 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeValerio Modugno
DVN-SLAM: Dynamic Visual Neural SLAM Based on Local-Global Encoding
Mar 18, 2024
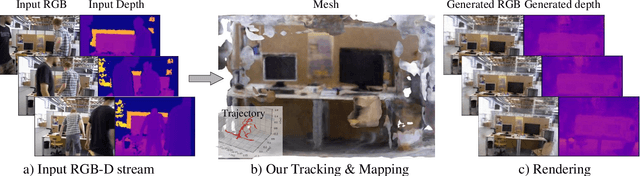
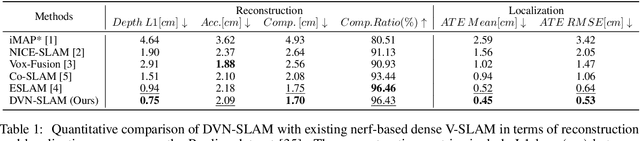
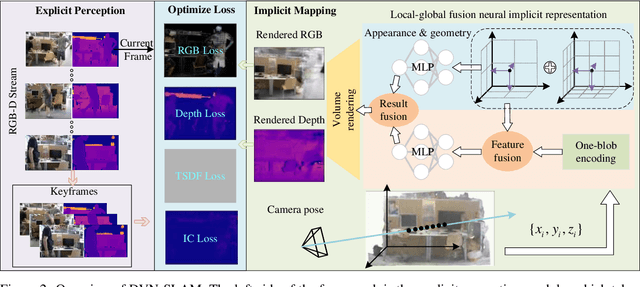
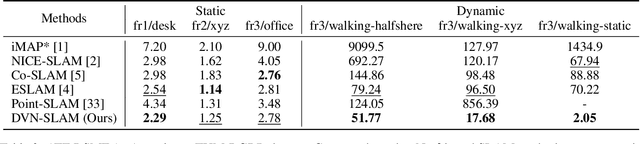
Recent research on Simultaneous Localization and Mapping (SLAM) based on implicit representation has shown promising results in indoor environments. However, there are still some challenges: the limited scene representation capability of implicit encodings, the uncertainty in the rendering process from implicit representations, and the disruption of consistency by dynamic objects. To address these challenges, we propose a real-time dynamic visual SLAM system based on local-global fusion neural implicit representation, named DVN-SLAM. To improve the scene representation capability, we introduce a local-global fusion neural implicit representation that enables the construction of an implicit map while considering both global structure and local details. To tackle uncertainties arising from the rendering process, we design an information concentration loss for optimization, aiming to concentrate scene information on object surfaces. The proposed DVN-SLAM achieves competitive performance in localization and mapping across multiple datasets. More importantly, DVN-SLAM demonstrates robustness in dynamic scenes, a trait that sets it apart from other NeRF-based methods.
On the Benefits of GPU Sample-Based Stochastic Predictive Controllers for Legged Locomotion
Mar 18, 2024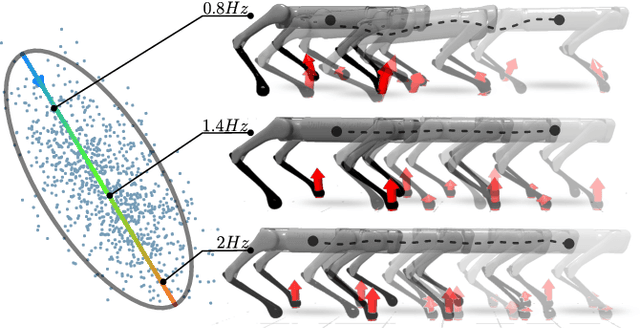
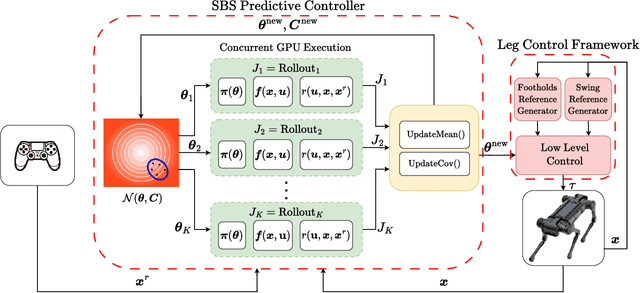
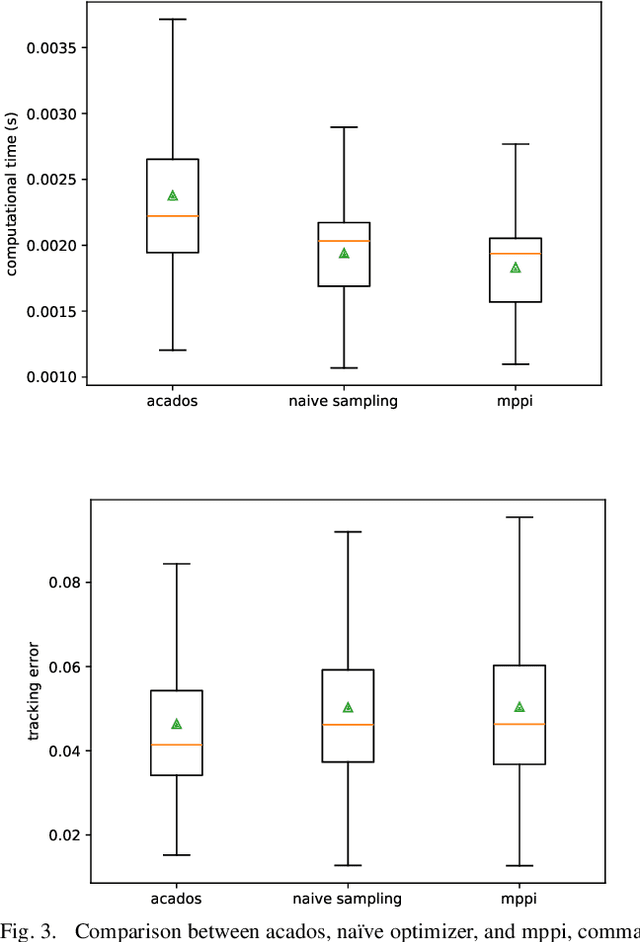
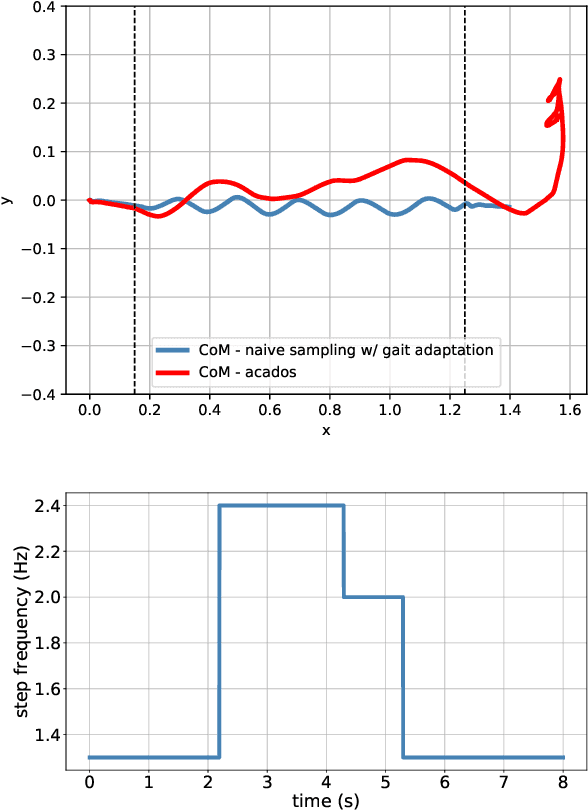
Quadrupedal robots excel in mobility, navigating complex terrains with agility. However, their complex control systems present challenges that are still far from being fully addressed. In this paper, we introduce the use of Sample-Based Stochastic control strategies for quadrupedal robots, as an alternative to traditional optimal control laws. We show that Sample-Based Stochastic methods, supported by GPU acceleration, can be effectively applied to real quadruped robots. In particular, in this work, we focus on achieving gait frequency adaptation, a notable challenge in quadrupedal locomotion for gradient-based methods. To validate the effectiveness of Sample-Based Stochastic controllers we test two distinct approaches for quadrupedal robots and compare them against a conventional gradient-based Model Predictive Control system. Our findings, validated both in simulation and on a real 21Kg Aliengo quadruped, demonstrate that our method is on par with a traditional Model Predictive Control strategy when the robot is subject to zero or moderate disturbance, while it surpasses gradient-based methods in handling sustained external disturbances, thanks to the straightforward gait adaptation strategy that is possible to achieve within their formulation.
ViT-A*: Legged Robot Path Planning using Vision Transformer A*
Oct 11, 2023



Legged robots, particularly quadrupeds, offer promising navigation capabilities, especially in scenarios requiring traversal over diverse terrains and obstacle avoidance. This paper addresses the challenge of enabling legged robots to navigate complex environments effectively through the integration of data-driven path-planning methods. We propose an approach that utilizes differentiable planners, allowing the learning of end-to-end global plans via a neural network for commanding quadruped robots. The approach leverages 2D maps and obstacle specifications as inputs to generate a global path. To enhance the functionality of the developed neural network-based path planner, we use Vision Transformers (ViT) for map pre-processing, to enable the effective handling of larger maps. Experimental evaluations on two real robotic quadrupeds (Boston Dynamics Spot and Unitree Go1) demonstrate the effectiveness and versatility of the proposed approach in generating reliable path plans.
* 6 pages, 6 figures, conference
End-to-End Stable Imitation Learning via Autonomous Neural Dynamic Policies
May 22, 2023



State-of-the-art sensorimotor learning algorithms offer policies that can often produce unstable behaviors, damaging the robot and/or the environment. Traditional robot learning, on the contrary, relies on dynamical system-based policies that can be analyzed for stability/safety. Such policies, however, are neither flexible nor generic and usually work only with proprioceptive sensor states. In this work, we bridge the gap between generic neural network policies and dynamical system-based policies, and we introduce Autonomous Neural Dynamic Policies (ANDPs) that: (a) are based on autonomous dynamical systems, (b) always produce asymptotically stable behaviors, and (c) are more flexible than traditional stable dynamical system-based policies. ANDPs are fully differentiable, flexible generic-policies that can be used in imitation learning setups while ensuring asymptotic stability. In this paper, we explore the flexibility and capacity of ANDPs in several imitation learning tasks including experiments with image observations. The results show that ANDPs combine the benefits of both neural network-based and dynamical system-based methods.
Local Navigation Among Movable Obstacles with Deep Reinforcement Learning
Mar 04, 2023



Autonomous robots would benefit a lot by gaining the ability to manipulate their environment to solve path planning tasks, known as the Navigation Among Movable Obstacle (NAMO) problem. In this paper, we present a deep reinforcement learning approach for solving NAMO locally, near narrow passages. We train parallel agents in physics simulation using an Advantage Actor-Critic based algorithm with a multi-modal neural network. We present an online policy that is able to push obstacles in a non-axial-aligned fashion, react to unexpected obstacle dynamics in real-time, and solve the local NAMO problem. Experimental validation in simulation shows that the presented approach generalises to unseen NAMO problems in unknown environments. We further demonstrate the implementation of the policy on a real quadrupedal robot, showing that the policy can deal with real-world sensor noises and uncertainties in unseen NAMO tasks.