 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSarvapali D. Ramchurn
The Strain of Success: A Predictive Model for Injury Risk Mitigation and Team Success in Soccer
Feb 07, 2024
In this paper, we present a novel sequential team selection model in soccer. Specifically, we model the stochastic process of player injury and unavailability using player-specific information learned from real-world soccer data. Monte-Carlo Tree Search is used to select teams for games that optimise long-term team performance across a soccer season by reasoning over player injury probability. We validate our approach compared to benchmark solutions for the 2018/19 English Premier League season. Our model achieves similar season expected points to the benchmark whilst reducing first-team injuries by ~13% and the money inefficiently spent on injured players by ~11% - demonstrating the potential to reduce costs and improve player welfare in real-world soccer teams.
The Effect of Predictive Formal Modelling at Runtime on Performance in Human-Swarm Interaction
Jan 22, 2024Formal Modelling is often used as part of the design and testing process of software development to ensure that components operate within suitable bounds even in unexpected circumstances. In this paper, we use predictive formal modelling (PFM) at runtime in a human-swarm mission and show that this integration can be used to improve the performance of human-swarm teams. We recruited 60 participants to operate a simulated aerial swarm to deliver parcels to target locations. In the PFM condition, operators were informed of the estimated completion times given the number of drones deployed, whereas in the No-PFM condition, operators did not have this information. The operators could control the mission by adding or removing drones from the mission and thereby, increasing or decreasing the overall mission cost. The evaluation of human-swarm performance relied on four key metrics: the time taken to complete tasks, the number of agents involved, the total number of tasks accomplished, and the overall cost associated with the human-swarm task. Our results show that PFM modelling at runtime improves mission performance without significantly affecting the operator's workload or the system's usability.
Design Space Exploration of Low-Bit Quantized Neural Networks for Visual Place Recognition
Dec 14, 2023Visual Place Recognition (VPR) is a critical task for performing global re-localization in visual perception systems. It requires the ability to accurately recognize a previously visited location under variations such as illumination, occlusion, appearance and viewpoint. In the case of robotic systems and augmented reality, the target devices for deployment are battery powered edge devices. Therefore whilst the accuracy of VPR methods is important so too is memory consumption and latency. Recently new works have focused on the recall@1 metric as a performance measure with limited focus on resource utilization. This has resulted in methods that use deep learning models too large to deploy on low powered edge devices. We hypothesize that these large models are highly over-parameterized and can be optimized to satisfy the constraints of a low powered embedded system whilst maintaining high recall performance. Our work studies the impact of compact convolutional network architecture design in combination with full-precision and mixed-precision post-training quantization on VPR performance. Importantly we not only measure performance via the recall@1 score but also measure memory consumption and latency. We characterize the design implications on memory, latency and recall scores and provide a number of design recommendations for VPR systems under these resource limitations.
The Effect of Data Visualisation Quality and Task Density on Human-Swarm Interaction
Jul 17, 2023



Despite the advantages of having robot swarms, human supervision is required for real-world applications. The performance of the human-swarm system depends on several factors including the data availability for the human operators. In this paper, we study the human factors aspect of the human-swarm interaction and investigate how having access to high-quality data can affect the performance of the human-swarm system - the number of tasks completed and the human trust level in operation. We designed an experiment where a human operator is tasked to operate a swarm to identify casualties in an area within a given time period. One group of operators had the option to request high-quality pictures while the other group had to base their decision on the available low-quality images. We performed a user study with 120 participants and recorded their success rate (directly logged via the simulation platform) as well as their workload and trust level (measured through a questionnaire after completing a human-swarm scenario). The findings from our study indicated that the group granted access to high-quality data exhibited an increased workload and placed greater trust in the swarm, thus confirming our initial hypothesis. However, we also found that the number of accurately identified casualties did not significantly vary between the two groups, suggesting that data quality had no impact on the successful completion of tasks.
Demonstrating Performance Benefits of Human-Swarm Teaming
Mar 23, 2023

Autonomous swarms of robots can bring robustness, scalability and adaptability to safety-critical tasks such as search and rescue but their application is still very limited. Using semi-autonomous swarms with human control can bring robot swarms to real-world applications. Human operators can define goals for the swarm, monitor their performance and interfere with, or overrule, the decisions and behaviour. We present the ``Human And Robot Interactive Swarm'' simulator (HARIS) that allows multi-user interaction with a robot swarm and facilitates qualitative and quantitative user studies through simulation of robot swarms completing tasks, from package delivery to search and rescue, with varying levels of human control. In this demonstration, we showcase the simulator by using it to study the performance gain offered by maintaining a ``human-in-the-loop'' over a fully autonomous system as an example. This is illustrated in the context of search and rescue, with an autonomous allocation of resources to those in need.
Inferring Player Location in Sports Matches: Multi-Agent Spatial Imputation from Limited Observations
Feb 13, 2023



Understanding agent behaviour in Multi-Agent Systems (MAS) is an important problem in domains such as autonomous driving, disaster response, and sports analytics. Existing MAS problems typically use uniform timesteps with observations for all agents. In this work, we analyse the problem of agent location imputation, specifically posed in environments with non-uniform timesteps and limited agent observability (~95% missing values). Our approach uses Long Short-Term Memory and Graph Neural Network components to learn temporal and inter-agent patterns to predict the location of all agents at every timestep. We apply this to the domain of football (soccer) by imputing the location of all players in a game from sparse event data (e.g., shots and passes). Our model estimates player locations to within ~6.9m; a ~62% reduction in error from the best performing baseline. This approach facilitates downstream analysis tasks such as player physical metrics, player coverage, and team pitch control. Existing solutions to these tasks often require optical tracking data, which is expensive to obtain and only available to elite clubs. By imputing player locations from easy to obtain event data, we increase the accessibility of downstream tasks.
From Intelligent Agents to Trustworthy Human-Centred Multiagent Systems
Oct 05, 2022
The Agents, Interaction and Complexity research group at the University of Southampton has a long track record of research in multiagent systems (MAS). We have made substantial scientific contributions across learning in MAS, game-theoretic techniques for coordinating agent systems, and formal methods for representation and reasoning. We highlight key results achieved by the group and elaborate on recent work and open research challenges in developing trustworthy autonomous systems and deploying human-centred AI systems that aim to support societal good.
* Appears in the Special Issue on Multi-Agent Systems Research in the United Kingdom
Industry Led Use-Case Development for Human-Swarm Operations
Jul 24, 2022

In the domain of unmanned vehicles, autonomous robotic swarms promise to deliver increased efficiency and collective autonomy. How these swarms will operate in the future, and what communication requirements and operational boundaries will arise are yet to be sufficiently defined. A workshop was conducted with 11 professional unmanned-vehicle operators and designers with the objective of identifying use-cases for developing and testing robotic swarms. Three scenarios were defined by experts and were then compiled to produce a single use case outlining the scenario, objectives, agents, communication requirements and stages of operation when collaborating with highly autonomous swarms. Our compiled use case is intended for researchers, designers, and manufacturers alike to test and tailor their design pipeline to accommodate for some of the key issues in human-swarm ininteraction. Examples of application include informing simulation development, forming the basis of further design workshops, and identifying trust issues that may arise between human operators and the swarm.
Collective Decision Making in Communication-Constrained Environments
Jul 19, 2022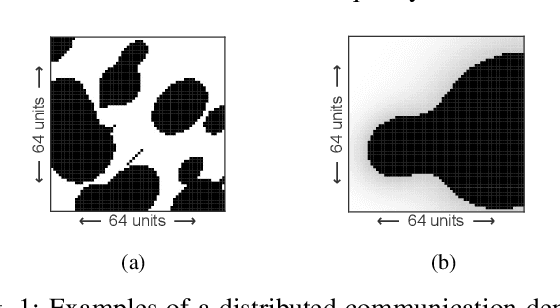
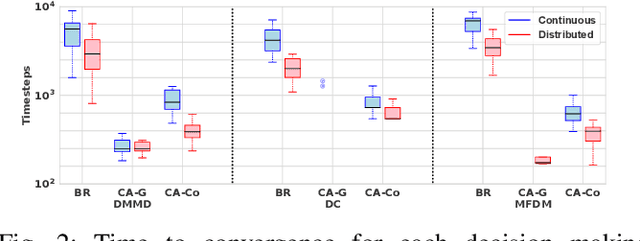
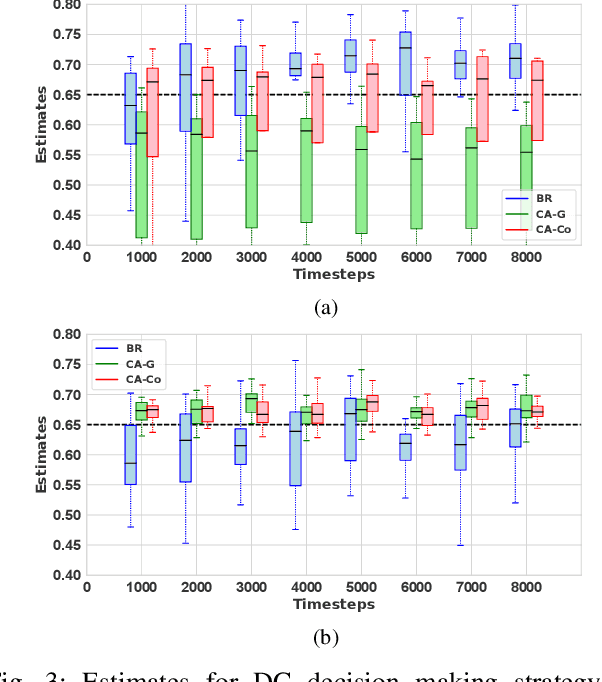
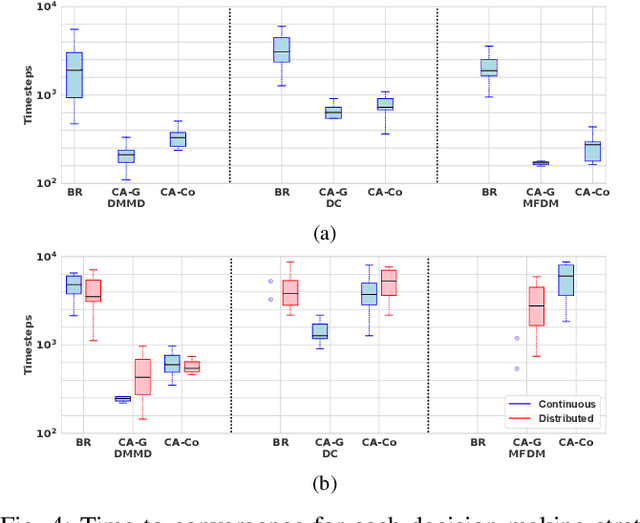
One of the main tasks for autonomous robot swarms is to collectively decide on the best available option. Achieving that requires a high quality communication between the agents that may not be always available in a real world environment. In this paper we introduce the communication-constrained collective decision-making problem where some areas of the environment limit the agents' ability to communicate, either by reducing success rate or blocking the communication channels. We propose a decentralised algorithm for mapping environmental features for robot swarms as well as improving collective decision making in communication-limited environments without prior knowledge of the communication landscape. Our results show that making a collective aware of the communication environment can improve the speed of convergence in the presence of communication limitations, at least 3 times faster, without sacrificing accuracy.
Trustworthy Autonomous Systems (TAS): Engaging TAS experts in curriculum design
Feb 16, 2022



Recent advances in artificial intelligence, specifically machine learning, contributed positively to enhancing the autonomous systems industry, along with introducing social, technical, legal and ethical challenges to make them trustworthy. Although Trustworthy Autonomous Systems (TAS) is an established and growing research direction that has been discussed in multiple disciplines, e.g., Artificial Intelligence, Human-Computer Interaction, Law, and Psychology. The impact of TAS on education curricula and required skills for future TAS engineers has rarely been discussed in the literature. This study brings together the collective insights from a number of TAS leading experts to highlight significant challenges for curriculum design and potential TAS required skills posed by the rapid emergence of TAS. Our analysis is of interest not only to the TAS education community but also to other researchers, as it offers ways to guide future research toward operationalising TAS education.