 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSehoon Oh
Differentiable Environment Primitives for Contact State Estimation
Apr 03, 2023
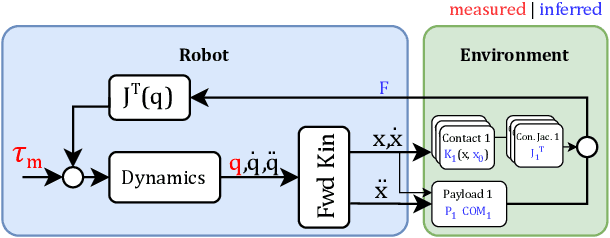
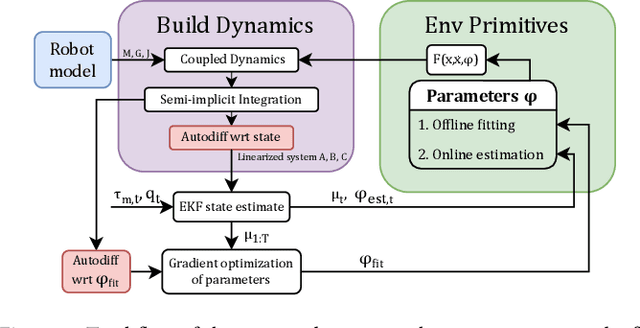
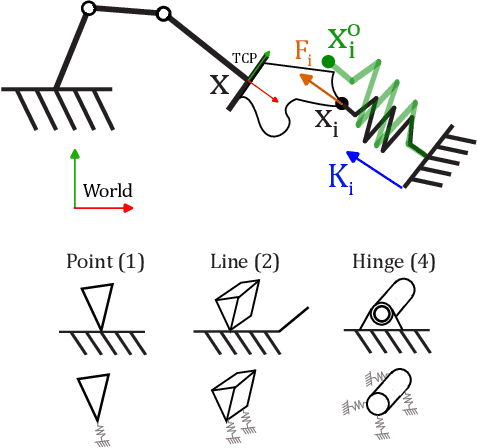
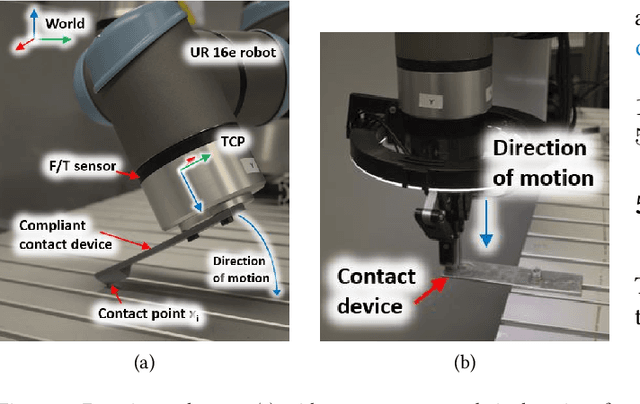
In contact-rich manipulation, the robot dynamics are coupled with an environment that has application-specific dynamic properties (stiffness, inertia) and geometry (contact normal). Knowledge of these environmental parameters can improve control and monitoring, but they are often unobserved and may vary, either online or between task instances. Observers, such as the extended Kalman filter, can be used to estimate these parameters, but such model-based techniques can require too much engineering work to scale up to complex environments, such as multi-point contact. To accelerate environment modeling, we propose environment primitives: parameterized environment dynamics that can be connected in parallel and are expressed in an automatic differentiation framework. This simplifies offline gradient-based optimization to fit model parameters and linearization of the coupled dynamics for an observer. This method is implemented for stiffness contact models, allowing the fitting of contact geometry and stiffness offline or their online estimation by an extended Kalman filter. This method is applied to a collaborative robot, estimating external force, contact stiffness, and contact geometry from the motor position and current. The estimates of external force and stiffness are compared with a momentum observer and direct force measurements.
Safe rendering of high impedance on a series-elastic actuator with disturbance observer-based torque control
Dec 03, 2019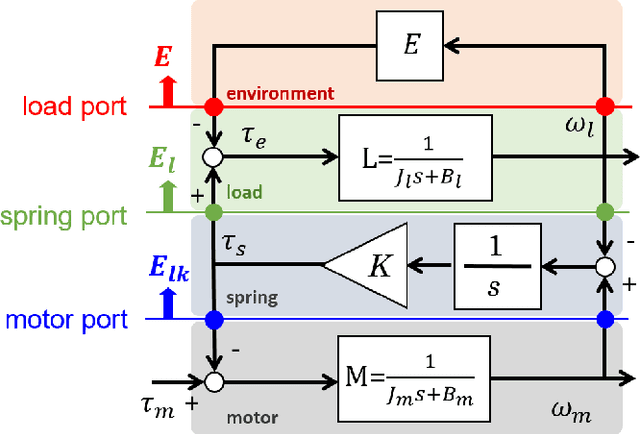
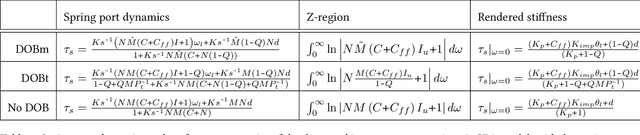
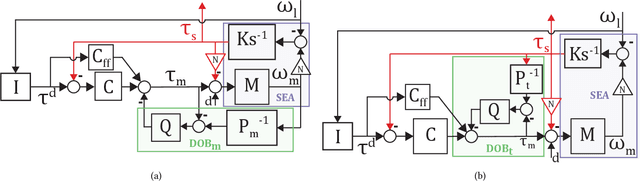
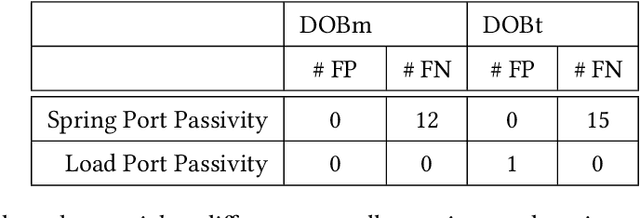
An important performance metric for series-elastic actuators is the range of impedance which they can safely render. Advanced torque control, using techniques such as the disturbance observer, improve torque tracking bandwidth and accuracy, but their impact on safe impedance range is not established. However, to define a safe impedance range requires a practical coupled stability condition. Here, passivity-based conditions are proposed for two variants of DOB torque control, and validated experimentally in a high-stiffness environment. While high-gain PD torque control has been shown to reduce Z-width, it is here shown that a DOB reduces the need for high-gain PD feedback and allows a higher rendered impedance. A dynamic feedforward compensator is proposed which increases the maximum safe impedance of the DOB, validated in experimentally in collision with high-stiffness environments and manual excitation.
Performance Analysis of Series Elastic Actuator based on Maximum Torque Transmissibility
Feb 14, 2019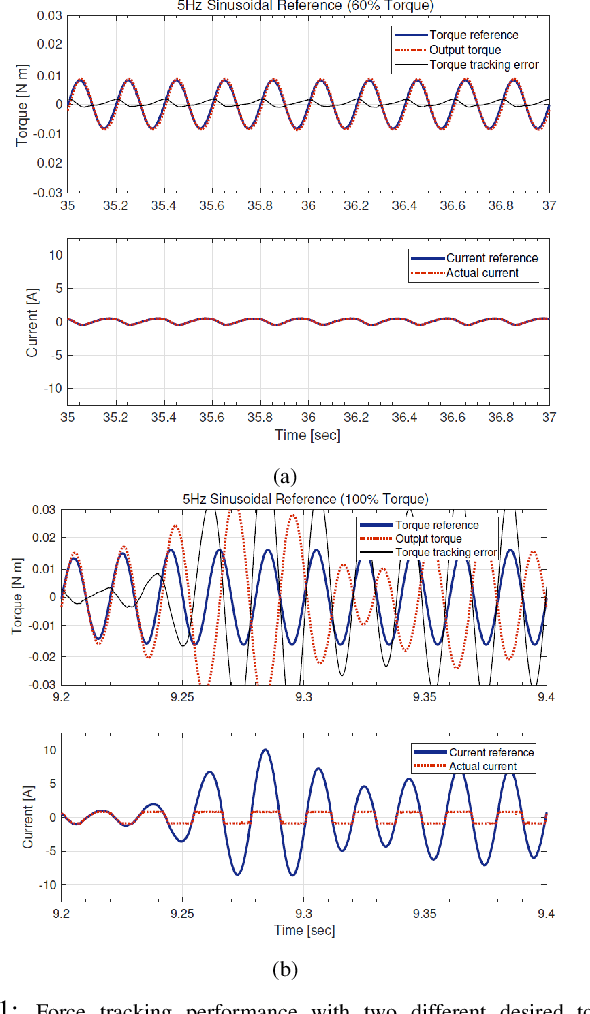
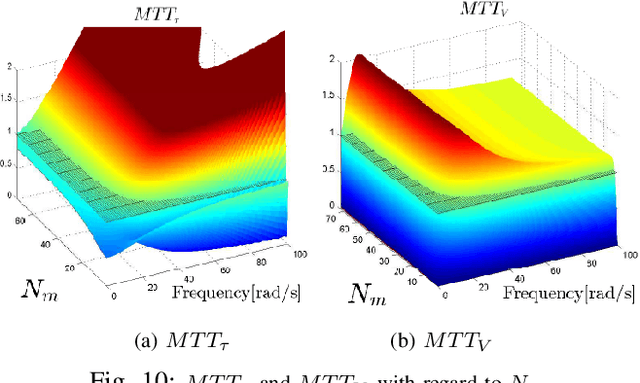
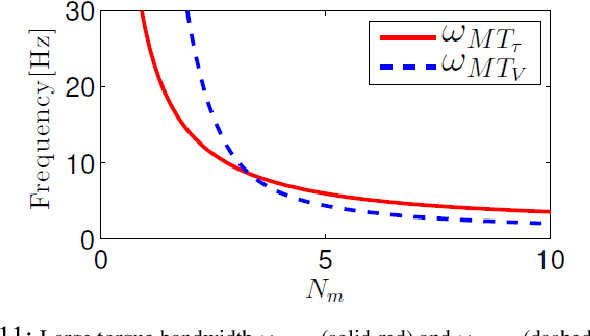
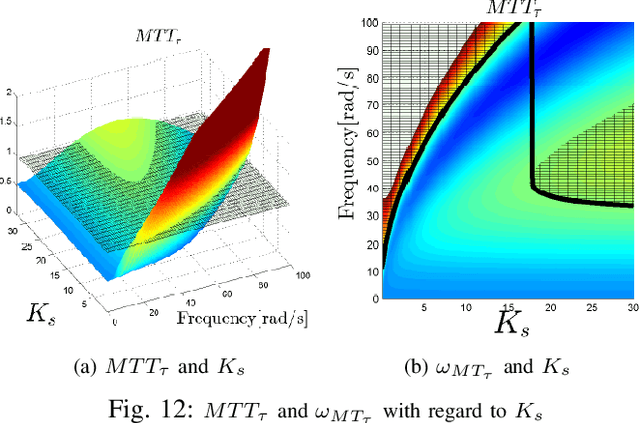
The use of the Series Elastic Actuator (SEA) system as an actuator system equipped with a compliant element has contributed not only to advances in human interacting robots but also to a wide range of improvements in the robotics area. Nevertheless, there are still limitations in its performance; the elastic spring that is adopted to provide compliance is considered to limit the actuator performance thus lowering the frequency bandwidth of force/torque generation, and the bandwidth decreases even more when it is supposed to provide large torque. This weakness is in turn owing to the limitations of motor and motor drives such as torque and velocity limits. In this paper, mathematical tools to analyze the impact of these limitations on the performance of SEA as a transmission system are provided. A novel criterion called Maximum Torque Transmissibility (MTT)is defined to assess the ability of SEA to fully utilize maximum continuous motor torque. Moreover, an original frequency bandwidth concept, maximum torque frequency bandwidth, which can indicate the maximum frequency up to which the SEA can generate the maximum torque, is proposed based on the proposed MTT. The proposed MTT can be utilized as a unique criterion of the performance, and thus various design parameters including the load condition, mechanical design parameters, and controller parameters of a SEA can be evaluated with its use. Experimental results under various conditions verify that MTT can precisely indicate the limitation of the performance of SEA, and that it can be utilized to accurately analyze the limitation of the controller of SEA.
Towards Accurate Force Control of Series Elastic Actuators Exploiting a Robust Transmission Force Observer
Feb 14, 2019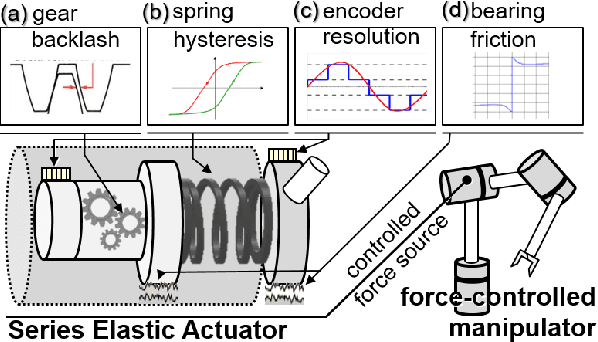
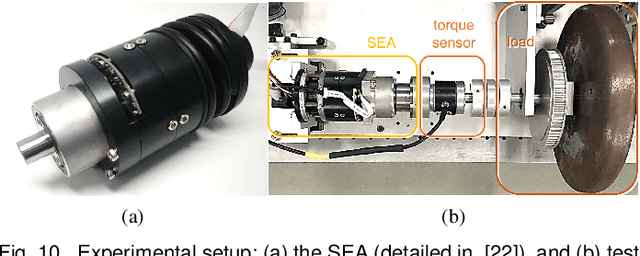
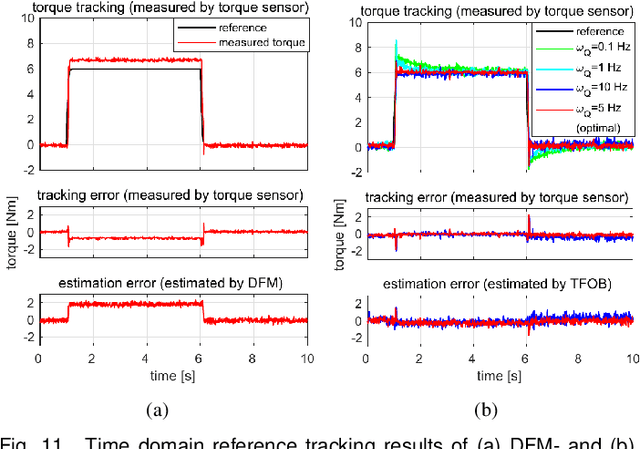
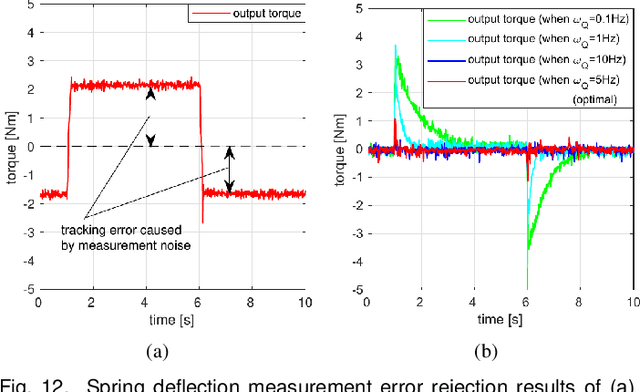
This paper develops an accurate force control algorithm for series elastic actuators (SEAs) based on a novel force estimation scheme, called transmission force observer (TFOB). The proposed method is designed to improve an inferior force measurement of the SEA caused by nonlinearities of the elastic transmission and measurement noise and error of its deformation sensor. This paper first analyzes the limitation of the conventional methods for the SEA transmission force sensing and then investigates its stochastic characteristics, which indeed provide the base to render the accurate force control performance incorporated with the TFOB. In particular, a tuning parameter is introduced from holistic closed-loop system analyses in the frequency domain. This gives a guideline to attain optimum performance of the force-controlled SEA system. The proposed algorithm is experimentally verified in an actual SEA hardware setup.