 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYang Su
Integrating Active Learning in Causal Inference with Interference: A Novel Approach in Online Experiments
Feb 20, 2024
In the domain of causal inference research, the prevalent potential outcomes framework, notably the Rubin Causal Model (RCM), often overlooks individual interference and assumes independent treatment effects. This assumption, however, is frequently misaligned with the intricate realities of real-world scenarios, where interference is not merely a possibility but a common occurrence. Our research endeavors to address this discrepancy by focusing on the estimation of direct and spillover treatment effects under two assumptions: (1) network-based interference, where treatments on neighbors within connected networks affect one's outcomes, and (2) non-random treatment assignments influenced by confounders. To improve the efficiency of estimating potentially complex effects functions, we introduce an novel active learning approach: Active Learning in Causal Inference with Interference (ACI). This approach uses Gaussian process to flexibly model the direct and spillover treatment effects as a function of a continuous measure of neighbors' treatment assignment. The ACI framework sequentially identifies the experimental settings that demand further data. It further optimizes the treatment assignments under the network interference structure using genetic algorithms to achieve efficient learning outcome. By applying our method to simulation data and a Tencent game dataset, we demonstrate its feasibility in achieving accurate effects estimations with reduced data requirements. This ACI approach marks a significant advancement in the realm of data efficiency for causal inference, offering a robust and efficient alternative to traditional methodologies, particularly in scenarios characterized by complex interference patterns.
Voice2Action: Language Models as Agent for Efficient Real-Time Interaction in Virtual Reality
Sep 29, 2023Large Language Models (LLMs) are trained and aligned to follow natural language instructions with only a handful of examples, and they are prompted as task-driven autonomous agents to adapt to various sources of execution environments. However, deploying agent LLMs in virtual reality (VR) has been challenging due to the lack of efficiency in online interactions and the complex manipulation categories in 3D environments. In this work, we propose Voice2Action, a framework that hierarchically analyzes customized voice signals and textual commands through action and entity extraction and divides the execution tasks into canonical interaction subsets in real-time with error prevention from environment feedback. Experiment results in an urban engineering VR environment with synthetic instruction data show that Voice2Action can perform more efficiently and accurately than approaches without optimizations.
Energy-Efficient Cellular-Connected UAV Swarm Control Optimization
Mar 18, 2023
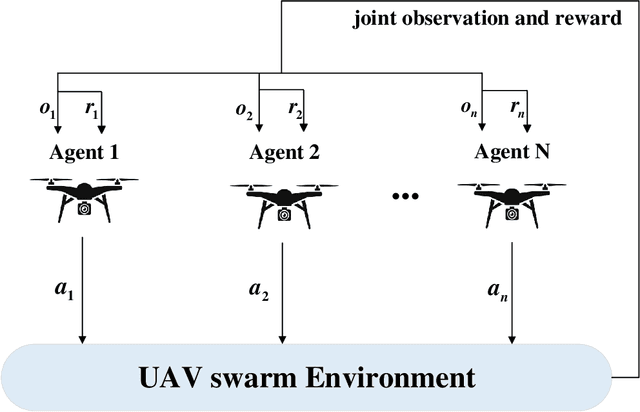
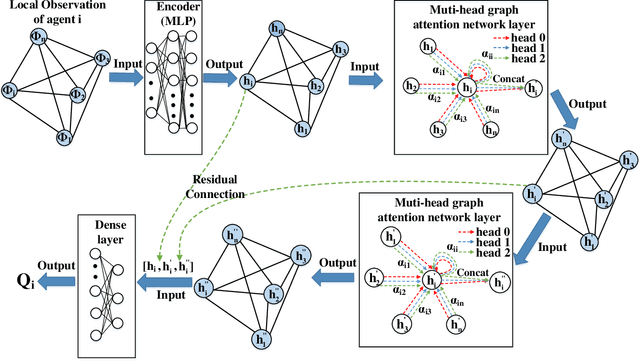
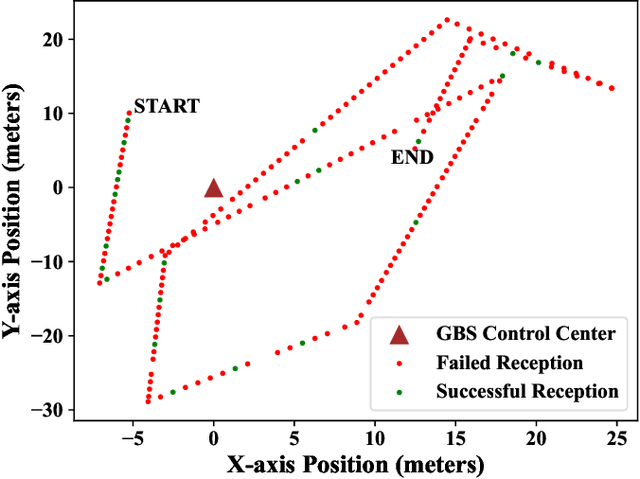
Cellular-connected unmanned aerial vehicle (UAV) swarm is a promising solution for diverse applications, including cargo delivery and traffic control. However, it is still challenging to communicate with and control the UAV swarm with high reliability, low latency, and high energy efficiency. In this paper, we propose a two-phase command and control (C&C) transmission scheme in a cellular-connected UAV swarm network, where the ground base station (GBS) broadcasts the common C&C message in Phase I. In Phase II, the UAVs that have successfully decoded the C&C message will relay the message to the rest of UAVs via device-to-device (D2D) communications in either broadcast or unicast mode, under latency and energy constraints. To maximize the number of UAVs that receive the message successfully within the latency and energy constraints, we formulate the problem as a Constrained Markov Decision Process to find the optimal policy. To address this problem, we propose a decentralized constrained graph attention multi-agent Deep-Q-network (DCGA-MADQN) algorithm based on Lagrangian primal-dual policy optimization, where a PID-controller algorithm is utilized to update the Lagrange Multiplier. Simulation results show that our algorithm could maximize the number of UAVs that successfully receive the common C&C under energy constraints.
Interpretable Battery Cycle Life Range Prediction Using Early Degradation Data at Cell Level
Apr 26, 2022



Battery cycle life prediction using early degradation data has many potential applications throughout the battery product life cycle. Various data-driven methods have been proposed for point prediction of battery cycle life with minimum knowledge of the battery degradation mechanisms. However, management of batteries at end-of-life with lower economic and technical risk requires prediction of cycle life with quantified uncertainty, which is still lacking. The interpretability (i.e., the reason for high prediction accuracy) of these advanced data-driven methods is also worthy of investigation. Here, a physics-informed Quantile Regression Forest (QRF) model is introduced to make cycle life range prediction with uncertainty quantified as the length of the prediction interval, in addition to point predictions with high accuracy. The hyperparameters of the QRF model are tuned with a proposed area-based performance evaluation metric so that the coverage probabilities associated with the prediction intervals are calibrated. The interpretability of the final QRF model is explored with two global model-agnostic methods, namely permutation importance, and partial dependence plot. The final QRF model facilitates dual-criteria decision-making to select the high-cycle-life charging protocol with consideration of both point predictions and uncertainty associated with the prediction.