 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSiqi Gao
View-Centric Multi-Object Tracking with Homographic Matching in Moving UAV
Mar 16, 2024

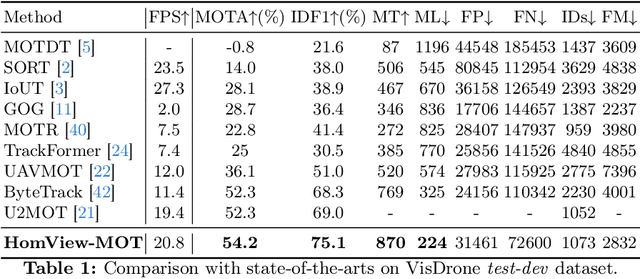
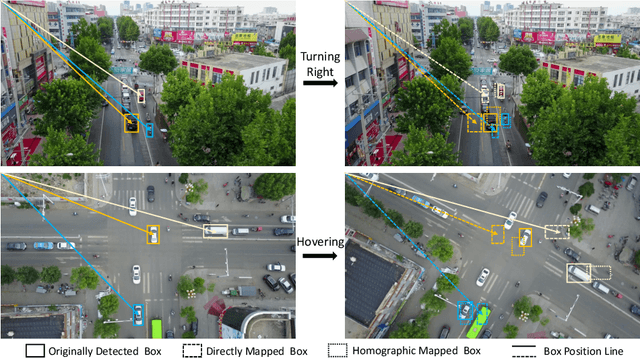
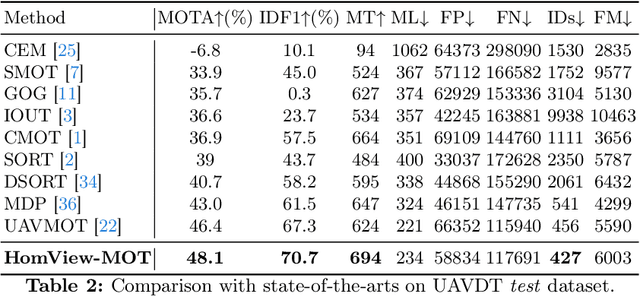
In this paper, we address the challenge of multi-object tracking (MOT) in moving Unmanned Aerial Vehicle (UAV) scenarios, where irregular flight trajectories, such as hovering, turning left/right, and moving up/down, lead to significantly greater complexity compared to fixed-camera MOT. Specifically, changes in the scene background not only render traditional frame-to-frame object IOU association methods ineffective but also introduce significant view shifts in the objects, which complicates tracking. To overcome these issues, we propose a novel universal HomView-MOT framework, which for the first time, harnesses the view Homography inherent in changing scenes to solve MOT challenges in moving environments, incorporating Homographic Matching and View-Centric concepts. We introduce a Fast Homography Estimation (FHE) algorithm for rapid computation of Homography matrices between video frames, enabling object View-Centric ID Learning (VCIL) and leveraging multi-view Homography to learn cross-view ID features. Concurrently, our Homographic Matching Filter (HMF) maps object bounding boxes from different frames onto a common view plane for a more realistic physical IOU association. Extensive experiments have proven that these innovations allow HomView-MOT to achieve state-of-the-art performance on prominent UAV MOT datasets VisDrone and UAVDT.
ChangeNet: Multi-Temporal Asymmetric Change Detection Dataset
Dec 29, 2023Change Detection (CD) has been attracting extensive interests with the availability of bi-temporal datasets. However, due to the huge cost of multi-temporal images acquisition and labeling, existing change detection datasets are small in quantity, short in temporal, and low in practicability. Therefore, a large-scale practical-oriented dataset covering wide temporal phases is urgently needed to facilitate the community. To this end, the ChangeNet dataset is presented especially for multi-temporal change detection, along with the new task of ``Asymmetric Change Detection". Specifically, ChangeNet consists of 31,000 multi-temporal images pairs, a wide range of complex scenes from 100 cities, and 6 pixel-level annotated categories, which is far superior to all the existing change detection datasets including LEVIR-CD, WHU Building CD, etc.. In addition, ChangeNet contains amounts of real-world perspective distortions in different temporal phases on the same areas, which is able to promote the practical application of change detection algorithms. The ChangeNet dataset is suitable for both binary change detection (BCD) and semantic change detection (SCD) tasks. Accordingly, we benchmark the ChangeNet dataset on six BCD methods and two SCD methods, and extensive experiments demonstrate its challenges and great significance. The dataset is available at https://github.com/jankyee/ChangeNet.