 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQingxiang Zhao
Design and Visual Servoing Control of a Hybrid Dual-Segment Flexible Neurosurgical Robot for Intraventricular Biopsy
Feb 23, 2024
Traditional rigid endoscopes have challenges in flexibly treating tumors located deep in the brain, and low operability and fixed viewing angles limit its development. This study introduces a novel dual-segment flexible robotic endoscope MicroNeuro, designed to perform biopsies with dexterous surgical manipulation deep in the brain. Taking into account the uncertainty of the control model, an image-based visual servoing with online robot Jacobian estimation has been implemented to enhance motion accuracy. Furthermore, the application of model predictive control with constraints significantly bolsters the flexible robot's ability to adaptively track mobile objects and resist external interference. Experimental results underscore that the proposed control system enhances motion stability and precision. Phantom testing substantiates its considerable potential for deployment in neurosurgery.
Constrained Motion Planning of A Cable-Driven Soft Robot With Compressible Curvature Modeling
Jun 15, 2021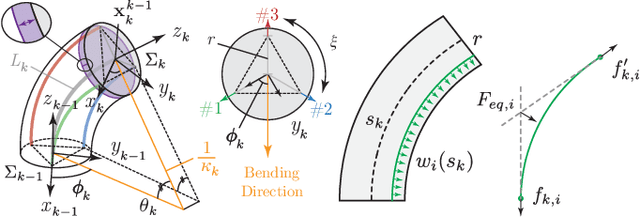
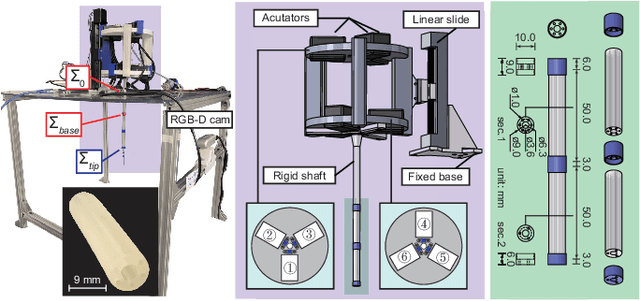
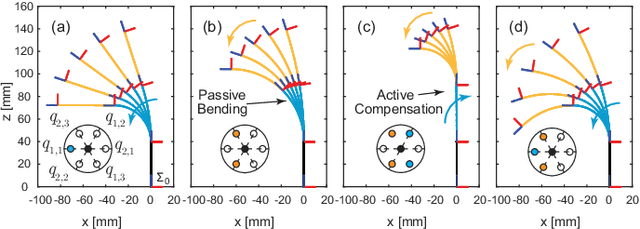
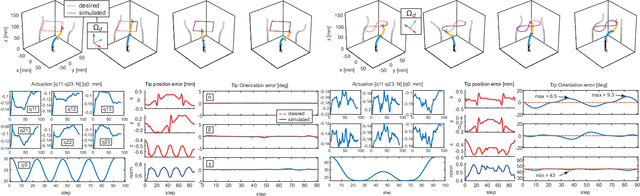
A cable-driven soft-bodied robot with redundancy can conduct the trajectory tracking task and in the meanwhile fulfill some extra constraints, such as tracking through an end-effector in designated orientation, or get rid of the evitable manipulator-obstacle collision. Those constraints require rational planning of the robot motion. In this work, we derived the compressible curvature kinematics of a cable-driven soft robot which takes the compressible soft segment into account. The motion planning of the soft robot for a trajectory tracking task in constrained conditions, including fixed orientation end-effector and manipulator-obstacle collision avoidance, has been investigated. The inverse solution of cable actuation was formulated as a damped least-square optimization problem and iteratively computed off-line. The performance of trajectory tracking and the obedience to constraints were evaluated via the simulation we made open-source, as well as the prototype experiments. The method can be generalized to the similar multisegment cable-driven soft robotic systems by customizing the robot parameters for the prior motion planning of the manipulator.