 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStefano Nichele
Information encoding and decoding in in-vitro neural networks on micro electrode arrays through stimulation timing
Apr 16, 2024
A primary challenge in utilizing in-vitro biological neural networks for computations is finding good encoding and decoding schemes for inputting and decoding data to and from the networks. Furthermore, identifying the optimal parameter settings for a given combination of encoding and decoding schemes adds additional complexity to this challenge. In this study we explore stimulation timing as an encoding method, i.e. we encode information as the delay between stimulation pulses and identify the bounds and acuity of stimulation timings which produce linearly separable spike responses. We also examine the optimal readout parameters for a linear decoder in the form of epoch length, time bin size and epoch offset. Our results suggest that stimulation timings between 36 and 436ms may be optimal for encoding and that different combinations of readout parameters may be optimal at different parts of the evoked spike response.
Optimization of a Hydrodynamic Computational Reservoir through Evolution
Apr 20, 2023



As demand for computational resources reaches unprecedented levels, research is expanding into the use of complex material substrates for computing. In this study, we interface with a model of a hydrodynamic system, under development by a startup, as a computational reservoir and optimize its properties using an evolution in materio approach. Input data are encoded as waves applied to our shallow water reservoir, and the readout wave height is obtained at a fixed detection point. We optimized the readout times and how inputs are mapped to the wave amplitude or frequency using an evolutionary search algorithm, with the objective of maximizing the system's ability to linearly separate observations in the training data by maximizing the readout matrix determinant. Applying evolutionary methods to this reservoir system substantially improved separability on an XNOR task, in comparison to implementations with hand-selected parameters. We also applied our approach to a regression task and show that our approach improves out-of-sample accuracy. Results from this study will inform how we interface with the physical reservoir in future work, and we will use these methods to continue to optimize other aspects of the physical implementation of this system as a computational reservoir.
Local learning through propagation delays in spiking neural networks
Oct 27, 2022



We propose a novel local learning rule for spiking neural networks in which spike propagation times undergo activity-dependent plasticity. Our plasticity rule aligns pre-synaptic spike times to produce a stronger and more rapid response. Inputs are encoded by latency coding and outputs decoded by matching similar patterns of output spiking activity. We demonstrate the use of this method in a three-layer feedfoward network with inputs from a database of handwritten digits. Networks consistently improve their classification accuracy after training, and training with this method also allowed networks to generalize to an input class unseen during training. Our proposed method takes advantage of the ability of spiking neurons to support many different time-locked sequences of spikes, each of which can be activated by different input activations. The proof-of-concept shown here demonstrates the great potential for local delay learning to expand the memory capacity and generalizability of spiking neural networks.
Assessing the robustness of critical behavior in stochastic cellular automata
Aug 01, 2022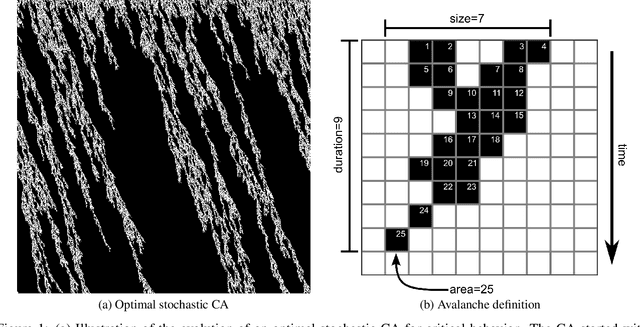
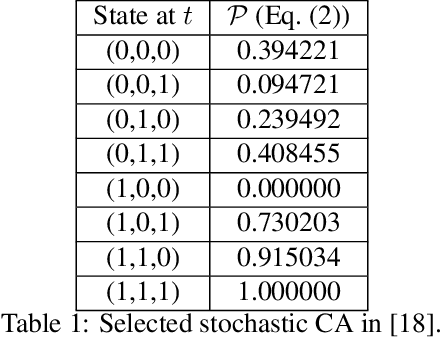
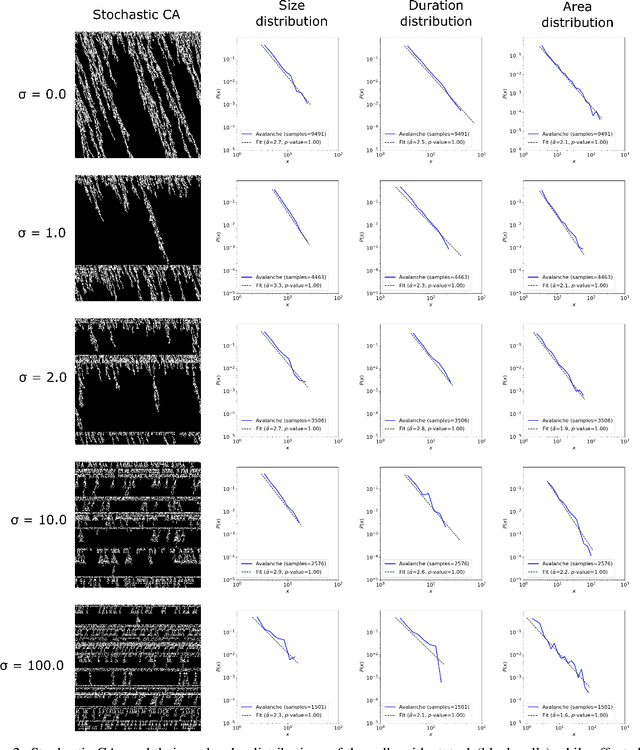
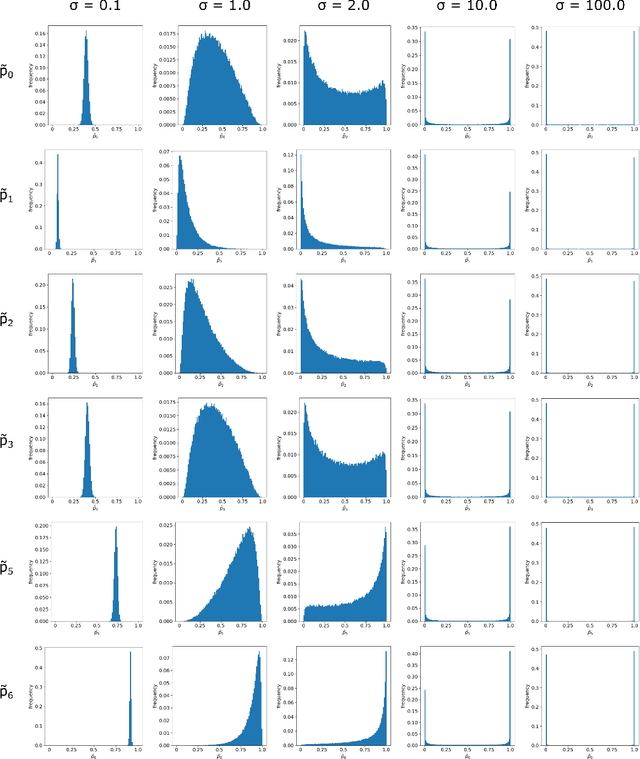
There is evidence that biological systems, such as the brain, work at a critical regime robust to noise, and are therefore able to remain in it under perturbations. In this work, we address the question of robustness of critical systems to noise. In particular, we investigate the robustness of stochastic cellular automata (CAs) at criticality. A stochastic CA is one of the simplest stochastic models showing criticality. The transition state of stochastic CA is defined through a set of probabilities. We systematically perturb the probabilities of an optimal stochastic CA known to produce critical behavior, and we report that such a CA is able to remain in a critical regime up to a certain degree of noise. We present the results using error metrics of the resulting power-law fitting, such as Kolmogorov-Smirnov statistic and Kullback-Leibler divergence. We discuss the implication of our results in regards to future realization of brain-inspired artificial intelligence systems.
Towards the Neuroevolution of Low-level Artificial General Intelligence
Jul 27, 2022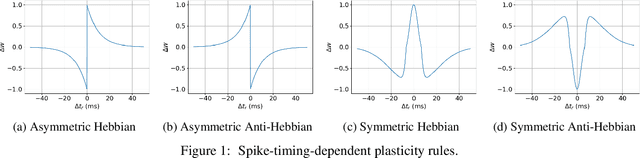
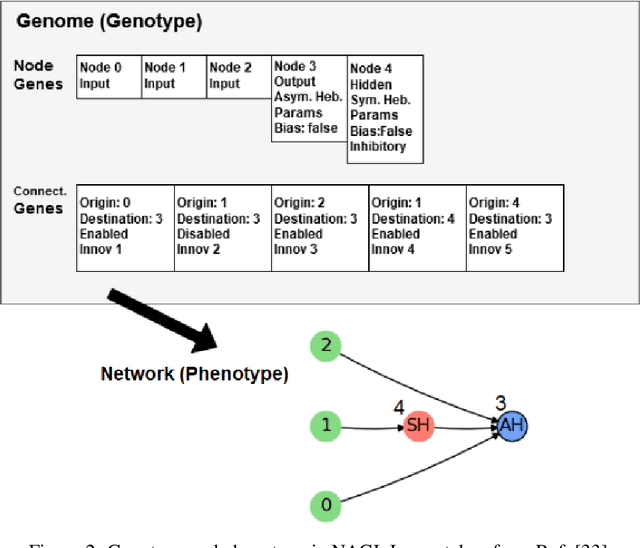
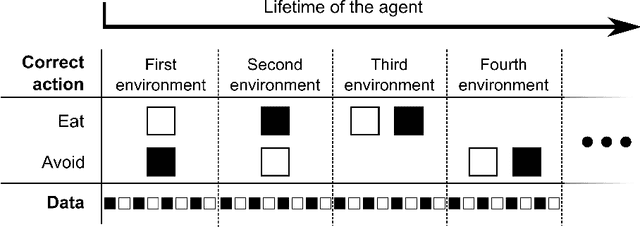
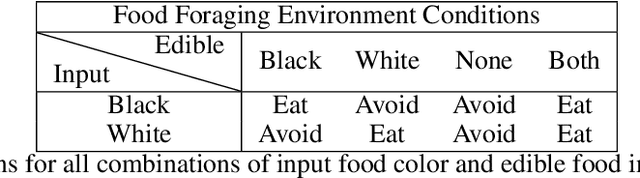
In this work, we argue that the search for Artificial General Intelligence (AGI) should start from a much lower level than human-level intelligence. The circumstances of intelligent behavior in nature resulted from an organism interacting with its surrounding environment, which could change over time and exert pressure on the organism to allow for learning of new behaviors or environment models. Our hypothesis is that learning occurs through interpreting sensory feedback when an agent acts in an environment. For that to happen, a body and a reactive environment are needed. We evaluate a method to evolve a biologically-inspired artificial neural network that learns from environment reactions named Neuroevolution of Artificial General Intelligence (NAGI), a framework for low-level AGI. This method allows the evolutionary complexification of a randomly-initialized spiking neural network with adaptive synapses, which controls agents instantiated in mutable environments. Such a configuration allows us to benchmark the adaptivity and generality of the controllers. The chosen tasks in the mutable environments are food foraging, emulation of logic gates, and cart-pole balancing. The three tasks are successfully solved with rather small network topologies and therefore it opens up the possibility of experimenting with more complex tasks and scenarios where curriculum learning is beneficial.
Collective control of modular soft robots via embodied Spiking Neural Cellular Automata
Apr 05, 2022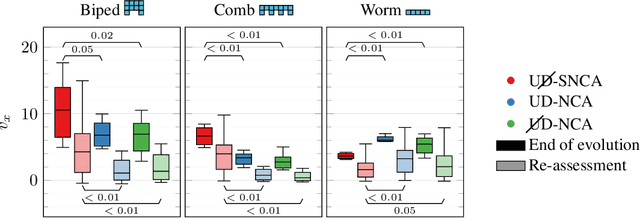
Voxel-based Soft Robots (VSRs) are a form of modular soft robots, composed of several deformable cubes, i.e., voxels. Each VSR is thus an ensemble of simple agents, namely the voxels, which must cooperate to give rise to the overall VSR behavior. Within this paradigm, collective intelligence plays a key role in enabling the emerge of coordination, as each voxel is independently controlled, exploiting only the local sensory information together with some knowledge passed from its direct neighbors (distributed or collective control). In this work, we propose a novel form of collective control, influenced by Neural Cellular Automata (NCA) and based on the bio-inspired Spiking Neural Networks: the embodied Spiking NCA (SNCA). We experiment with different variants of SNCA, and find them to be competitive with the state-of-the-art distributed controllers for the task of locomotion. In addition, our findings show significant improvement with respect to the baseline in terms of adaptability to unforeseen environmental changes, which could be a determining factor for physical practicability of VSRs.
A Unified Substrate for Body-Brain Co-evolution
Mar 22, 2022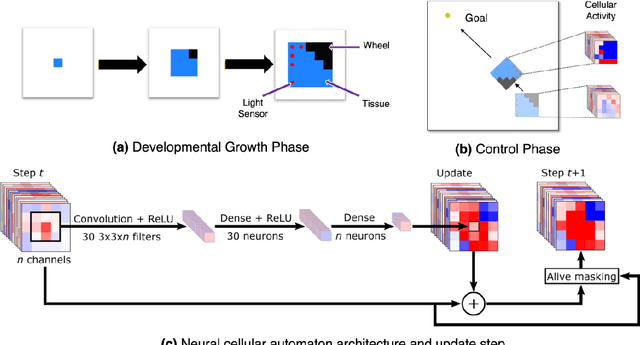
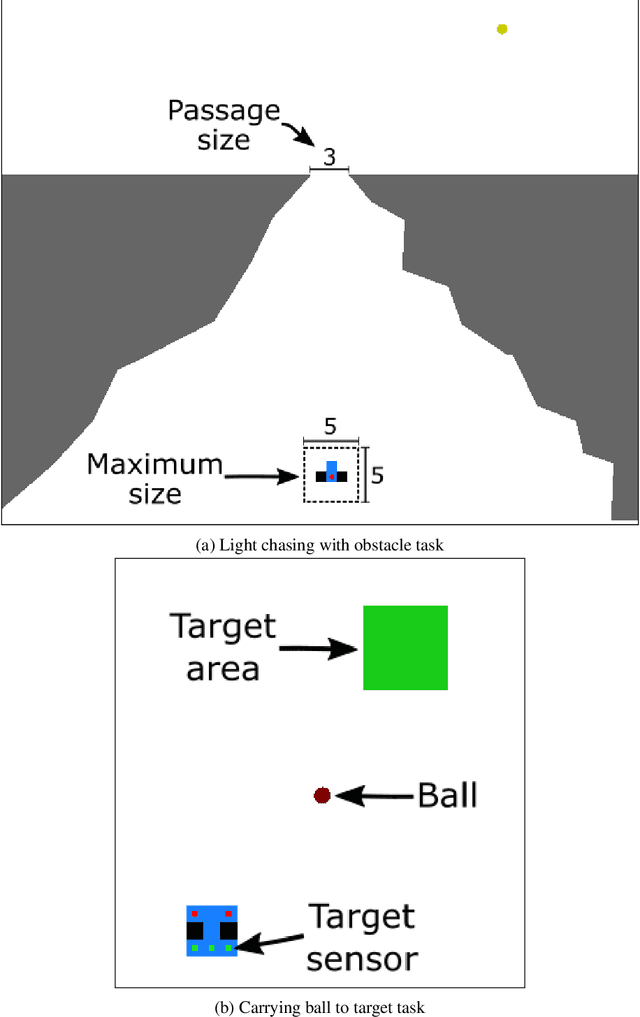
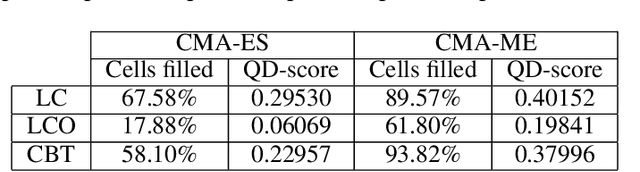
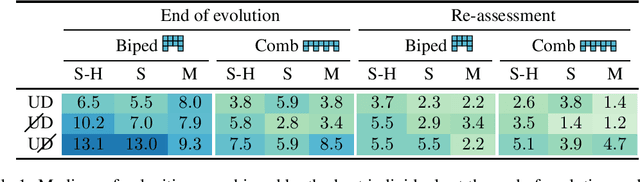
A successful development of a complex multicellular organism took millions of years of evolution. The genome of such a multicellular organism guides the development of its body from a single cell, including its control system. Our goal is to imitate this natural process using a single neural cellular automaton (NCA) as a genome for modular robotic agents. In the introduced approach, called Neural Cellular Robot Substrate (NCRS), a single NCA guides the growth of a robot and the cellular activity which controls the robot during deployment. We also introduce three benchmark environments, which test the ability of the approach to grow different robot morphologies. We evolve the NCRS with covariance matrix adaptation evolution strategy (CMA-ES), and covariance matrix adaptation MAP-Elites (CMA-ME) for quality diversity and observe that CMA-ME generates more diverse robot morphologies with higher fitness scores. While the NCRS is able to solve the easier tasks in the benchmark, the success rate reduces when the difficulty of the task increases. We discuss directions for future work that may facilitate the use of the NCRS approach for more complex domains.
AI-based artistic representation of emotions from EEG signals: a discussion on fairness, inclusion, and aesthetics
Feb 07, 2022



While Artificial Intelligence (AI) technologies are being progressively developed, artists and researchers are investigating their role in artistic practices. In this work, we present an AI-based Brain-Computer Interface (BCI) in which humans and machines interact to express feelings artistically. This system and its production of images give opportunities to reflect on the complexities and range of human emotions and their expressions. In this discussion, we seek to understand the dynamics of this interaction to reach better co-existence in fairness, inclusion, and aesthetics.
Evolving spiking neuron cellular automata and networks to emulate in vitro neuronal activity
Oct 15, 2021



Neuro-inspired models and systems have great potential for applications in unconventional computing. Often, the mechanisms of biological neurons are modeled or mimicked in simulated or physical systems in an attempt to harness some of the computational power of the brain. However, the biological mechanisms at play in neural systems are complicated and challenging to capture and engineer; thus, it can be simpler to turn to a data-driven approach to transfer features of neural behavior to artificial substrates. In the present study, we used an evolutionary algorithm (EA) to produce spiking neural systems that emulate the patterns of behavior of biological neurons in vitro. The aim of this approach was to develop a method of producing models capable of exhibiting complex behavior that may be suitable for use as computational substrates. Our models were able to produce a level of network-wide synchrony and showed a range of behaviors depending on the target data used for their evolution, which was from a range of neuronal culture densities and maturities. The genomes of the top-performing models indicate the excitability and density of connections in the model play an important role in determining the complexity of the produced activity.
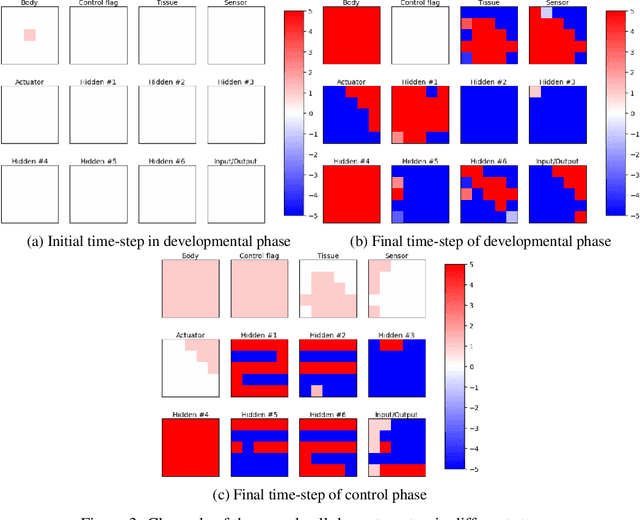
Towards self-organized control: Using neural cellular automata to robustly control a cart-pole agent
Jul 12, 2021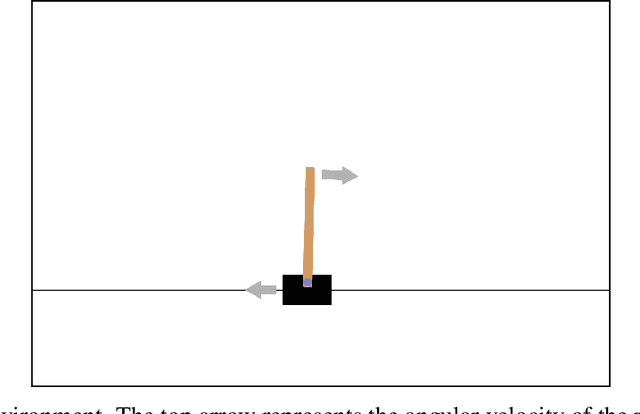

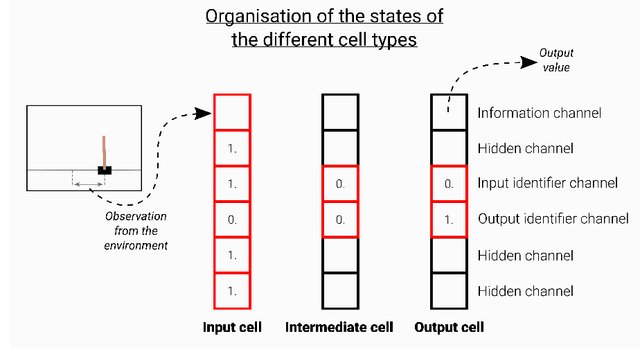

Neural cellular automata (Neural CA) are a recent framework used to model biological phenomena emerging from multicellular organisms. In these systems, artificial neural networks are used as update rules for cellular automata. Neural CA are end-to-end differentiable systems where the parameters of the neural network can be learned to achieve a particular task. In this work, we used neural CA to control a cart-pole agent. The observations of the environment are transmitted in input cells, while the values of output cells are used as a readout of the system. We trained the model using deep-Q learning, where the states of the output cells were used as the Q-value estimates to be optimized. We found that the computing abilities of the cellular automata were maintained over several hundreds of thousands of iterations, producing an emergent stable behavior in the environment it controls for thousands of steps. Moreover, the system demonstrated life-like phenomena such as a developmental phase, regeneration after damage, stability despite a noisy environment, and robustness to unseen disruption such as input deletion.