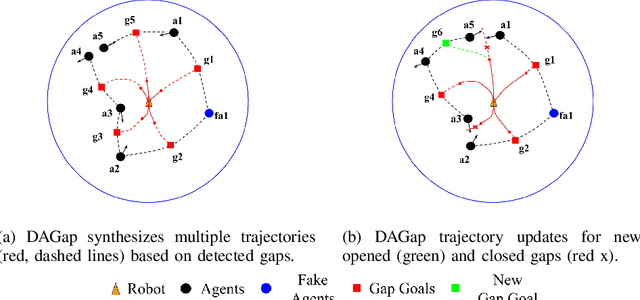
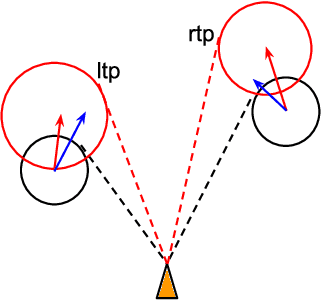
This paper describes a hierarchical solution consisting of a multi-phase planner and a low-level safe controller to jointly solve the safe navigation problem in crowded, dynamic, and uncertain environments. The planner employs dynamic gap analysis and trajectory optimization to achieve collision avoidance with respect to the predicted trajectories of dynamic agents within the sensing and planning horizon and with robustness to agent uncertainty. To address uncertainty over the planning horizon and real-time safety, a fast reactive safe set algorithm (SSA) is adopted, which monitors and modifies the unsafe control during trajectory tracking. Compared to other existing methods, our approach offers theoretical guarantees of safety and achieves collision-free navigation with higher probability in uncertain environments, as demonstrated in scenarios with 20 and 50 dynamic agents. Project website: https://hychen-naza.github.io/projects/HDAGap/.
WDiscOOD: Out-of-Distribution Detection via Whitened Linear Discriminant Analysis
Mar 22, 2023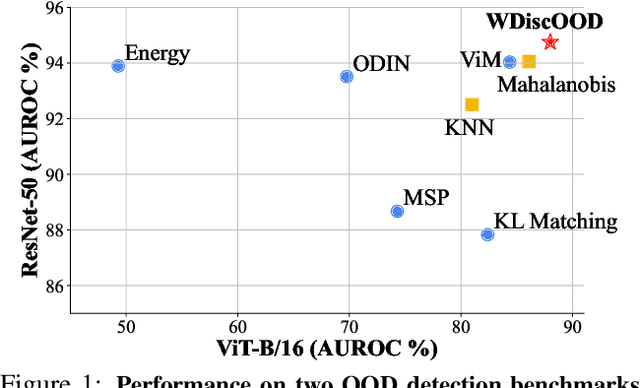
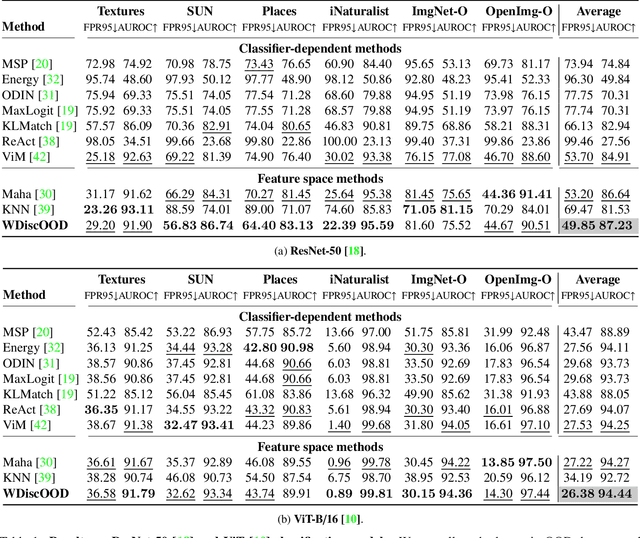
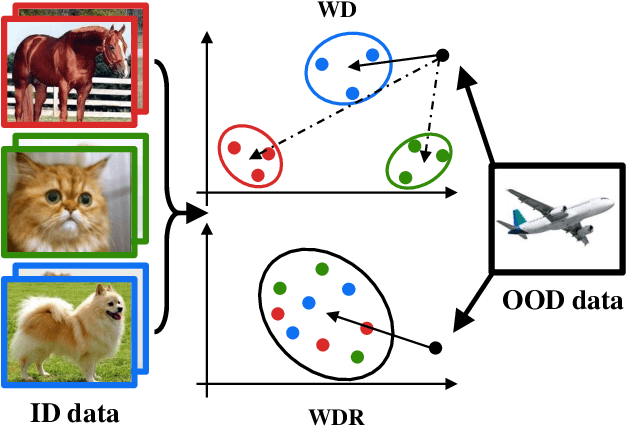
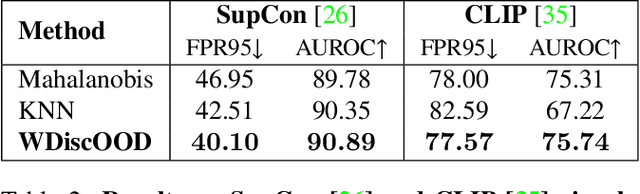
Deep neural networks are susceptible to generating overconfident yet erroneous predictions when presented with data beyond known concepts. This challenge underscores the importance of detecting out-of-distribution (OOD) samples in the open world. In this work, we propose a novel feature-space OOD detection score that jointly reasons with both class-specific and class-agnostic information. Specifically, our approach utilizes Whitened Linear Discriminant Analysis to project features into two subspaces - the discriminative and residual subspaces - in which the ID classes are maximally separated and closely clustered, respectively. The OOD score is then determined by combining the deviation from the input data to the ID distribution in both subspaces. The efficacy of our method, named WDiscOOD, is verified on the large-scale ImageNet-1k benchmark, with six OOD datasets that covers a variety of distribution shifts. WDiscOOD demonstrates superior performance on deep classifiers with diverse backbone architectures, including CNN and vision transformer. Furthermore, we also show that our method can more effectively detect novel concepts in representation space trained with contrastive objectives, including supervised contrastive loss and multi-modality contrastive loss.
KGNv2: Separating Scale and Pose Prediction for Keypoint-based 6-DoF Grasp Synthesis on RGB-D input
Mar 16, 2023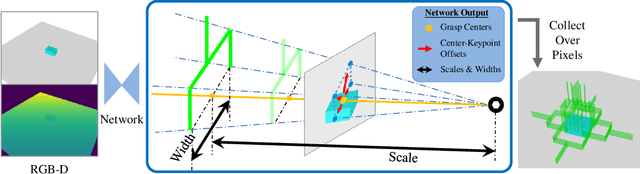
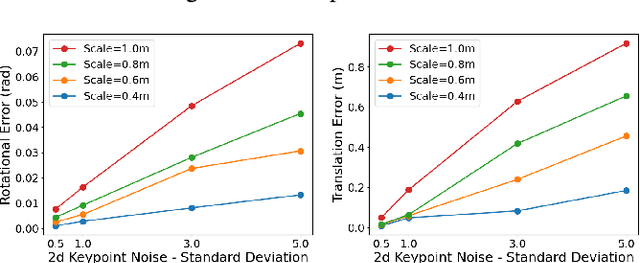
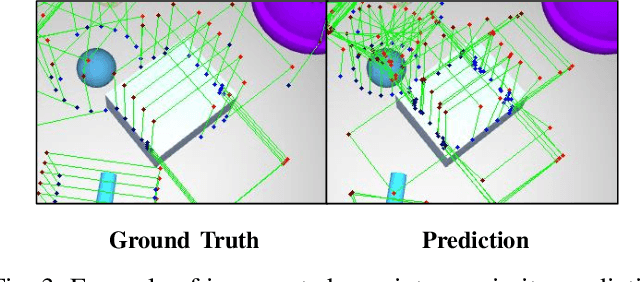
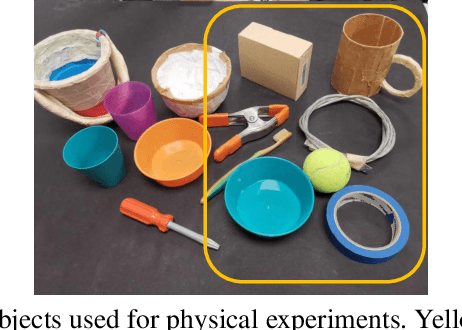
We propose a new 6-DoF grasp pose synthesis approach from 2D/2.5D input based on keypoints. Keypoint-based grasp detector from image input has demonstrated promising results in the previous study, where the additional visual information provided by color images compensates for the noisy depth perception. However, it relies heavily on accurately predicting the location of keypoints in the image space. In this paper, we devise a new grasp generation network that reduces the dependency on precise keypoint estimation. Given an RGB-D input, our network estimates both the grasp pose from keypoint detection as well as scale towards the camera. We further re-design the keypoint output space in order to mitigate the negative impact of keypoint prediction noise to Perspective-n-Point (PnP) algorithm. Experiments show that the proposed method outperforms the baseline by a large margin, validating the efficacy of our approach. Finally, despite trained on simple synthetic objects, our method demonstrate sim-to-real capacity by showing competitive results in real-world robot experiments.
Safer Gap: A Gap-based Local Planner for Safe Navigation with Nonholonomic Mobile Robots
Mar 14, 2023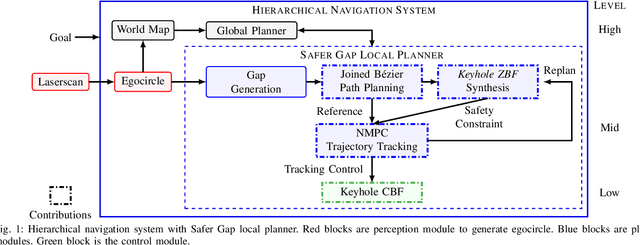
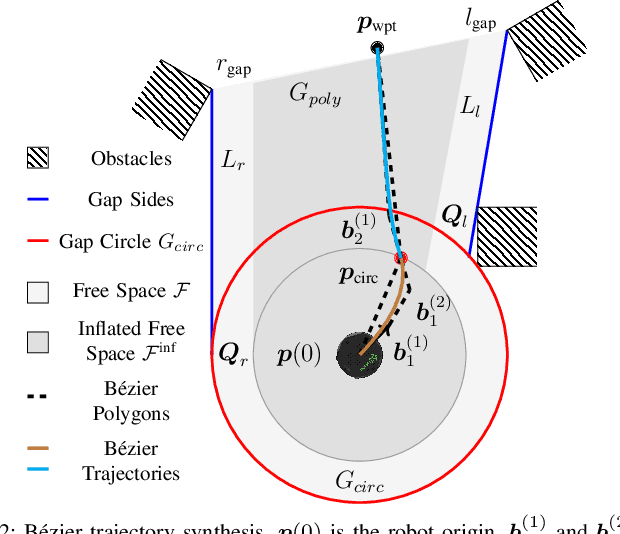
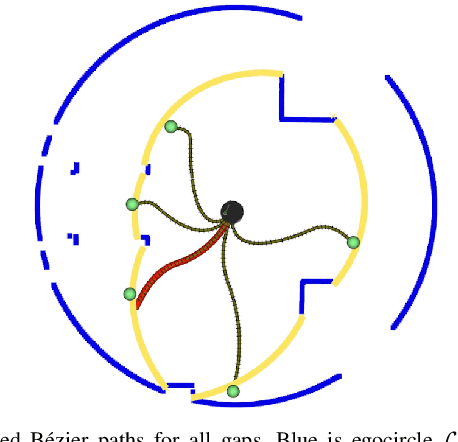
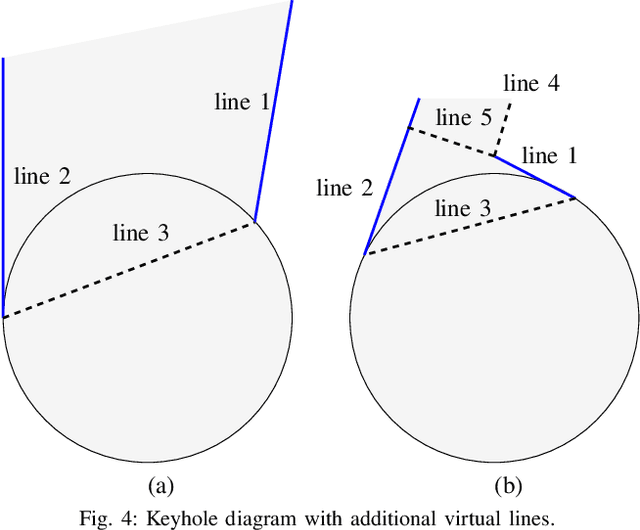
This paper extends the gap-based navigation technique in Potential Gap by guaranteeing safety for nonholonomic robots for all tiers of the local planner hierarchy, so called Safer Gap. The first tier generates a Bezier-based collision-free path through gaps. A subset of navigable free-space from the robot through a gap, called the keyhole, is defined to be the union of the largest collision-free disc centered on the robot and a trapezoidal region directed through the gap. It is encoded by a shallow neural network zeroing barrier function (ZBF). Nonlinear model predictive control (NMPC), with Keyhole ZBF constraints and output tracking of the Bezier path, synthesizes a safe kinematically-feasible trajectory. Low-level use of the Keyhole ZBF within a point-wise optimization-based safe control synthesis module serves as a final safety layer. Simulation and experimental validation of Safer Gap confirm its collision-free navigation properties.
Zero-Shot Object Searching Using Large-scale Object Relationship Prior
Mar 10, 2023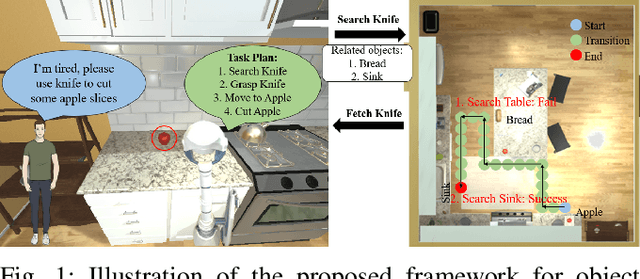
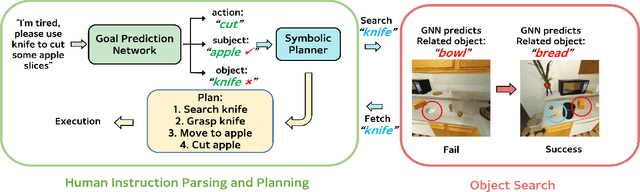

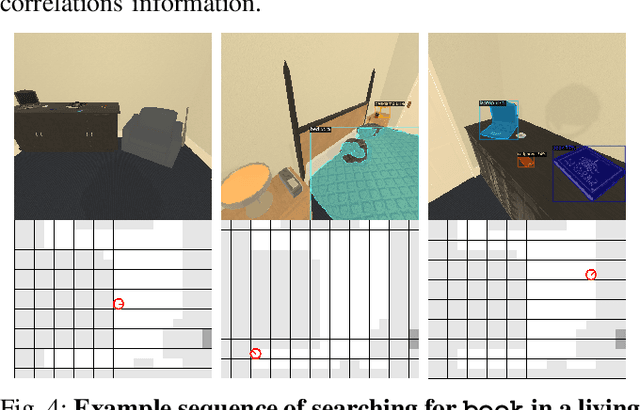
Home-assistant robots have been a long-standing research topic, and one of the biggest challenges is searching for required objects in housing environments. Previous object-goal navigation requires the robot to search for a target object category in an unexplored environment, which may not be suitable for home-assistant robots that typically have some level of semantic knowledge of the environment, such as the location of static furniture. In our approach, we leverage this knowledge and the fact that a target object may be located close to its related objects for efficient navigation. To achieve this, we train a graph neural network using the Visual Genome dataset to learn the object co-occurrence relationships and formulate the searching process as iteratively predicting the possible areas where the target object may be located. This approach is entirely zero-shot, meaning it doesn't require new accurate object correlation in the test environment. We empirically show that our method outperforms prior correlational object search algorithms. As our ultimate goal is to build fully autonomous assistant robots for everyday use, we further integrate the task planner for parsing natural language and generating task-completing plans with object navigation to execute human instructions. We demonstrate the effectiveness of our proposed pipeline in both the AI2-THOR simulator and a Stretch robot in a real-world environment.
Parallel Inversion of Neural Radiance Fields for Robust Pose Estimation
Oct 18, 2022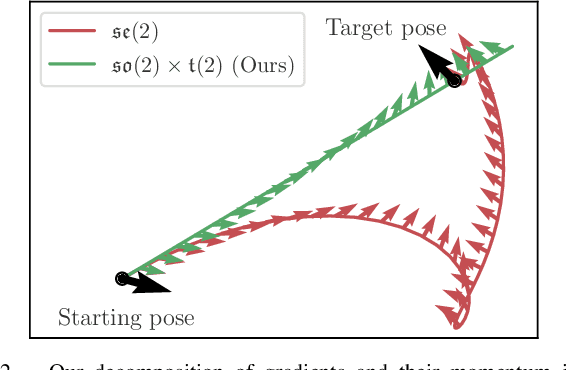
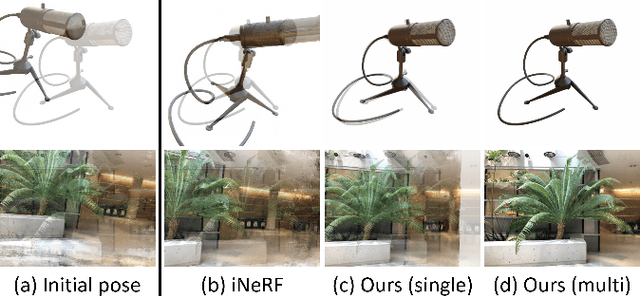
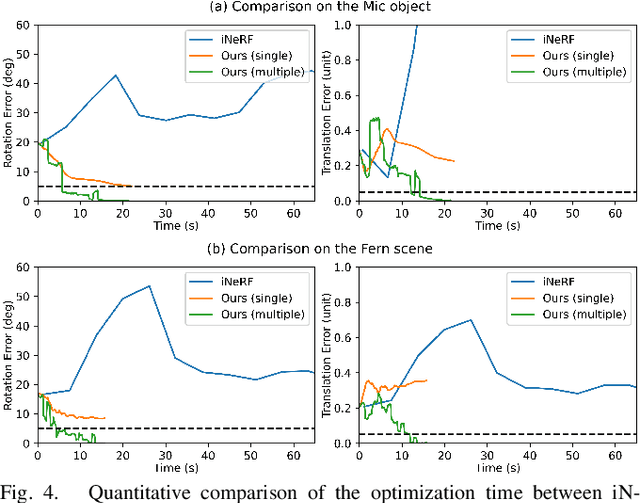
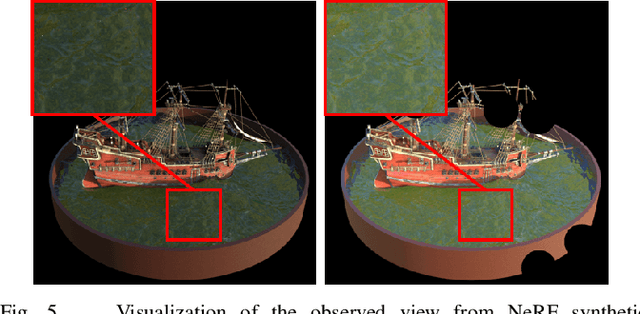
We present a parallelized optimization method based on fast Neural Radiance Fields (NeRF) for estimating 6-DoF target poses. Given a single observed RGB image of the target, we can predict the translation and rotation of the camera by minimizing the residual between pixels rendered from a fast NeRF model and pixels in the observed image. We integrate a momentum-based camera extrinsic optimization procedure into Instant Neural Graphics Primitives, a recent exceptionally fast NeRF implementation. By introducing parallel Monte Carlo sampling into the pose estimation task, our method overcomes local minima and improves efficiency in a more extensive search space. We also show the importance of adopting a more robust pixel-based loss function to reduce error. Experiments demonstrate that our method can achieve improved generalization and robustness on both synthetic and real-world benchmarks.
Geometry of Radial Basis Neural Networks for Safety Biased Approximation of Unsafe Regions
Oct 11, 2022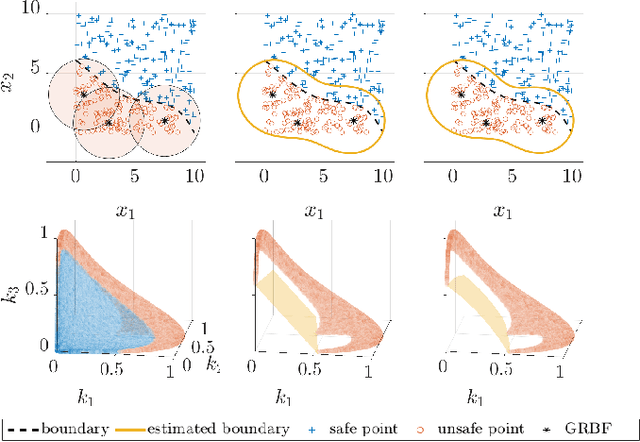
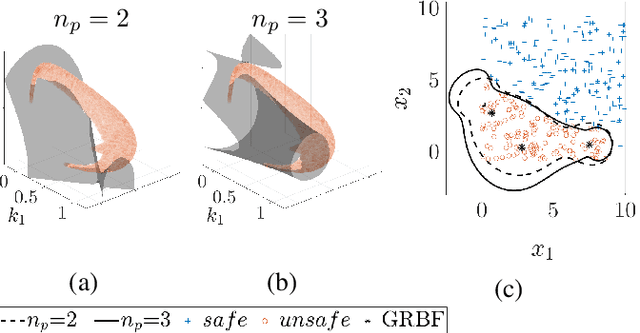

Barrier function-based inequality constraints are a means to enforce safety specifications for control systems. When used in conjunction with a convex optimization program, they provide a computationally efficient method to enforce safety for the general class of control-affine systems. One of the main assumptions when taking this approach is the a priori knowledge of the barrier function itself, i.e., knowledge of the safe set. In the context of navigation through unknown environments where the locally safe set evolves with time, such knowledge does not exist. This manuscript focuses on the synthesis of a zeroing barrier function characterizing the safe set based on safe and unsafe sample measurements, e.g., from perception data in navigation applications. Prior work formulated a supervised machine learning algorithm whose solution guaranteed the construction of a zeroing barrier function with specific level-set properties. However, it did not explore the geometry of the neural network design used for the synthesis process. This manuscript describes the specific geometry of the neural network used for zeroing barrier function synthesis, and shows how the network provides the necessary representation for splitting the state space into safe and unsafe regions.