 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRebecca Kramer-Bottiglio
Gradient-based Design of Computational Granular Crystals
Apr 07, 2024
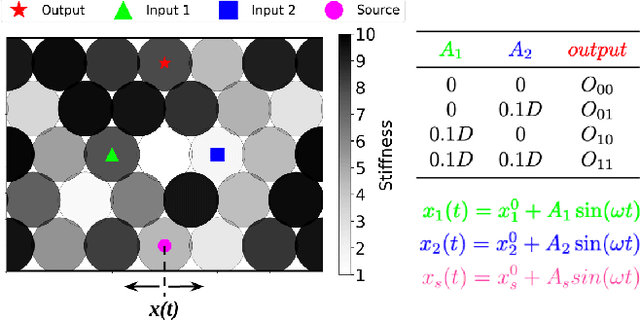
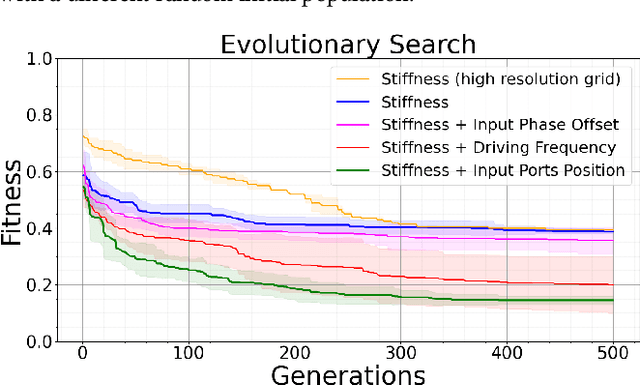
There is growing interest in engineering unconventional computing devices that leverage the intrinsic dynamics of physical substrates to perform fast and energy-efficient computations. Granular metamaterials are one such substrate that has emerged as a promising platform for building wave-based information processing devices with the potential to integrate sensing, actuation, and computation. Their high-dimensional and nonlinear dynamics result in nontrivial and sometimes counter-intuitive wave responses that can be shaped by the material properties, geometry, and configuration of individual grains. Such highly tunable rich dynamics can be utilized for mechanical computing in special-purpose applications. However, there are currently no general frameworks for the inverse design of large-scale granular materials. Here, we build upon the similarity between the spatiotemporal dynamics of wave propagation in material and the computational dynamics of Recurrent Neural Networks to develop a gradient-based optimization framework for harmonically driven granular crystals. We showcase how our framework can be utilized to design basic logic gates where mechanical vibrations carry the information at predetermined frequencies. We compare our design methodology with classic gradient-free methods and find that our approach discovers higher-performing configurations with less computational effort. Our findings show that a gradient-based optimization method can greatly expand the design space of metamaterials and provide the opportunity to systematically traverse the parameter space to find materials with the desired functionalities.
Universal Mechanical Polycomputation in Granular Matter
May 29, 2023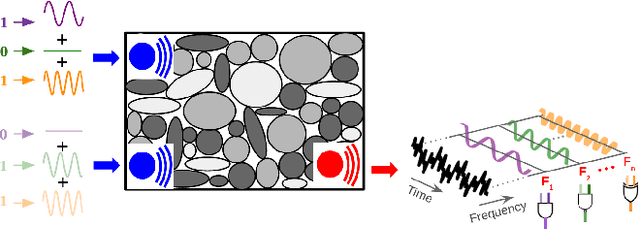

Unconventional computing devices are increasingly of interest as they can operate in environments hostile to silicon-based electronics, or compute in ways that traditional electronics cannot. Mechanical computers, wherein information processing is a material property emerging from the interaction of components with the environment, are one such class of devices. This information processing can be manifested in various physical substrates, one of which is granular matter. In a granular assembly, vibration can be treated as the information-bearing mode. This can be exploited to realize "polycomputing": materials can be evolved such that a single grain within them can report the result of multiple logical operations simultaneously at different frequencies, without recourse to quantum effects. Here, we demonstrate the evolution of a material in which one grain acts simultaneously as two different NAND gates at two different frequencies. NAND gates are of interest as any logical operations can be built from them. Moreover, they are nonlinear thus demonstrating a step toward general-purpose, computationally dense mechanical computers. Polycomputation was found to be distributed across each evolved material, suggesting the material's robustness. With recent advances in material sciences, hardware realization of these materials may eventually provide devices that challenge the computational density of traditional computers.
Real2Sim2Real Transfer for Control of Cable-driven Robots via a Differentiable Physics Engine
Sep 20, 2022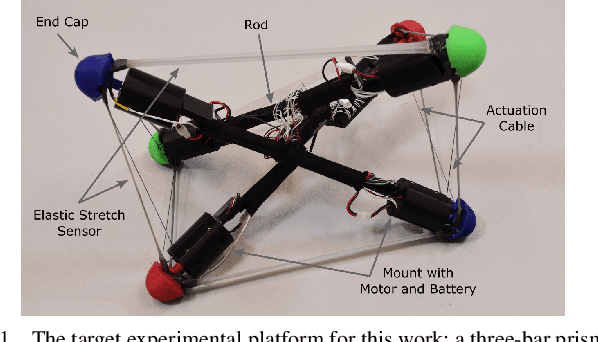
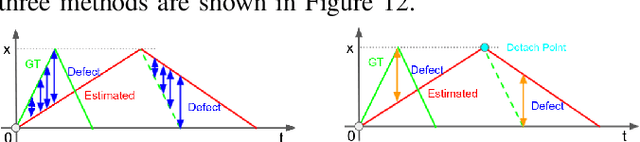
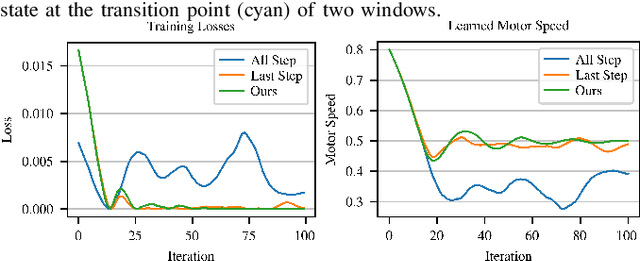
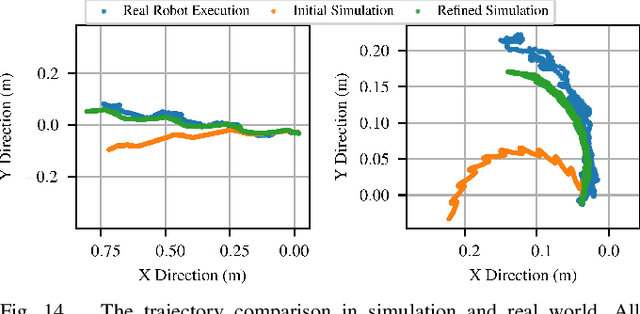
Tensegrity robots, composed of rigid rods and flexible cables, exhibit high strength-to-weight ratios and extreme deformations, enabling them to navigate unstructured terrain and even survive harsh impacts. However, they are hard to control due to their high dimensionality, complex dynamics, and coupled architecture. Physics-based simulation is one avenue for developing locomotion policies that can then be transferred to real robots, but modeling tensegrity robots is a complex task, so simulations experience a substantial sim2real gap. To address this issue, this paper describes a Real2Sim2Real strategy for tensegrity robots. This strategy is based on a differential physics engine that can be trained given limited data from a real robot (i.e. offline measurements and one random trajectory) and achieve a high enough accuracy to discover transferable locomotion policies. Beyond the overall pipeline, key contributions of this work include computing non-zero gradients at contact points, a loss function, and a trajectory segmentation technique that avoid conflicts in gradient evaluation during training. The proposed pipeline is demonstrated and evaluated on a real 3-bar tensegrity robot.
6N-DoF Pose Tracking for Tensegrity Robots
May 29, 2022
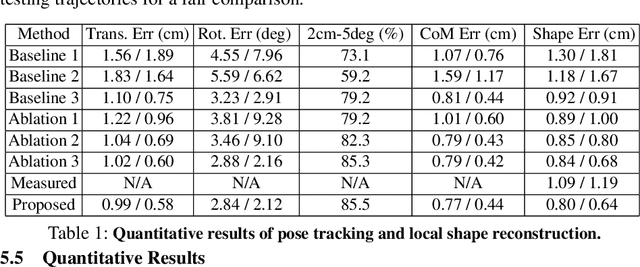
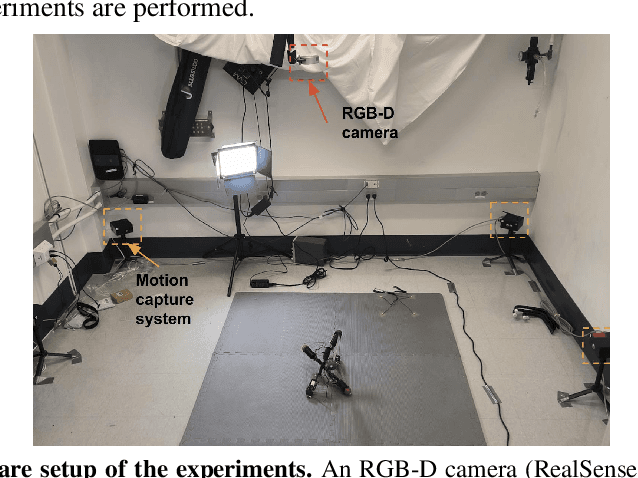
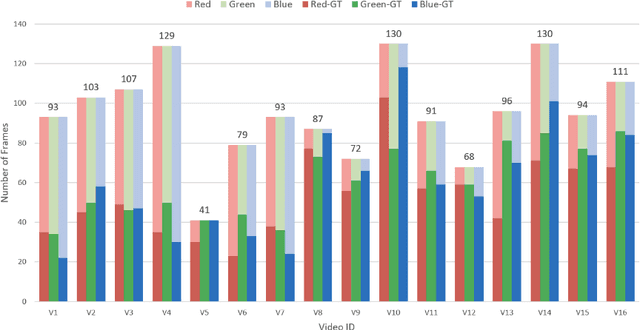
Tensegrity robots, which are composed of rigid compressive elements (rods) and flexible tensile elements (e.g., cables), have a variety of advantages, including flexibility, light weight, and resistance to mechanical impact. Nevertheless, the hybrid soft-rigid nature of these robots also complicates the ability to localize and track their state. This work aims to address what has been recognized as a grand challenge in this domain, i.e., the pose tracking of tensegrity robots through a markerless, vision-based method, as well as novel, onboard sensors that can measure the length of the robot's cables. In particular, an iterative optimization process is proposed to estimate the 6-DoF poses of each rigid element of a tensegrity robot from an RGB-D video as well as endcap distance measurements from the cable sensors. To ensure the pose estimates of rigid elements are physically feasible, i.e., they are not resulting in collisions between rods or with the environment, physical constraints are introduced during the optimization. Real-world experiments are performed with a 3-bar tensegrity robot, which performs locomotion gaits. Given ground truth data from a motion capture system, the proposed method achieves less than 1 cm translation error and 3 degrees rotation error, which significantly outperforms alternatives. At the same time, the approach can provide pose estimates throughout the robot's motion, while motion capture often fails due to occlusions.
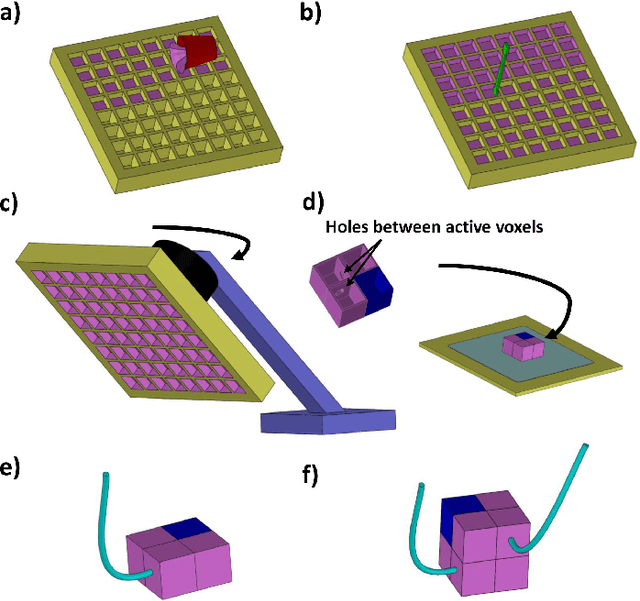
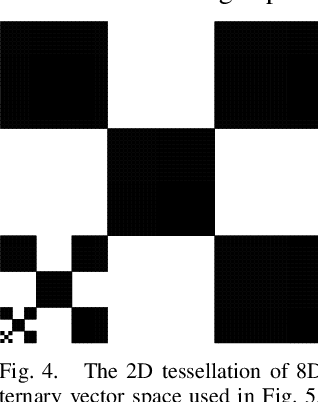
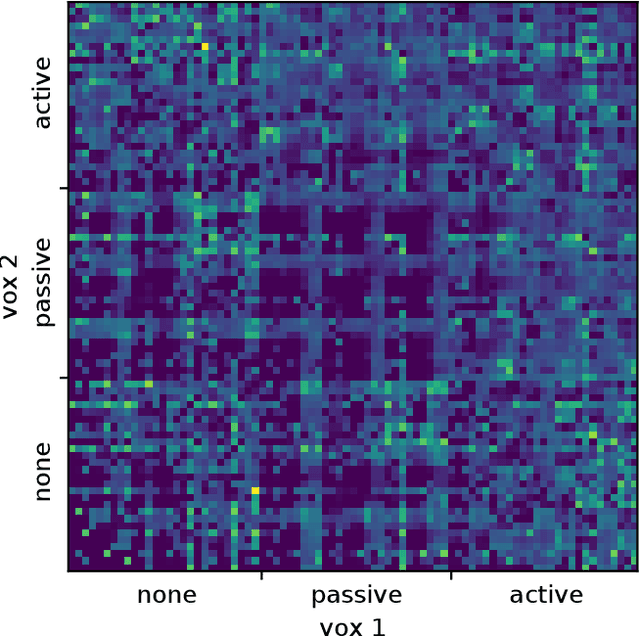
Evolving Programmable Computational Metamaterials
Apr 19, 2022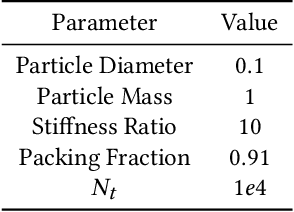
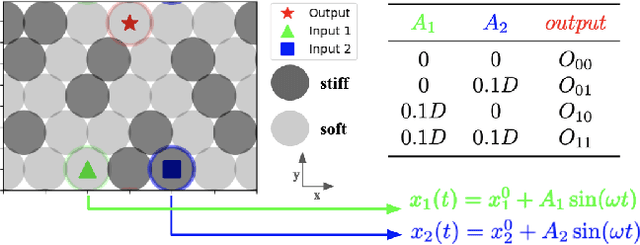

Granular metamaterials are a promising choice for the realization of mechanical computing devices. As preliminary evidence of this, we demonstrate here how to embed Boolean logic gates (AND and XOR) into a granular metamaterial by evolving where particular grains are placed in the material. Our results confirm the existence of gradients of increasing "AND-ness" and "XOR-ness" within the space of possible materials that can be followed by evolutionary search. We measure the computational functionality of a material by probing how it transforms bits encoded as vibrations with zero or non-zero amplitude. We compared the evolution of materials built from mass-contrasting particles and materials built from stiffness-contrasting particles, and found that the latter were more evolvable. We believe this work may pave the way toward evolutionary design of increasingly sophisticated, programmable, and computationally dense metamaterials with certain advantages over more traditional computational substrates.
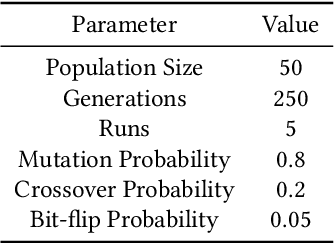
Soft Lattice Modules that Behave Independently and Collectively
Oct 21, 2021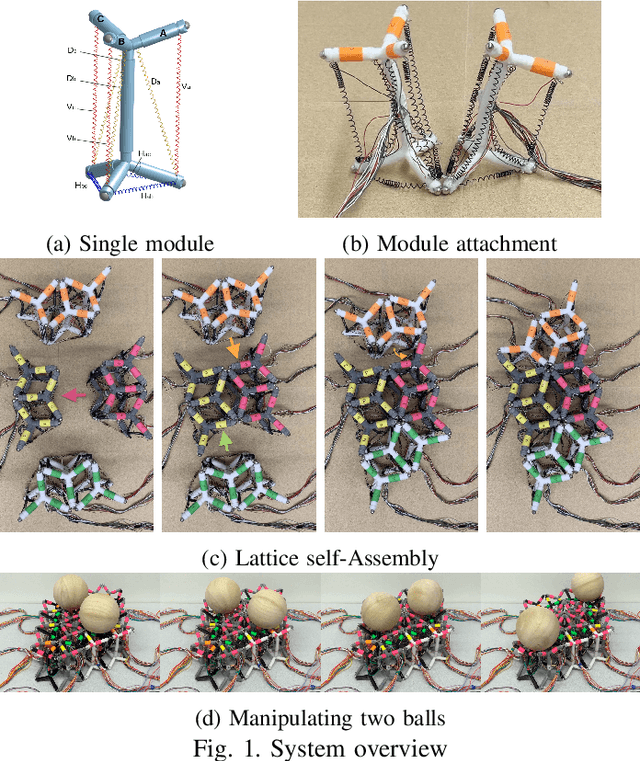
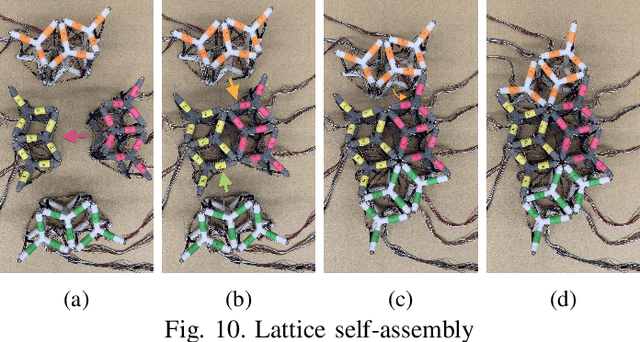

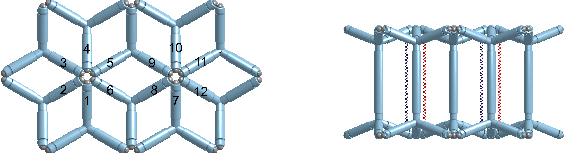
Natural systems integrate the work of many sub-units (cells) toward a large-scale unified goal (morphological and behavioral), which can counteract the effects of unexpected experiences, damage, or simply changes in tasks demands. In this paper, we exploit the opportunities presented by soft, modular, and tensegrity robots to introduce soft lattice modules that parallel the sub-units seen in biological systems. The soft lattice modules are comprised of 3D printed plastic "skeletons", linear contracting shape memory alloy spring actuators, and permanent magnets that enable adhesion between modules. The soft lattice modules are capable of independent locomotion, and can also join with other modules to achieve collective, self-assembled, larger scale tasks such as collective locomotion and moving an object across the surface of the lattice assembly. This work represents a preliminary step toward soft modular systems capable of independent and collective behaviors, and provide a platform for future studies on distributed control.
Scale invariant robot behavior with fractals
Mar 08, 2021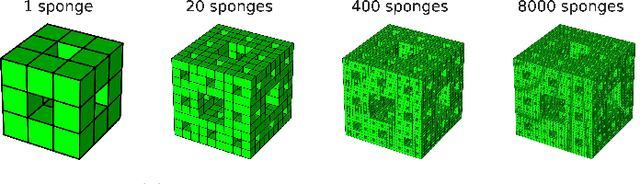
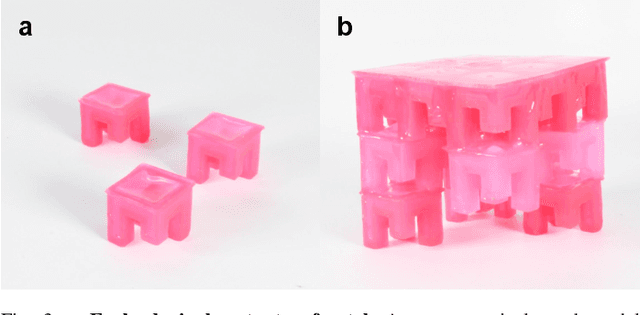
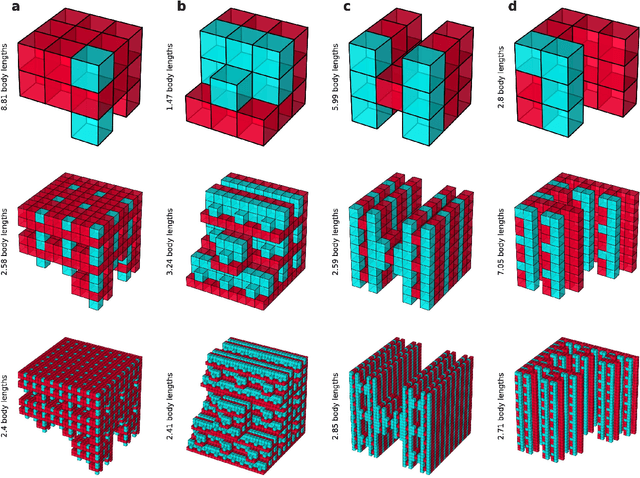
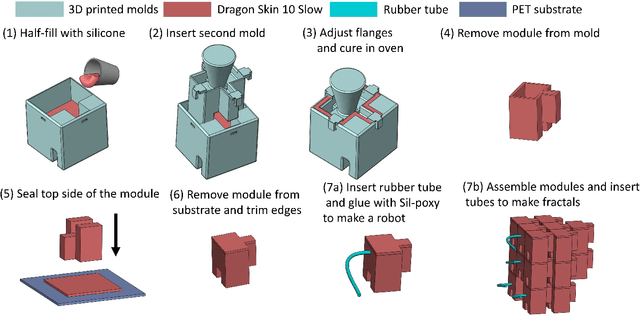
Robots deployed at orders of magnitude different size scales, and that retain the same desired behavior at any of those scales, would greatly expand the environments in which the robots could operate. However it is currently not known whether such robots exist, and, if they do, how to design them. Since self similar structures in nature often exhibit self similar behavior at different scales, we hypothesize that there may exist robot designs that have the same property. Here we demonstrate that this is indeed the case for some, but not all, modular soft robots: there are robot designs that exhibit a desired behavior at a small size scale, and if copies of that robot are attached together to realize the same design at higher scales, those larger robots exhibit similar behavior. We show how to find such designs in simulation using an evolutionary algorithm. Further, when fractal attachment is not assumed and attachment geometries must thus be evolved along with the design of the base robot unit, scale invariant behavior is not achieved, demonstrating that structural self similarity, when combined with appropriate designs, is a useful path to realizing scale invariant robot behavior. We validate our findings by demonstrating successful transferal of self similar structure and behavior to pneumatically-controlled soft robots. Finally, we show that biobots can spontaneously exhibit self similar attachment geometries, thereby suggesting that self similar behavior via self similar structure may be realizable across a wide range of robot platforms in future.
Gaining environments through shape change
Aug 14, 2020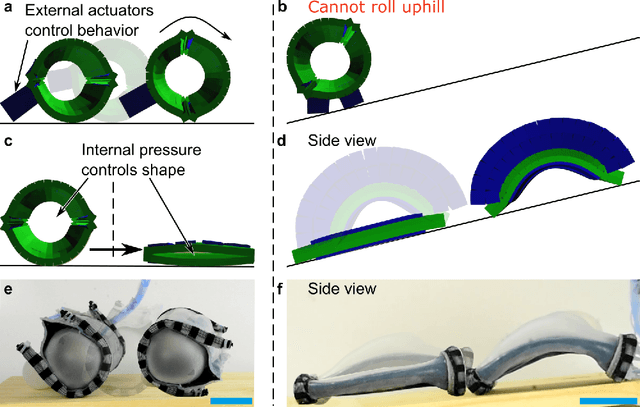


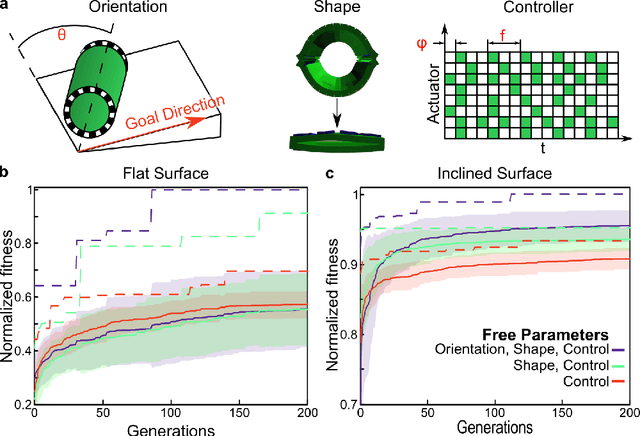
Many organisms, including various species of spiders and caterpillars, change their shape to switch gaits and adapt to different environments. Recent technological advances, ranging from stretchable circuits to highly deformable soft robots, have begun to make shape changing robots a possibility. However, it is currently unclear how and when shape change should occur, and what capabilities could be gained, leading to a wide range of unsolved design and control problems. To begin addressing these questions, here we simulate, design, and build a soft robot that utilizes shape change to achieve locomotion over both a flat and inclined surface. Modeling this robot in simulation, we explore its capabilities in two environments and demonstrate the automated discovery of environment-specific shapes and gaits that successfully transfer to the physical hardware. We found that the shape-changing robot traverses these environments better than an equivalent but non-morphing robot, in simulation and reality.
Scalable sim-to-real transfer of soft robot designs
Nov 23, 2019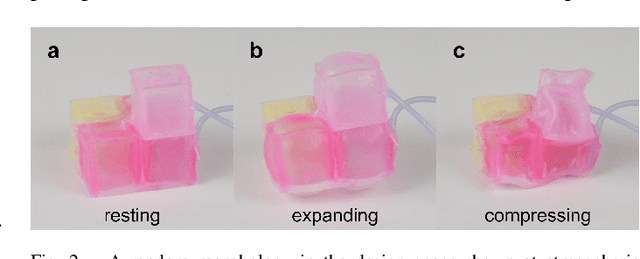
The manual design of soft robots and their controllers is notoriously challenging, but it could be augmented---or, in some cases, entirely replaced---by automated design tools. Machine learning algorithms can automatically propose, test, and refine designs in simulation, and the most promising ones can then be manufactured in reality (sim2real). However, it is currently not known how to guarantee that behavior generated in simulation can be preserved when deployed in reality. Although many previous studies have devised training protocols that facilitate sim2real transfer of control polices, little to no work has investigated the simulation-reality gap as a function of morphology. This is due in part to an overall lack of tools capable of systematically designing and rapidly manufacturing robots. Here we introduce a low cost, open source, and modular soft robot design and construction kit, and use it to simulate, fabricate, and measure the simulation-reality gap of minimally complex yet soft, locomoting machines. We prove the scalability of this approach by transferring an order of magnitude more robot designs from simulation to reality than any other method. The kit and its instructions can be found here: https://github.com/skriegman/sim2real4designs
Automated shapeshifting for function recovery in damaged robots
May 22, 2019

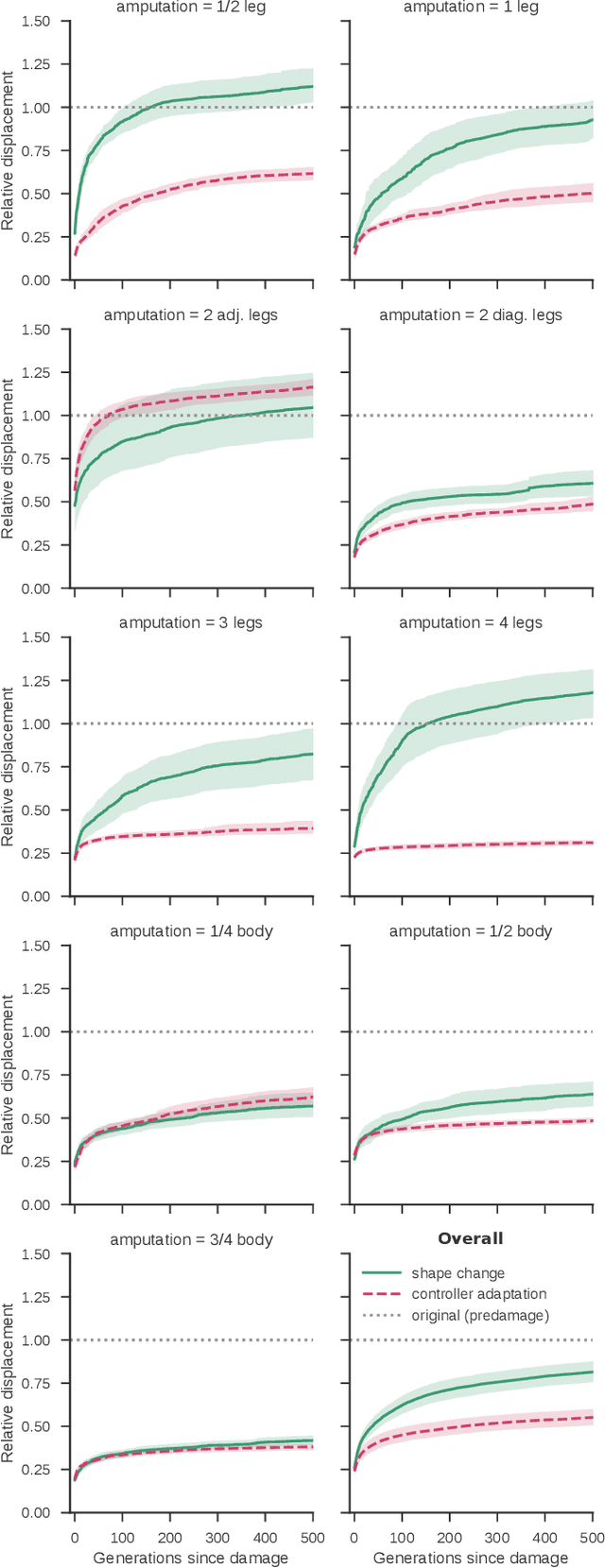
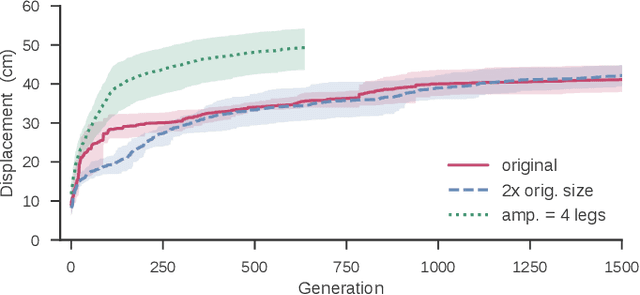
A robot's mechanical parts routinely wear out from normal functioning and can be lost to injury. For autonomous robots operating in isolated or hostile environments, repair from a human operator is often not possible. Thus, much work has sought to automate damage recovery in robots. However, every case reported in the literature to date has accepted the damaged mechanical structure as fixed, and focused on learning new ways to control it. Here we show for the first time a robot that automatically recovers from unexpected damage by deforming its resting mechanical structure without changing its control policy. We found that, especially in the case of "deep insult", such as removal of all four of the robot's legs, the damaged machine evolves shape changes that not only recover the original level of function (locomotion) as before, but can in fact surpass the original level of performance (speed). This suggests that shape change, instead of control readaptation, may be a better method to recover function after damage in some cases.