 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRenato Oliveira
A Data Mining Approach to Solve the Goal Scoring Problem
Jun 26, 2013

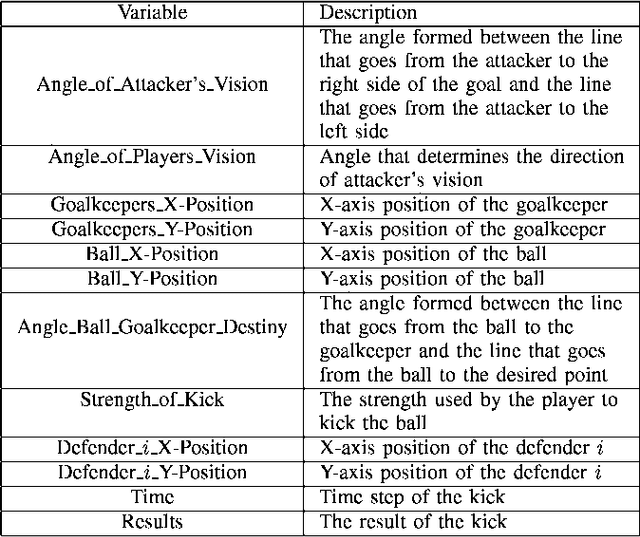
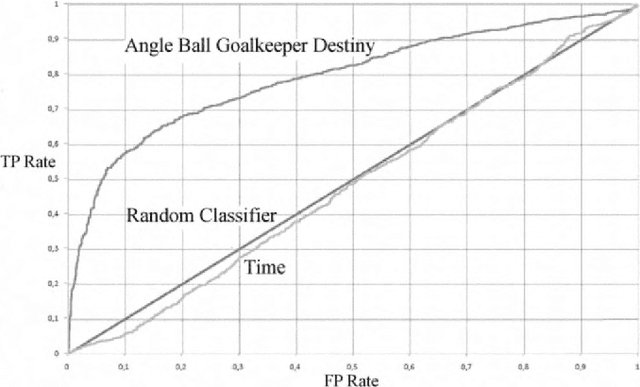
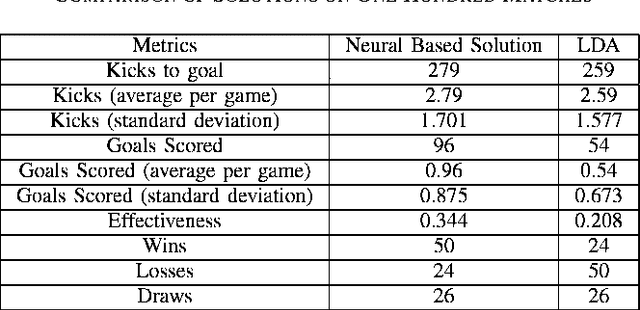
In soccer, scoring goals is a fundamental objective which depends on many conditions and constraints. Considering the RoboCup soccer 2D-simulator, this paper presents a data mining-based decision system to identify the best time and direction to kick the ball towards the goal to maximize the overall chances of scoring during a simulated soccer match. Following the CRISP-DM methodology, data for modeling were extracted from matches of major international tournaments (10691 kicks), knowledge about soccer was embedded via transformation of variables and a Multilayer Perceptron was used to estimate the scoring chance. Experimental performance assessment to compare this approach against previous LDA-based approach was conducted from 100 matches. Several statistical metrics were used to analyze the performance of the system and the results showed an increase of 7.7% in the number of kicks, producing an overall increase of 78% in the number of goals scored.
Reinforcement Learning for the Soccer Dribbling Task
May 28, 2013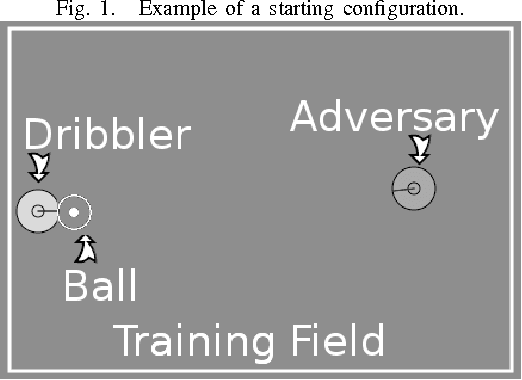
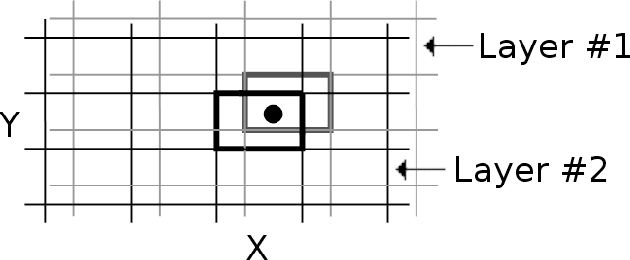
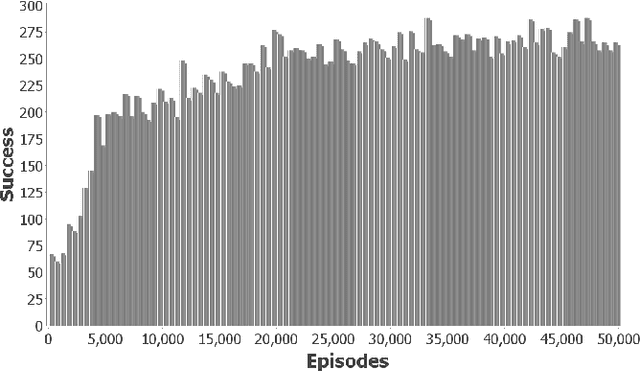
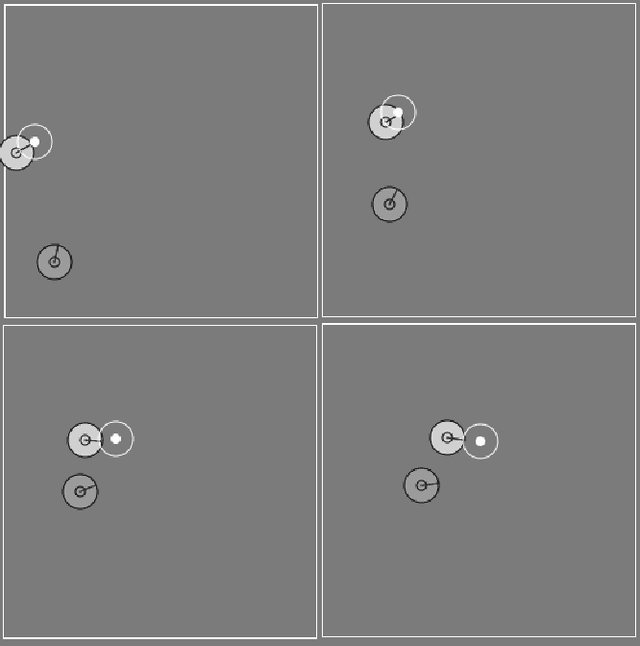
We propose a reinforcement learning solution to the \emph{soccer dribbling task}, a scenario in which a soccer agent has to go from the beginning to the end of a region keeping possession of the ball, as an adversary attempts to gain possession. While the adversary uses a stationary policy, the dribbler learns the best action to take at each decision point. After defining meaningful variables to represent the state space, and high-level macro-actions to incorporate domain knowledge, we describe our application of the reinforcement learning algorithm \emph{Sarsa} with CMAC for function approximation. Our experiments show that, after the training period, the dribbler is able to accomplish its task against a strong adversary around 58% of the time.