 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePetros Boufounos
Mutual Interference Mitigation for MIMO-FMCW Automotive Radar
Apr 06, 2023
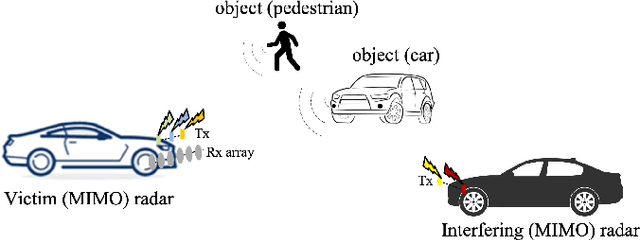
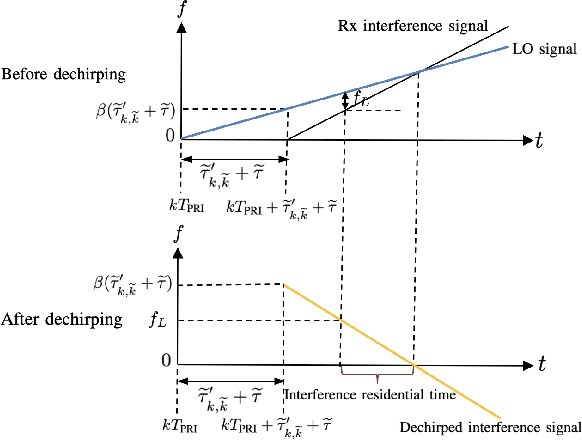

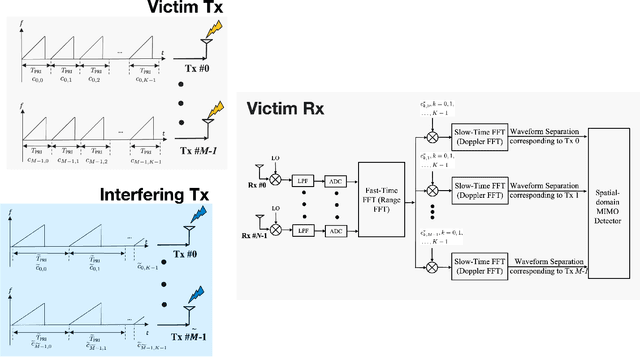
This paper considers mutual interference mitigation among automotive radars using frequency-modulated continuous wave (FMCW) signal and multiple-input multiple-output (MIMO) virtual arrays. For the first time, we derive a general interference signal model that fully accounts for not only the time-frequency incoherence, e.g., different FMCW configuration parameters and time offsets, but also the slow-time code MIMO incoherence and array configuration differences between the victim and interfering radars. Along with a standard MIMO-FMCW object signal model, we turn the interference mitigation into a spatial-domain object detection under incoherent MIMO-FMCW interference described by the explicit interference signal model, and propose a constant false alarm rate (CFAR) detector. More specifically, the proposed detector exploits the structural property of the derived interference model at both \emph{transmit} and \emph{receive} steering vector space. We also derive analytical closed-form expressions for probabilities of detection and false alarm. Performance evaluation using both synthetic-level and phased array system-level simulation confirms the effectiveness of our proposed detector over selected baseline methods.
Greedy Sparsity-Constrained Optimization
Jan 06, 2013Sparsity-constrained optimization has wide applicability in machine learning, statistics, and signal processing problems such as feature selection and compressive Sensing. A vast body of work has studied the sparsity-constrained optimization from theoretical, algorithmic, and application aspects in the context of sparse estimation in linear models where the fidelity of the estimate is measured by the squared error. In contrast, relatively less effort has been made in the study of sparsity-constrained optimization in cases where nonlinear models are involved or the cost function is not quadratic. In this paper we propose a greedy algorithm, Gradient Support Pursuit (GraSP), to approximate sparse minima of cost functions of arbitrary form. Should a cost function have a Stable Restricted Hessian (SRH) or a Stable Restricted Linearization (SRL), both of which are introduced in this paper, our algorithm is guaranteed to produce a sparse vector within a bounded distance from the true sparse optimum. Our approach generalizes known results for quadratic cost functions that arise in sparse linear regression and Compressive Sensing. We also evaluate the performance of GraSP through numerical simulations on synthetic data, where the algorithm is employed for sparse logistic regression with and without $\ell_2$-regularization.