 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobert Mahony
End-to-end Multi-Instance Robotic Reaching from Monocular Vision
Jan 22, 2024
Multi-instance scenes are especially challenging for end-to-end visuomotor (image-to-control) learning algorithms. "Pipeline" visual servo control algorithms use separate detection, selection and servo stages, allowing algorithms to focus on a single object instance during servo control. End-to-end systems do not have separate detection and selection stages and need to address the visual ambiguities introduced by the presence of arbitrary number of visually identical or similar objects during servo control. However, end-to-end schemes avoid embedding errors from detection and selection stages in the servo control behaviour, are more dynamically robust to changing scenes, and are algorithmically simpler. In this paper, we present a real-time end-to-end visuomotor learning algorithm for multi-instance reaching. The proposed algorithm uses a monocular RGB image and the manipulator's joint angles as the input to a light-weight fully-convolutional network (FCN) to generate control candidates. A key innovation of the proposed method is identifying the optimal control candidate by regressing a control-Lyapunov function (cLf) value. The multi-instance capability emerges naturally from the stability analysis associated with the cLf formulation. We demonstrate the proposed algorithm effectively reaching and grasping objects from different categories on a table-top amid other instances and distractors from an over-the-shoulder monocular RGB camera. The network is able to run up to approximately 160 fps during inference on one GTX 1080 Ti GPU.
MSCEqF: A Multi State Constraint Equivariant Filter for Vision-aided Inertial Navigation
Nov 20, 2023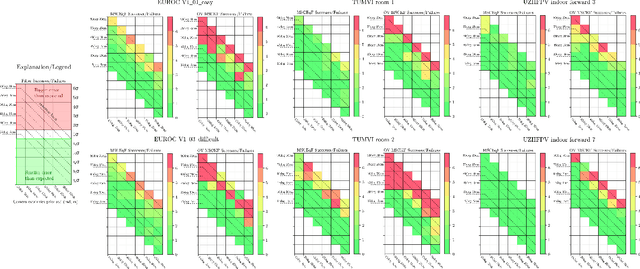

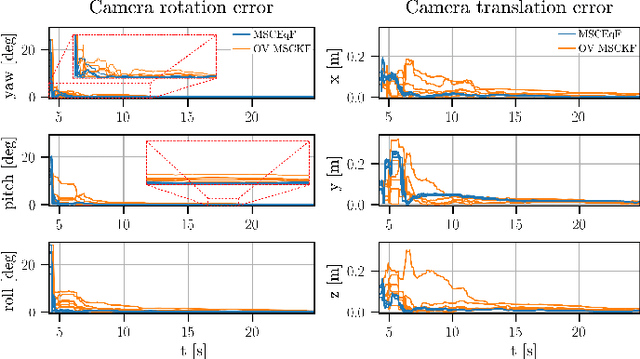
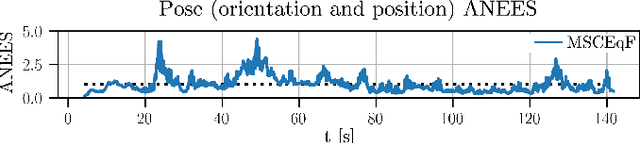
This letter re-visits the problem of visual-inertial navigation system (VINS) and presents a novel filter design we dub the multi state constraint equivariant filter (MSCEqF, in analogy to the well known MSCKF). We define a symmetry group and corresponding group action that allow specifically the design of an equivariant filter for the problem of visual-inertial odometry (VIO) including IMU bias, and camera intrinsic and extrinsic calibration states. In contrast to state-of-the-art invariant extended Kalman filter (IEKF) approaches that simply tack IMU bias and other states onto the $\mathbf{SE}_2(3)$ group, our filter builds upon a symmetry that properly includes all the states in the group structure. Thus, we achieve improved behavior, particularly when linearization points largely deviate from the truth (i.e., on transients upon state disturbances). Our approach is inherently consistent even during convergence phases from significant errors without the need for error uncertainty adaptation, observability constraint, or other consistency enforcing techniques. This leads to greatly improved estimator behavior for significant error and unexpected state changes during, e.g., long-duration missions. We evaluate our approach with a multitude of different experiments using three different prominent real-world datasets.
High Frequency, High Accuracy Pointing onboard Nanosats using Neuromorphic Event Sensing and Piezoelectric Actuation
Sep 11, 2023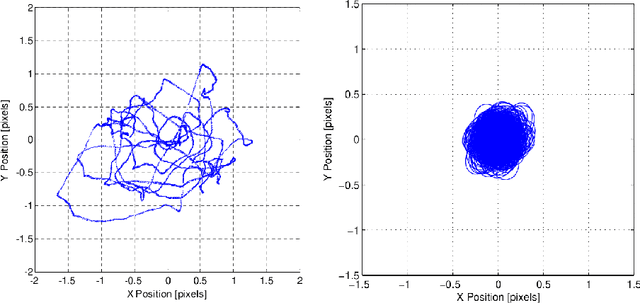
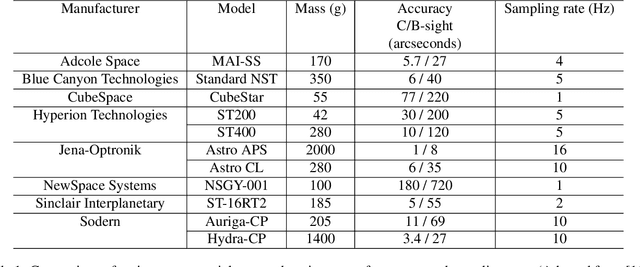
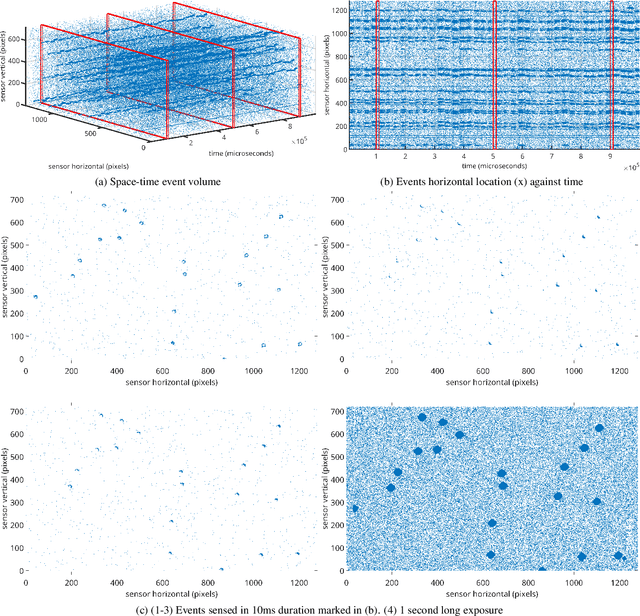
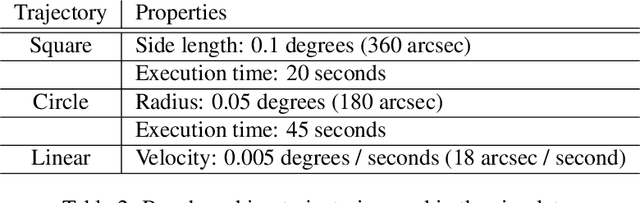
As satellites become smaller, the ability to maintain stable pointing decreases as external forces acting on the satellite come into play. At the same time, reaction wheels used in the attitude determination and control system (ADCS) introduce high frequency jitter which can disrupt pointing stability. For space domain awareness (SDA) tasks that track objects tens of thousands of kilometres away, the pointing accuracy offered by current nanosats, typically in the range of 10 to 100 arcseconds, is not sufficient. In this work, we develop a novel payload that utilises a neuromorphic event sensor (for high frequency and highly accurate relative attitude estimation) paired in a closed loop with a piezoelectric stage (for active attitude corrections) to provide highly stable sensor-specific pointing. Event sensors are especially suited for space applications due to their desirable characteristics of low power consumption, asynchronous operation, and high dynamic range. We use the event sensor to first estimate a reference background star field from which instantaneous relative attitude is estimated at high frequency. The piezoelectric stage works in a closed control loop with the event sensor to perform attitude corrections based on the discrepancy between the current and desired attitude. Results in a controlled setting show that we can achieve a pointing accuracy in the range of 1-5 arcseconds using our novel payload at an operating frequency of up to 50Hz using a prototype built from commercial-off-the-shelf components. Further details can be found at https://ylatif.github.io/ultrafinestabilisation
Equivariant Symmetries for Inertial Navigation Systems
Sep 07, 2023
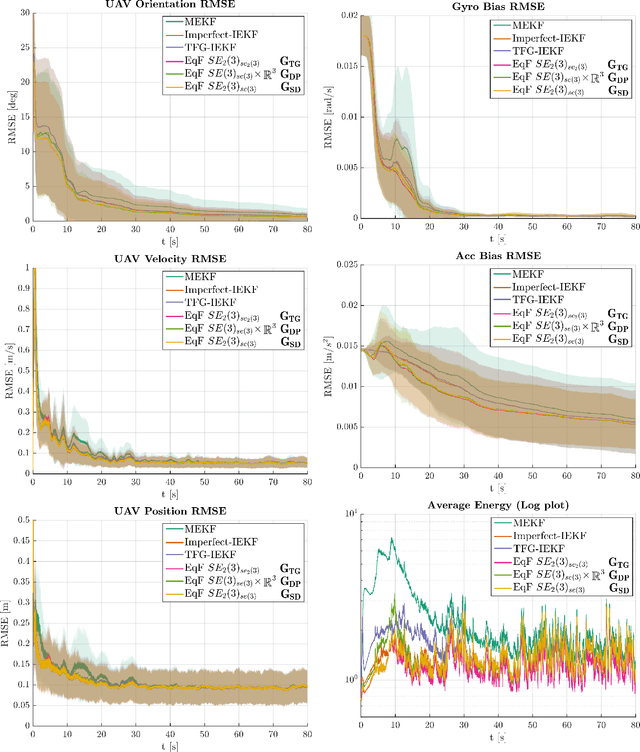

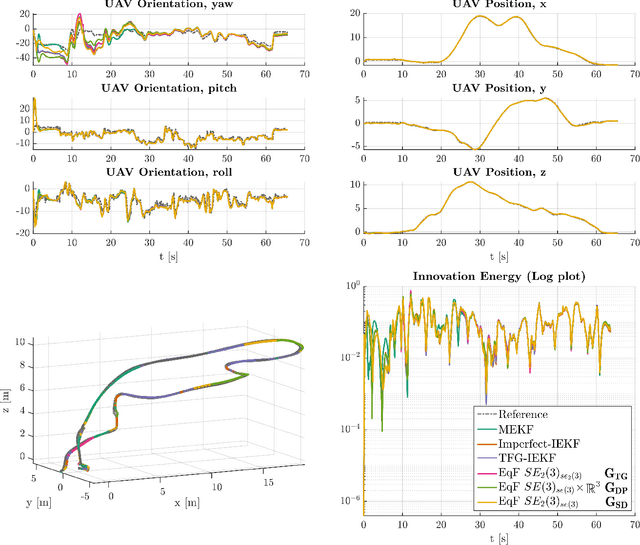
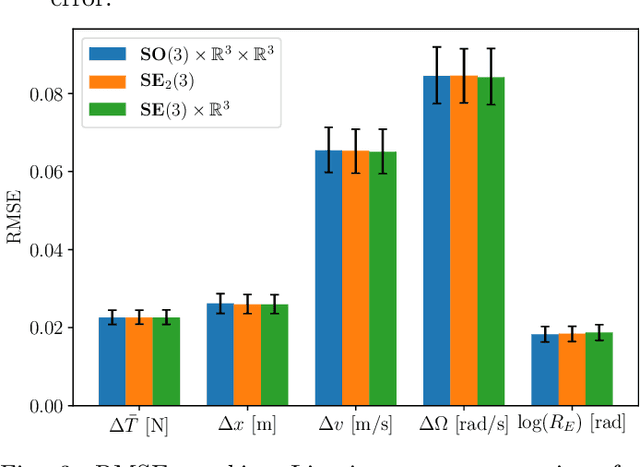
This paper investigates the problem of inertial navigation system (INS) filter design through the lens of symmetry. The extended Kalman filter (EKF) and its variants, have been the staple of INS filtering for 50 years; however, recent advances in inertial navigation systems have exploited matrix Lie group structure to design stochastic filters and state observers that have been shown to display superior performance compared to classical solutions. In this work we consider the case where a vehicle has an inertial measurement unit (IMU) and a global navigation satellite system (GNSS) receiver. We show that all the modern variants of the EKF for these sensors can be interpreted as the recently proposed Equivariant Filter (EqF) design methodology applied to different choices of symmetry group for the INS problem. This leads us to propose two new symmetries for the INS problem that have not been considered in the prior literature, and provide a discussion of the relative strengths and weaknesses of all the different algorithms. We believe the collection of symmetries that we present here capture all the sensible choices of symmetry for this problem and sensor suite, and that the analysis provided is indicative of the relative real-world performance potential of the different algorithms.
An Asynchronous Linear Filter Architecture for Hybrid Event-Frame Cameras
Sep 03, 2023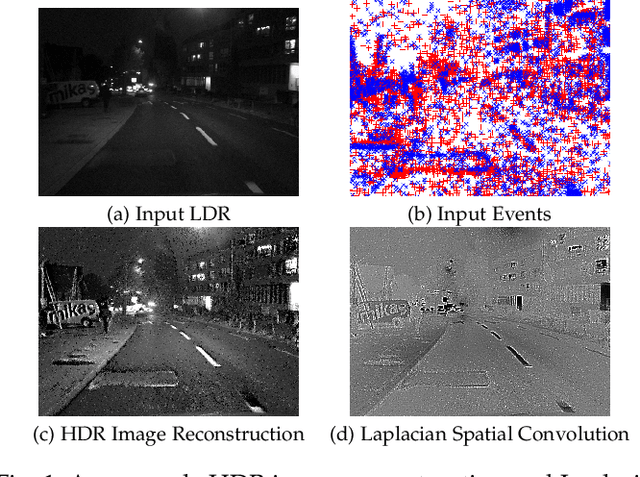


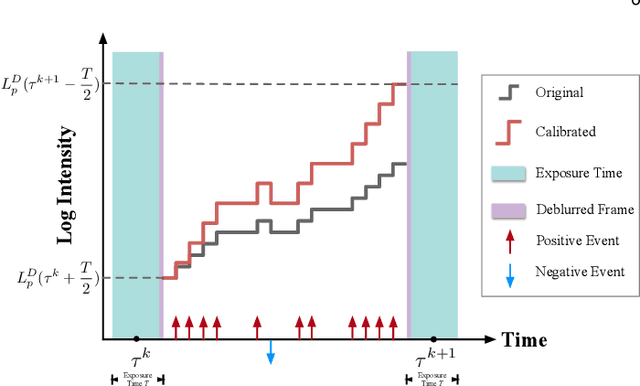
Event cameras are ideally suited to capture High Dynamic Range (HDR) visual information without blur but provide poor imaging capability for static or slowly varying scenes. Conversely, conventional image sensors measure absolute intensity of slowly changing scenes effectively but do poorly on HDR or quickly changing scenes. In this paper, we present an asynchronous linear filter architecture, fusing event and frame camera data, for HDR video reconstruction and spatial convolution that exploits the advantages of both sensor modalities. The key idea is the introduction of a state that directly encodes the integrated or convolved image information and that is updated asynchronously as each event or each frame arrives from the camera. The state can be read-off as-often-as and whenever required to feed into subsequent vision modules for real-time robotic systems. Our experimental results are evaluated on both publicly available datasets with challenging lighting conditions and fast motions, along with a new dataset with HDR reference that we provide. The proposed AKF pipeline outperforms other state-of-the-art methods in both absolute intensity error (69.4% reduction) and image similarity indexes (average 35.5% improvement). We also demonstrate the integration of image convolution with linear spatial kernels Gaussian, Sobel, and Laplacian as an application of our architecture.
Event Blob Tracking: An Asynchronous Real-Time Algorithm
Jul 20, 2023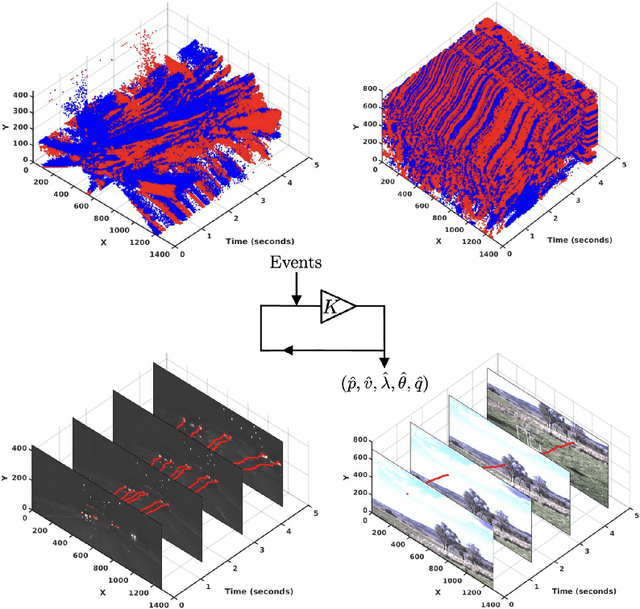

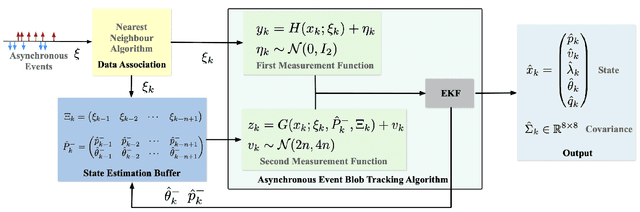

Event-based cameras have become increasingly popular for tracking fast-moving objects due to their high temporal resolution, low latency, and high dynamic range. In this paper, we propose a novel algorithm for tracking event blobs using raw events asynchronously in real time. We introduce the concept of an event blob as a spatio-temporal likelihood of event occurrence where the conditional spatial likelihood is blob-like. Many real-world objects generate event blob data, for example, flickering LEDs such as car headlights or any small foreground object moving against a static or slowly varying background. The proposed algorithm uses a nearest neighbour classifier with a dynamic threshold criteria for data association coupled with a Kalman filter to track the event blob state. Our algorithm achieves highly accurate tracking and event blob shape estimation even under challenging lighting conditions and high-speed motions. The microsecond time resolution achieved means that the filter output can be used to derive secondary information such as time-to-contact or range estimation, that will enable applications to real-world problems such as collision avoidance in autonomous driving.
GoferBot: A Visual Guided Human-Robot Collaborative Assembly System
Apr 18, 2023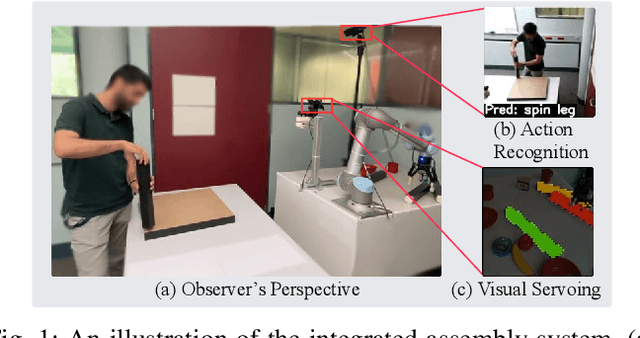

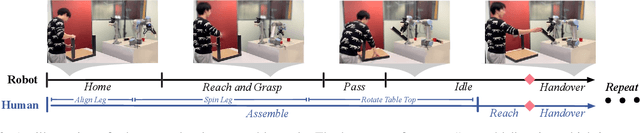

The current transformation towards smart manufacturing has led to a growing demand for human-robot collaboration (HRC) in the manufacturing process. Perceiving and understanding the human co-worker's behaviour introduces challenges for collaborative robots to efficiently and effectively perform tasks in unstructured and dynamic environments. Integrating recent data-driven machine vision capabilities into HRC systems is a logical next step in addressing these challenges. However, in these cases, off-the-shelf components struggle due to generalisation limitations. Real-world evaluation is required in order to fully appreciate the maturity and robustness of these approaches. Furthermore, understanding the pure-vision aspects is a crucial first step before combining multiple modalities in order to understand the limitations. In this paper, we propose GoferBot, a novel vision-based semantic HRC system for a real-world assembly task. It is composed of a visual servoing module that reaches and grasps assembly parts in an unstructured multi-instance and dynamic environment, an action recognition module that performs human action prediction for implicit communication, and a visual handover module that uses the perceptual understanding of human behaviour to produce an intuitive and efficient collaborative assembly experience. GoferBot is a novel assembly system that seamlessly integrates all sub-modules by utilising implicit semantic information purely from visual perception.
Overcoming Bias: Equivariant Filter Design for Biased Attitude Estimation with Online Calibration
Sep 24, 2022



Stochastic filters for on-line state estimation are a core technology for autonomous systems. The performance of such filters is one of the key limiting factors to a system's capability. Both asymptotic behavior (e.g.,~for regular operation) and transient response (e.g.,~for fast initialization and reset) of such filters are of crucial importance in guaranteeing robust operation of autonomous systems. This paper introduces a new generic formulation for a gyroscope aided attitude estimator using N direction measurements including both body-frame and reference-frame direction type measurements. The approach is based on an integrated state formulation that incorporates navigation, extrinsic calibration for all direction sensors, and gyroscope bias states in a single equivariant geometric structure. This newly proposed symmetry allows modular addition of different direction measurements and their extrinsic calibration while maintaining the ability to include bias states in the same symmetry. The subsequently proposed filter-based estimator using this symmetry noticeably improves the transient response, and the asymptotic bias and extrinsic calibration estimation compared to state-of-the-art approaches. The estimator is verified in statistically representative simulations and is tested in real-world experiments.
Smart Visual Beacons with Asynchronous Optical Communications using Event Cameras
Aug 02, 2022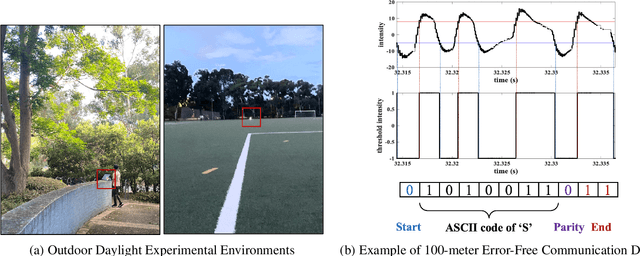

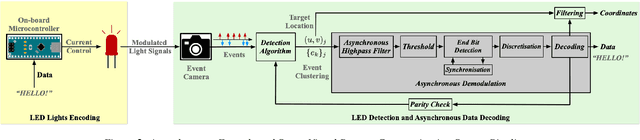
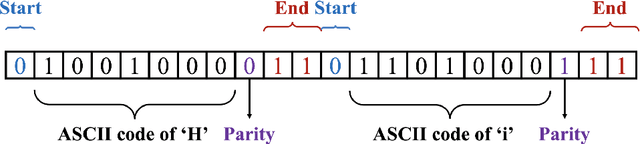
Event cameras are bio-inspired dynamic vision sensors that respond to changes in image intensity with a high temporal resolution, high dynamic range and low latency. These sensor characteristics are ideally suited to enable visual target tracking in concert with a broadcast visual communication channel for smart visual beacons with applications in distributed robotics. Visual beacons can be constructed by high-frequency modulation of Light Emitting Diodes (LEDs) such as vehicle headlights, Internet of Things (IoT) LEDs, smart building lights, etc., that are already present in many real-world scenarios. The high temporal resolution characteristic of the event cameras allows them to capture visual signals at far higher data rates compared to classical frame-based cameras. In this paper, we propose a novel smart visual beacon architecture with both LED modulation and event camera demodulation algorithms. We quantitatively evaluate the relationship between LED transmission rate, communication distance and the message transmission accuracy for the smart visual beacon communication system that we prototyped. The proposed method achieves up to 4 kbps in an indoor environment and lossless transmission over a distance of 100 meters, at a transmission rate of 500 bps, in full sunlight, demonstrating the potential of the technology in an outdoor environment.
Exploiting Different Symmetries for Trajectory Tracking Control with Application to Quadrotors
Jul 16, 2022
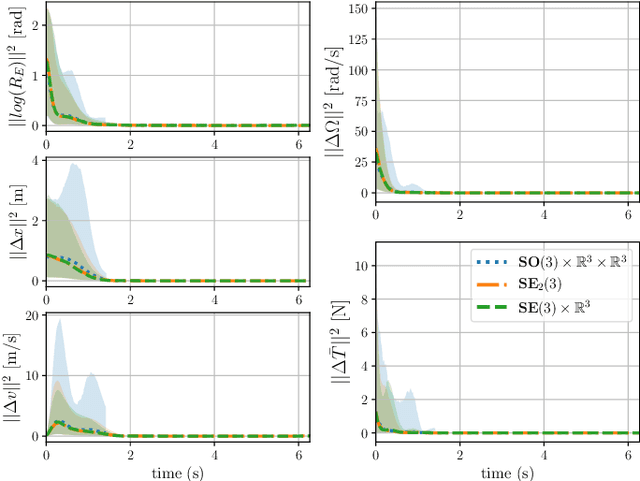
High performance trajectory tracking control of quadrotor vehicles is an important challenge in aerial robotics. Symmetry is a fundamental property of physical systems and offers the potential to provide a tool to design high-performance control algorithms. We propose a design methodology that takes any given symmetry, linearises the associated error in a single set of coordinates, and uses LQR design to obtain a high performance control; an approach we term Equivariant Regulator design. We show that quadrotor vehicles admit several different symmetries: the direct product symmetry, the extended pose symmetry and the pose and velocity symmetry, and show that each symmetry can be used to define a global error. We compare the linearised systems via simulation and find that the extended pose and pose and velocity symmetries outperform the direct product symmetry in the presence of large disturbances. This suggests that choices of equivariant and group affine symmetries have improved linearisation error.