 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThomas Bamford
Aerial Rock Fragmentation Analysis in Low-Light Condition Using UAV Technology
Aug 21, 2017
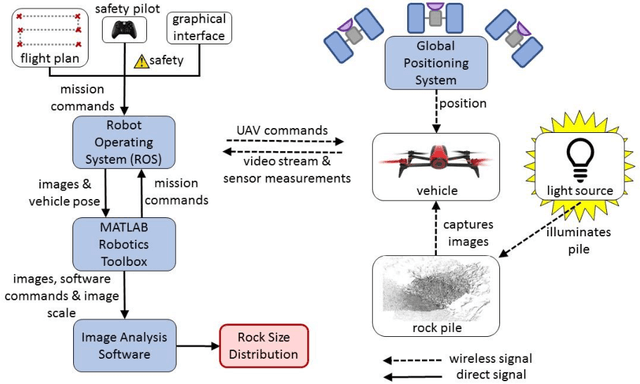
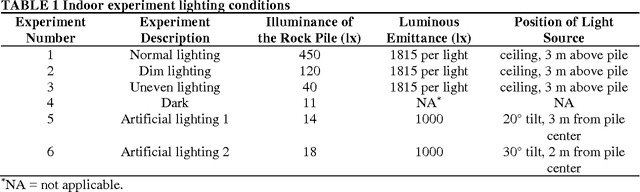


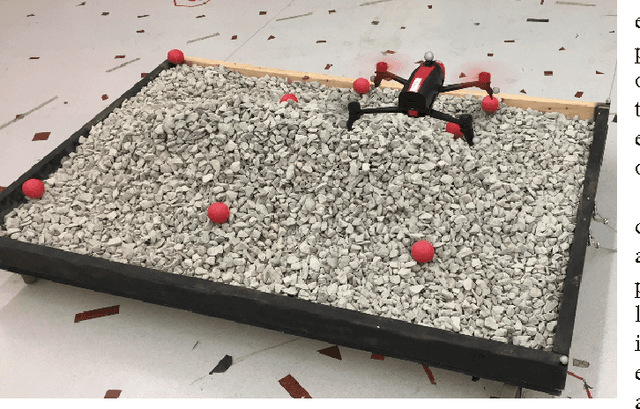
In recent years, Unmanned Aerial Vehicle (UAV) technology has been introduced into the mining industry to conduct terrain surveying. This work investigates the application of UAVs with artificial lighting for measurement of rock fragmentation under poor lighting conditions, representing night shifts in surface mines or working conditions in underground mines. The study relies on indoor and outdoor experiments for rock fragmentation analysis using a quadrotor UAV. Comparison of the rock size distributions in both cases show that adequate artificial lighting enables similar accuracy to ideal lighting conditions.
Point-Cloud-Based Aerial Fragmentation Analysis for Application in the Minerals Industry
Jul 26, 2017
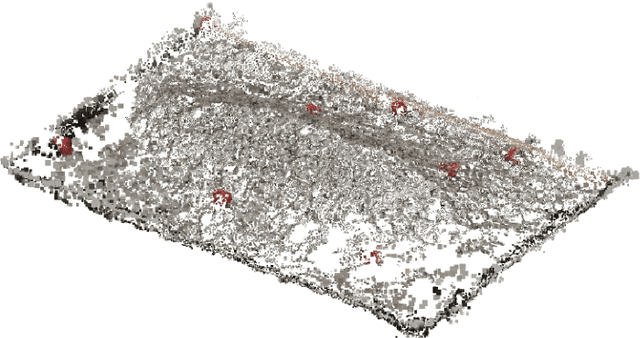
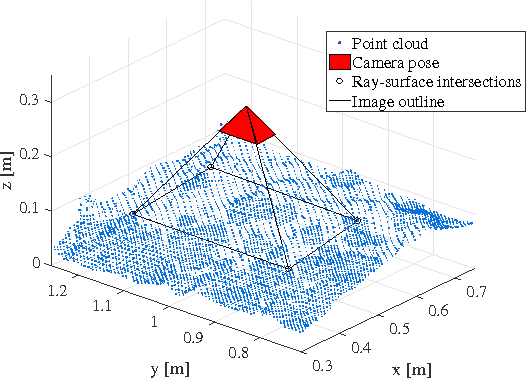
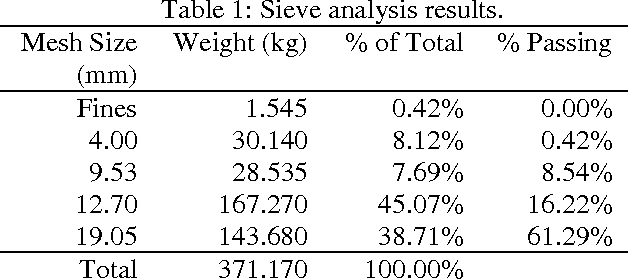
This work investigates the application of Unmanned Aerial Vehicle (UAV) technology for measurement of rock fragmentation without placement of scale objects in the scene to determine image scale. Commonly practiced image-based rock fragmentation analysis requires a technician to walk to a rock pile, place a scale object of known size in the area of interest, and capture individual 2D images. Our previous work has used UAV technology for the first time to acquire real-time rock fragmentation data and has shown comparable quality of results; however, it still required the (potentially dangerous) placement of scale objects, and continued to make the assumption that the rock pile surface is planar and that the scale objects lie on the surface plane. This work improves our UAV-based approach to enable rock fragmentation measurement without placement of scale objects and without the assumption of planarity. This is achieved by first generating a point cloud of the rock pile from 2D images, taking into account intrinsic and extrinsic camera parameters, and then taking 2D images for fragmentation analysis. This work represents an important step towards automating post-blast rock fragmentation analysis. In experiments, a rock pile with known size distribution was photographed by the UAV with and without using scale objects. For fragmentation analysis without scale objects, a point cloud of the rock pile was generated and used to compute image scale. Comparison of the rock size distributions show that this point-cloud-based method enables producing measurements with better or comparable accuracy (within 10% of the ground truth) to the manual method with scale objects.
A real-time analysis of rock fragmentation using UAV technology
Jul 14, 2016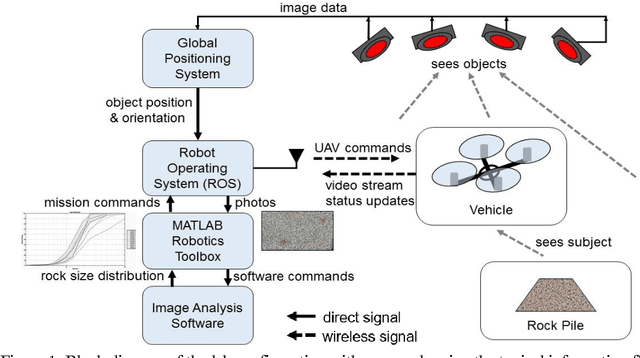
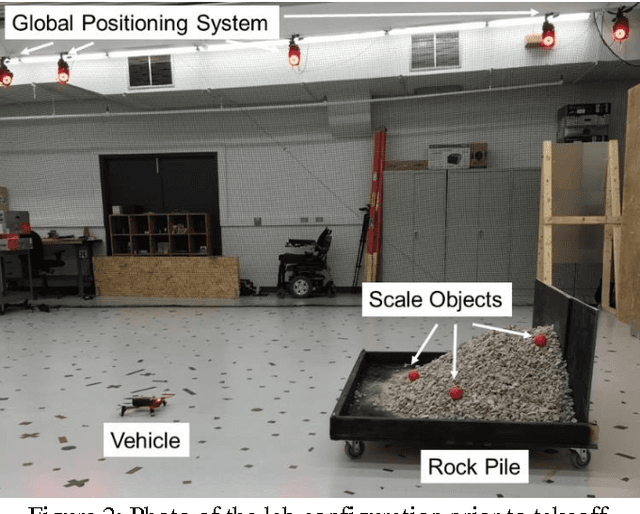
Accurate measurement of blast-induced rock fragmentation is of great importance for many mining operations. The post-blast rock size distribution can significantly influence the efficiency of all the downstream mining and comminution processes. Image analysis methods are one of the most common methods used to measure rock fragment size distribution in mines regardless of criticism for lack of accuracy to measure fine particles and other perceived deficiencies. The current practice of collecting rock fragmentation data for image analysis is highly manual and provides data with low temporal and spatial resolution. Using UAVs for collecting images of rock fragments can not only improve the quality of the image data but also automate the data collection process. Ultimately, real-time acquisition of high temporal- and spatial-resolution data based on UAV technology will provide a broad range of opportunities for both improving blast design without interrupting the production process and reducing the cost of the human operator. This paper presents the results of a series of laboratory-scale rock fragment measurements using a quadrotor UAV equipped with a camera. The goal of this work is to highlight the benefits of aerial fragmentation analysis in terms of both prediction accuracy and time effort. A pile of rock fragments with different fragment sizes was placed in a lab that is equipped with a motion capture camera system for precise UAV localization and control. Such an environment presents optimal conditions for UAV flight and thus, is well-suited for conducting proof-of-concept experiments before testing them in large-scale field experiments. The pile was photographed by a camera attached to the UAV, and the particle size distribution curves were generated in almost real-time. The pile was also manually photographed and the results of the manual method were compared to the UAV method.