 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobert K. Katzschmann
Sensorized Soft Skin for Dexterous Robotic Hands
Apr 30, 2024
Conventional industrial robots often use two-fingered grippers or suction cups to manipulate objects or interact with the world. Because of their simplified design, they are unable to reproduce the dexterity of human hands when manipulating a wide range of objects. While the control of humanoid hands evolved greatly, hardware platforms still lack capabilities, particularly in tactile sensing and providing soft contact surfaces. In this work, we present a method that equips the skeleton of a tendon-driven humanoid hand with a soft and sensorized tactile skin. Multi-material 3D printing allows us to iteratively approach a cast skin design which preserves the robot's dexterity in terms of range of motion and speed. We demonstrate that a soft skin enables firmer grasps and piezoresistive sensor integration enhances the hand's tactile sensing capabilities.
Replicating Human Anatomy with Vision Controlled Jetting -- A Pneumatic Musculoskeletal Hand and Forearm
Apr 29, 2024The functional replication and actuation of complex structures inspired by nature is a longstanding goal for humanity. Creating such complex structures combining soft and rigid features and actuating them with artificial muscles would further our understanding of natural kinematic structures. We printed a biomimetic hand in a single print process comprised of a rigid skeleton, soft joint capsules, tendons, and printed touch sensors. We showed it's actuation using electric motors. In this work, we expand on this work by adding a forearm that is also closely modeled after the human anatomy and replacing the hand's motors with 22 independently controlled pneumatic artificial muscles (PAMs). Our thin, high-strain (up to 30.1%) PAMs match the performance of state-of-the-art artificial muscles at a lower cost. The system showcases human-like dexterity with independent finger movements, demonstrating successful grasping of various objects, ranging from a small, lightweight coin to a large can of 272g in weight. The performance evaluation, based on fingertip and grasping forces along with finger joint range of motion, highlights the system's potential.
High-Frequency Capacitive Sensing for Electrohydraulic Soft Actuators
Apr 08, 2024The need for compliant and proprioceptive actuators has grown more evident in pursuing more adaptable and versatile robotic systems. Hydraulically Amplified Self-Healing Electrostatic (HASEL) actuators offer distinctive advantages with their inherent softness and flexibility, making them promising candidates for various robotic tasks, including delicate interactions with humans and animals, biomimetic locomotion, prosthetics, and exoskeletons. This has resulted in a growing interest in the capacitive self-sensing capabilities of HASEL actuators to create miniature displacement estimation circuitry that does not require external sensors. However, achieving HASEL self-sensing for actuation frequencies above 1 Hz and with miniature high-voltage power supplies has remained limited. In this paper, we introduce the F-HASEL actuator, which adds an additional electrode pair used exclusively for capacitive sensing to a Peano-HASEL actuator. We demonstrate displacement estimation of the F-HASEL during high-frequency actuation up to 20 Hz and during external loading using miniaturized circuitry comprised of low-cost off-the-shelf components and a miniature high-voltage power supply. Finally, we propose a circuitry to estimate the displacement of multiple F-HASELs and demonstrate it in a wearable application to track joint rotations of a virtual reality user in real-time.
Self-Sensing Feedback Control of an Electrohydraulic Robotic Shoulder
Apr 05, 2024The human shoulder, with its glenohumeral joint, tendons, ligaments, and muscles, allows for the execution of complex tasks with precision and efficiency. However, current robotic shoulder designs lack the compliance and compactness inherent in their biological counterparts. A major limitation of these designs is their reliance on external sensors like rotary encoders, which restrict mechanical joint design and introduce bulk to the system. To address this constraint, we present a bio-inspired antagonistic robotic shoulder with two degrees of freedom powered by self-sensing hydraulically amplified self-healing electrostatic actuators. Our artificial muscle design decouples the high-voltage electrostatic actuation from the pair of low-voltage self-sensing electrodes. This approach allows for proprioceptive feedback control of trajectories in the task space while eliminating the necessity for any additional sensors. We assess the platform's efficacy by comparing it to a feedback control based on position data provided by a motion capture system. The study demonstrates closed-loop controllable robotic manipulators based on an inherent self-sensing capability of electrohydraulic actuators. The proposed architecture can serve as a basis for complex musculoskeletal joint arrangements.
Sim-to-Real of Soft Robots with Learned Residual Physics
Feb 02, 2024Accurately modeling soft robots in simulation is computationally expensive and commonly falls short of representing the real world. This well-known discrepancy, known as the sim-to-real gap, can have several causes, such as coarsely approximated geometry and material models, manufacturing defects, viscoelasticity and plasticity, and hysteresis effects. Residual physics networks learn from real-world data to augment a discrepant model and bring it closer to reality. Here, we present a residual physics method for modeling soft robots with large degrees of freedom. We train neural networks to learn a residual term -- the modeling error between simulated and physical systems. Concretely, the residual term is a force applied on the whole simulated mesh, while real position data is collected with only sparse motion markers. The physical prior of the analytical simulation provides a starting point for the residual network, and the combined model is more informed than if physics were learned tabula rasa. We demonstrate our method on 1) a silicone elastomeric beam and 2) a soft pneumatic arm with hard-to-model, anisotropic fiber reinforcements. Our method outperforms traditional system identification up to 60%. We show that residual physics need not be limited to low degrees of freedom but can effectively bridge the sim-to-real gap for high dimensional systems.
Multi-tap Resistive Sensing and FEM Modeling enables Shape and Force Estimation in Soft Robots
Nov 24, 2023We address the challenge of reliable and accurate proprioception in soft robots, specifically those with tight packaging constraints and relying only on internally embedded sensors. While various sensing approaches with single sensors have been tried, often with a constant curvature assumption, we look into sensing local deformations at multiple locations of the sensor. In our approach, we multi-tap an off-the-shelf resistive sensor by creating multiple electrical connections onto the resistive layer of the sensor and we insert the sensor into a soft body. This modification allows us to measure changes in resistance at multiple segments throughout the length of the sensor, providing improved resolution of local deformations in the soft body. These measurements inform a model based on a finite element method (FEM) that estimates the shape of the soft body and the magnitude of an external force acting at a known arbitrary location. Our model-based approach estimates soft body deformation with approximately 3% average relative error while taking into account internal fluidic actuation. Our estimate of external force disturbance has an 11% relative error within a range of 0 to 5 N. The combined sensing and modeling approach can be integrated, for instance, into soft manipulation platforms to enable features such as identifying the shape and material properties of an object being grasped. Such manipulators can benefit from the inherent softness and compliance while being fully proprioceptive, relying only on embedded sensing and not on external systems such as motion capture. Such proprioception is essential for the deployment of soft robots in real-world scenarios.
Fast Point-cloud to Mesh Reconstruction for Deformable Object Tracking
Nov 05, 2023The world around us is full of soft objects that we as humans learn to perceive and deform with dexterous hand movements from a young age. In order for a Robotic hand to be able to control soft objects, it needs to acquire online state feedback of the deforming object. While RGB-D cameras can collect occluded information at a rate of 30 Hz, the latter does not represent a continuously trackable object surface. Hence, in this work, we developed a method that can create deforming meshes of deforming point clouds at a speed of above 50 Hz for different categories of objects. The reconstruction of meshes from point clouds has been long studied in the field of Computer graphics under 3D reconstruction and 4D reconstruction, however both lack the speed and generalizability needed for robotics applications. Our model is designed using a point cloud auto-encoder and a Real-NVP architecture. The latter is a continuous flow neural network with manifold-preservation properties. Our model takes a template mesh which is the mesh of an object in its canonical state and then deforms the template mesh to match a deformed point cloud of the object. Our method can perform mesh reconstruction and tracking at a rate of 58 Hz for deformations of six different ycb categories. An instance of a downstream application can be the control algorithm for a robotic hand that requires online feedback from the state of a manipulated object which would allow online grasp adaptation in a closed-loop manner. Furthermore, the tracking capacity that our method provides can help in the system identification of deforming objects in a marker-free approach. In future work, we will extend our method to more categories of objects and real world deforming point clouds
Getting the Ball Rolling: Learning a Dexterous Policy for a Biomimetic Tendon-Driven Hand with Rolling Contact Joints
Aug 04, 2023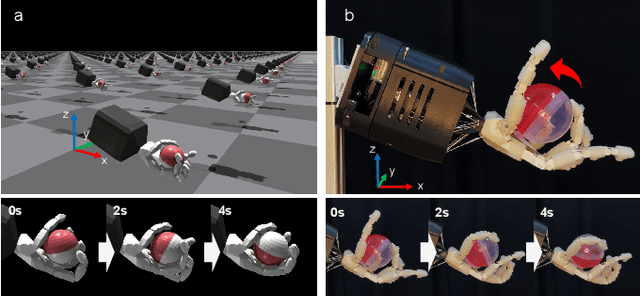
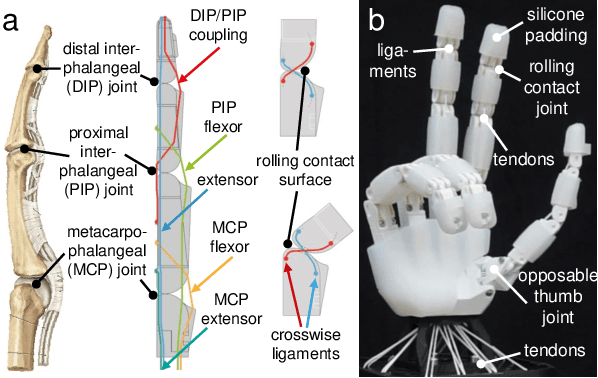
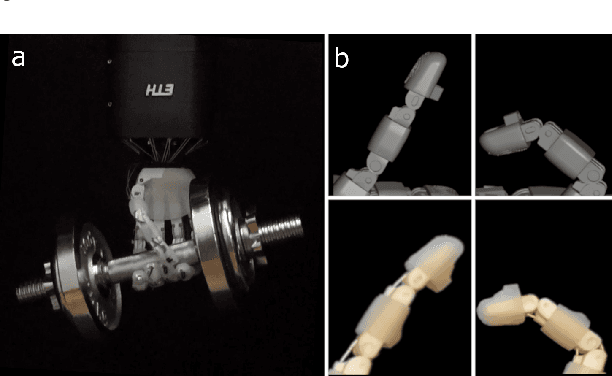
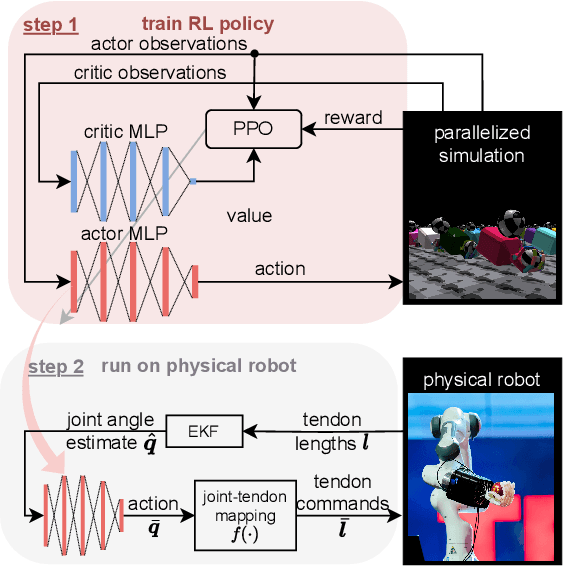
Biomimetic, dexterous robotic hands have the potential to replicate much of the tasks that a human can do, and to achieve status as a general manipulation platform. Recent advances in reinforcement learning (RL) frameworks have achieved remarkable performance in quadrupedal locomotion and dexterous manipulation tasks. Combined with GPU-based highly parallelized simulations capable of simulating thousands of robots in parallel, RL-based controllers have become more scalable and approachable. However, in order to bring RL-trained policies to the real world, we require training frameworks that output policies that can work with physical actuators and sensors as well as a hardware platform that can be manufactured with accessible materials yet is robust enough to run interactive policies. This work introduces the biomimetic tendon-driven Faive Hand and its system architecture, which uses tendon-driven rolling contact joints to achieve a 3D printable, robust high-DoF hand design. We model each element of the hand and integrate it into a GPU simulation environment to train a policy with RL, and achieve zero-shot transfer of a dexterous in-hand sphere rotation skill to the physical robot hand.
Vandermonde Neural Operators
Jun 05, 2023



Fourier Neural Operators (FNOs) have emerged as very popular machine learning architectures for learning operators, particularly those arising in PDEs. However, as FNOs rely on the fast Fourier transform for computational efficiency, the architecture can be limited to input data on equispaced Cartesian grids. Here, we generalize FNOs to handle input data on non-equispaced point distributions. Our proposed model, termed as Vandermonde Neural Operator (VNO), utilizes Vandermonde-structured matrices to efficiently compute forward and inverse Fourier transforms, even on arbitrarily distributed points. We present numerical experiments to demonstrate that VNOs can be significantly faster than FNOs, while retaining comparable accuracy, and improve upon accuracy of comparable non-equispaced methods such as the Geo-FNO.
Low Voltage Electrohydraulic Actuators for Untethered Robotics
Jun 01, 2023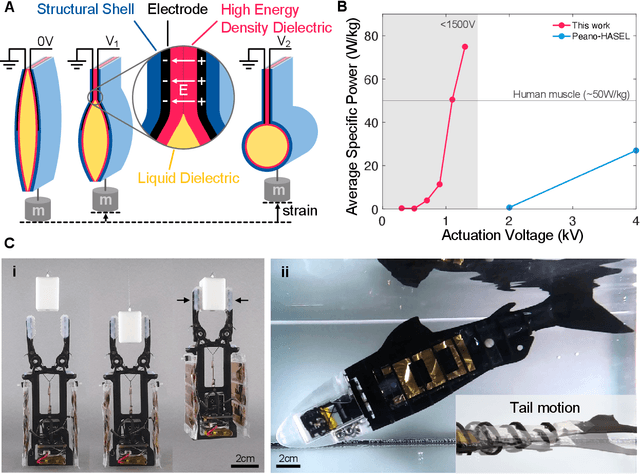
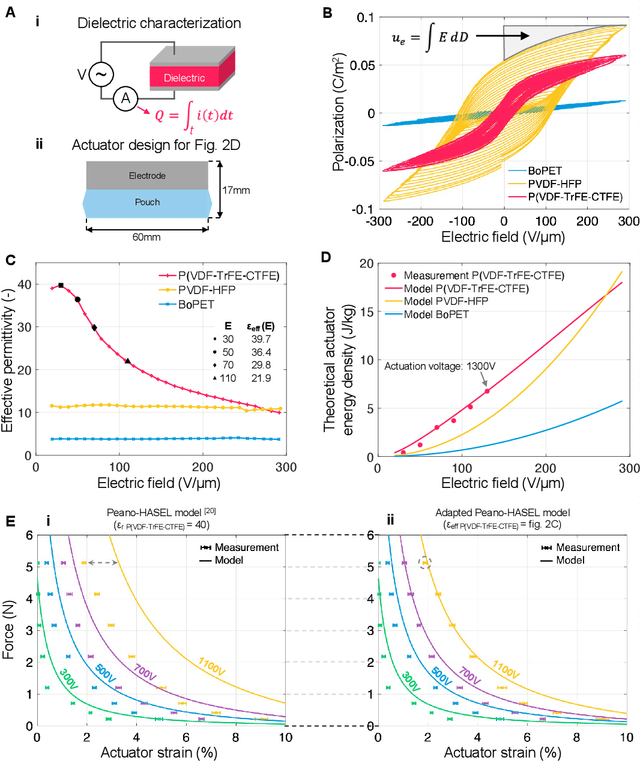
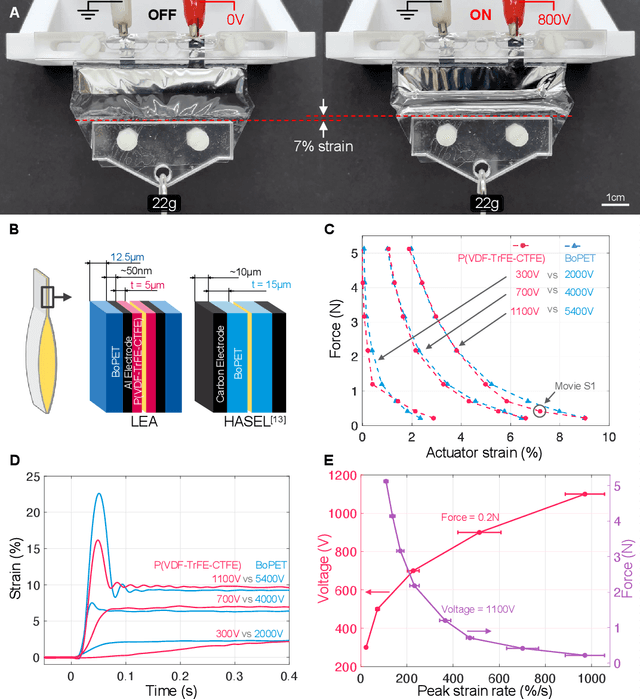
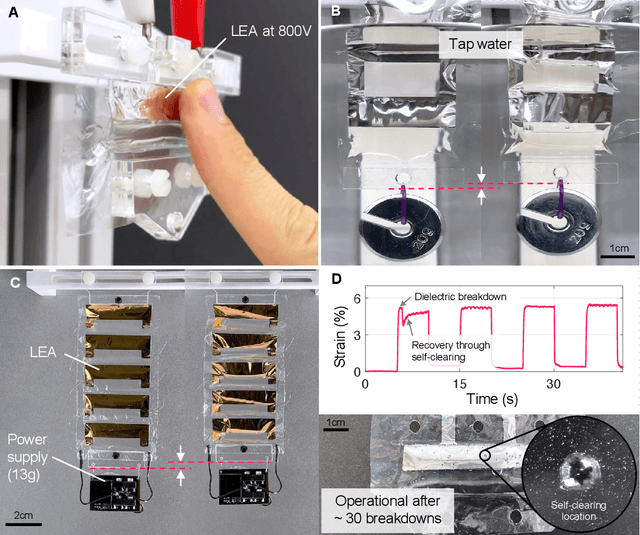
Rigid robots can be precise in repetitive tasks but struggle in unstructured environments. Nature's versatility in such environments inspires researchers to develop biomimetic robots that incorporate compliant and contracting artificial muscles. Among the recently proposed artificial muscle technologies, electrohydraulic actuators are promising since they offer comparable performance to mammalian muscles in terms of speed and power density. However, they require high driving voltages and have safety concerns due to exposed electrodes. These high voltages lead to either bulky or inefficient driving electronics that make untethered, high-degree-of-freedom bio-inspired robots difficult to realize. Here, we present low voltage electrohydraulic actuators (LEAs) that match mammalian skeletal muscles in average power density (50.5 W/kg) and peak strain rate (971 percent/s) at a driving voltage of just 1100 V. This driving voltage is approx. 5 - 7 times lower compared to other electrohydraulic actuators using paraelectric dielectrics. Furthermore, LEAs are safe to touch, waterproof, and self-clearing, which makes them easy to implement in wearables and robotics. We characterize, model, and physically validate key performance metrics of the actuator and compare its performance to state-of-the-art electrohydraulic designs. Finally, we demonstrate the utility of our actuators on two muscle-based electrohydraulic robots: an untethered soft robotic swimmer and a robotic gripper. We foresee that LEAs can become a key building block for future highly-biomimetic untethered robots and wearables with many independent artificial muscles such as biomimetic hands, faces, or exoskeletons.