 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimon Boche
Scalable Autonomous Drone Flight in the Forest with Visual-Inertial SLAM and Dense Submaps Built without LiDAR
Mar 14, 2024
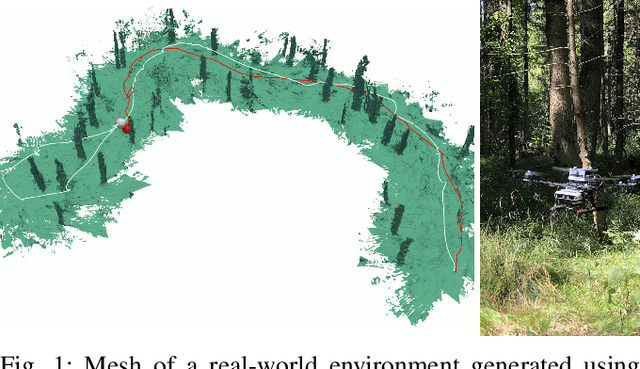
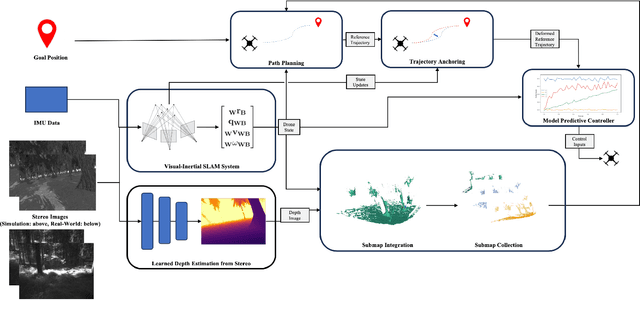
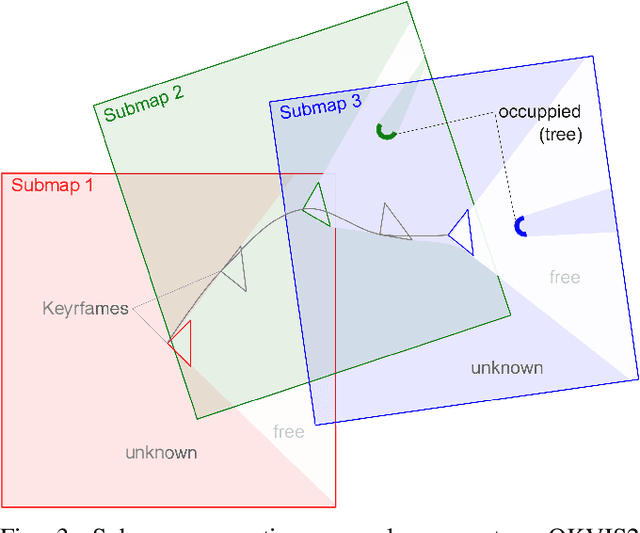
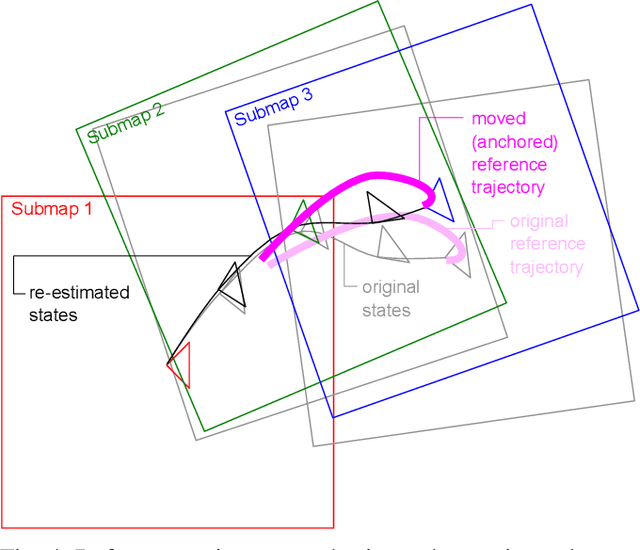
Forestry constitutes a key element for a sustainable future, while it is supremely challenging to introduce digital processes to improve efficiency. The main limitation is the difficulty of obtaining accurate maps at high temporal and spatial resolution as a basis for informed forestry decision-making, due to the vast area forests extend over and the sheer number of trees. To address this challenge, we present an autonomous Micro Aerial Vehicle (MAV) system which purely relies on cost-effective and light-weight passive visual and inertial sensors to perform under-canopy autonomous navigation. We leverage visual-inertial simultaneous localization and mapping (VI-SLAM) for accurate MAV state estimates and couple it with a volumetric occupancy submapping system to achieve a scalable mapping framework which can be directly used for path planning. As opposed to a monolithic map, submaps inherently deal with inevitable drift and corrections from VI-SLAM, since they move with pose estimates as they are updated. To ensure the safety of the MAV during navigation, we also propose a novel reference trajectory anchoring scheme that moves and deforms the reference trajectory the MAV is tracking upon state updates from the VI-SLAM system in a consistent way, even upon large changes in state estimates due to loop-closures. We thoroughly validate our system in both real and simulated forest environments with high tree densities in excess of 400 trees per hectare and at speeds up to 3 m/s - while not encountering a single collision or system failure. To the best of our knowledge this is the first system which achieves this level of performance in such unstructured environment using low-cost passive visual sensors and fully on-board computation including VI-SLAM.
Tightly-Coupled LiDAR-Visual-Inertial SLAM and Large-Scale Volumetric Occupancy Mapping
Mar 04, 2024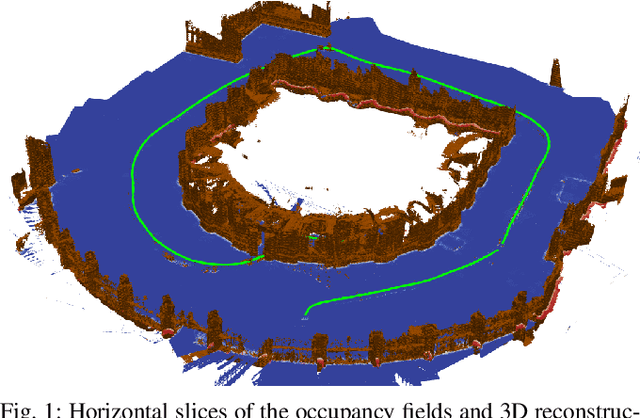
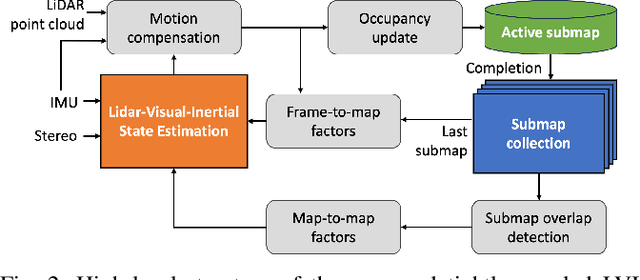
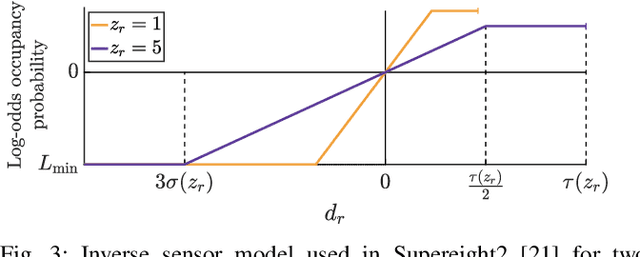
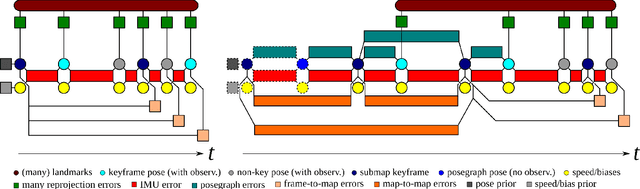
Autonomous navigation is one of the key requirements for every potential application of mobile robots in the real-world. Besides high-accuracy state estimation, a suitable and globally consistent representation of the 3D environment is indispensable. We present a fully tightly-coupled LiDAR-Visual-Inertial SLAM system and 3D mapping framework applying local submapping strategies to achieve scalability to large-scale environments. A novel and correspondence-free, inherently probabilistic, formulation of LiDAR residuals is introduced, expressed only in terms of the occupancy fields and its respective gradients. These residuals can be added to a factor graph optimisation problem, either as frame-to-map factors for the live estimates or as map-to-map factors aligning the submaps with respect to one another. Experimental validation demonstrates that the approach achieves state-of-the-art pose accuracy and furthermore produces globally consistent volumetric occupancy submaps which can be directly used in downstream tasks such as navigation or exploration.
Visual-Inertial SLAM with Tightly-Coupled Dropout-Tolerant GPS Fusion
Aug 01, 2022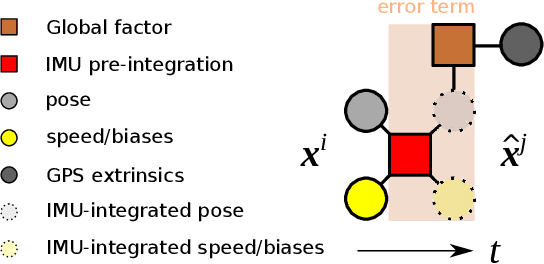
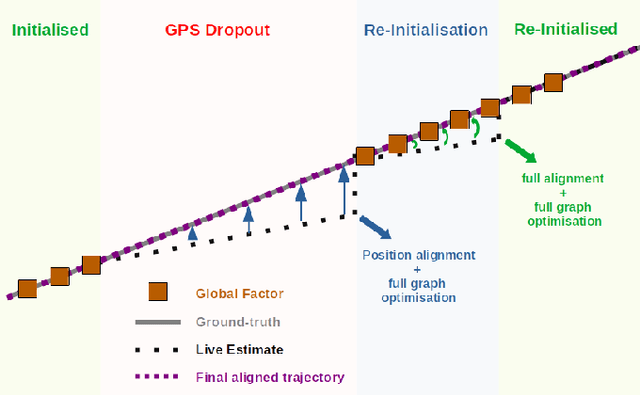

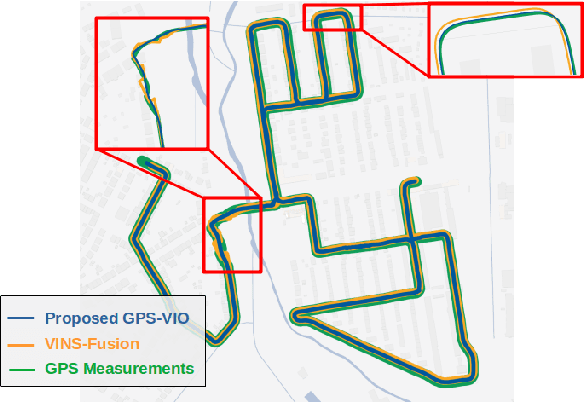
Robotic applications are continuously striving towards higher levels of autonomy. To achieve that goal, a highly robust and accurate state estimation is indispensable. Combining visual and inertial sensor modalities has proven to yield accurate and locally consistent results in short-term applications. Unfortunately, visual-inertial state estimators suffer from the accumulation of drift for long-term trajectories. To eliminate this drift, global measurements can be fused into the state estimation pipeline. The most known and widely available source of global measurements is the Global Positioning System (GPS). In this paper, we propose a novel approach that fully combines stereo Visual-Inertial Simultaneous Localisation and Mapping (SLAM), including visual loop closures, with the fusion of global sensor modalities in a tightly-coupled and optimisation-based framework. Incorporating measurement uncertainties, we provide a robust criterion to solve the global reference frame initialisation problem. Furthermore, we propose a loop-closure-like optimisation scheme to compensate drift accumulated during outages in receiving GPS signals. Experimental validation on datasets and in a real-world experiment demonstrates the robustness of our approach to GPS dropouts as well as its capability to estimate highly accurate and globally consistent trajectories compared to existing state-of-the-art methods.