 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYichao Tang
Switchable Adhesion Actuator for Amphibious Climbing Soft Robot
Feb 05, 2019
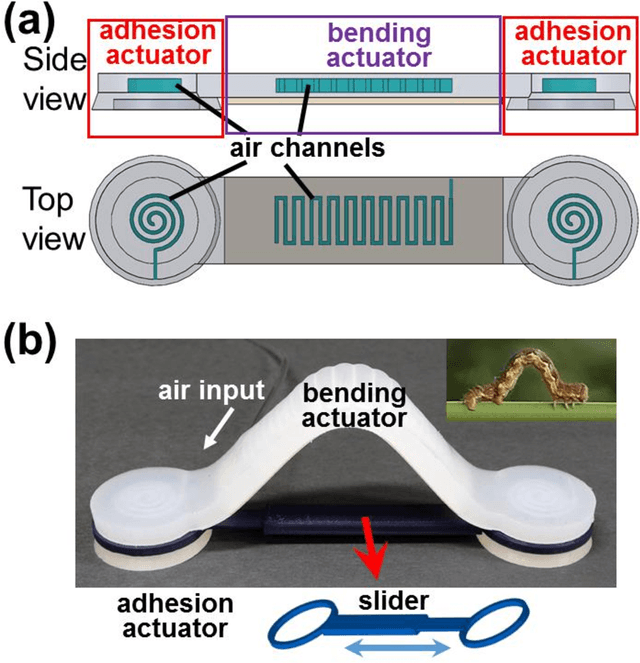
Climbing soft robots are of tremendous interest in both science and engineering due to their potential applications in intelligent surveillance, inspection, maintenance, and detection under environments away from the ground. The challenge lies in the design of a fast, robust, switchable adhesion actuator to easily attach and detach the vertical surfaces. Here, we propose a new design of pneumatic-actuated bioinspired soft adhesion actuator working both on ground and under water. It is composed of extremely soft bilayer structures with an embedded spiral pneumatic channel resting on top of a base layer with a cavity. Rather than the traditional way of directly pumping air out of the cavity for suction in hard polymer-based adhesion actuator, we inflate air into the top spiral channel to deform into a stable 3D domed shape for achieving negative pressure in the cavity. The characterization of the maximum shear adhesion force of the proposed soft adhesion actuator shows strong and rapid reversible adhesion on multiple types of smooth and semi-smooth surfaces. Based on the switchable adhesion actuator, we design and fabricate a novel load-carrying amphibious climbing soft robot (ACSR) by combining with a soft bending actuator. We demonstrate that it can operate on a wide range of foreign horizontal and vertical surfaces including dry, wet, slippery, smooth, and semi-smooth ones on ground and also under water with certain load-carrying capability. We show that the vertical climbing speed can reach about 286 mm/min (1.6 body length/min) while carrying over 200g object (over 5 times the weight of ACSR itself) during climbing on ground and under water. This research could largely push the boundaries of soft robot capabilities and multifunctionality in window cleaning and underwater inspection under harsh environment.
Design of Multifunctional Soft Doming Actuator for Soft Machines
Mar 23, 2018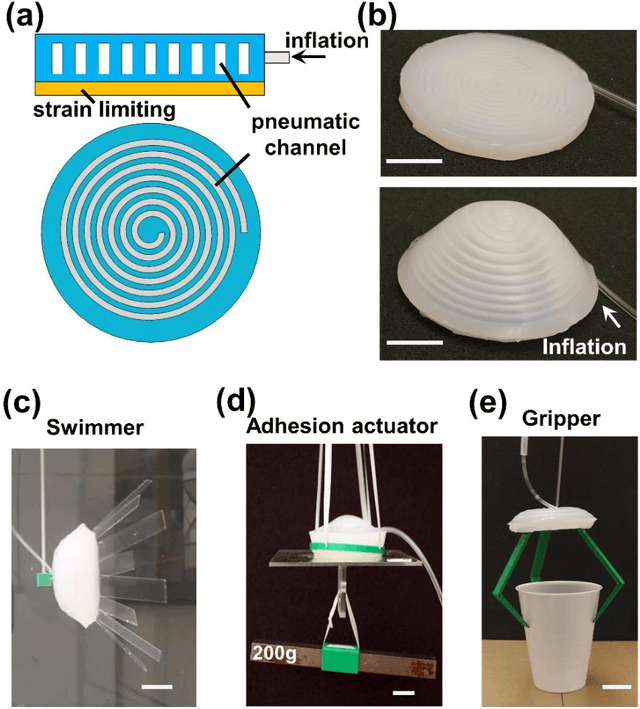
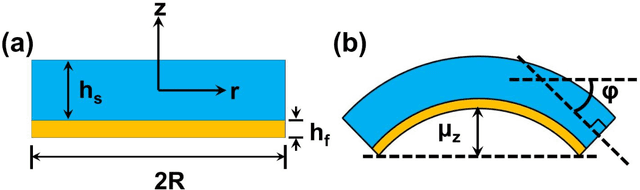
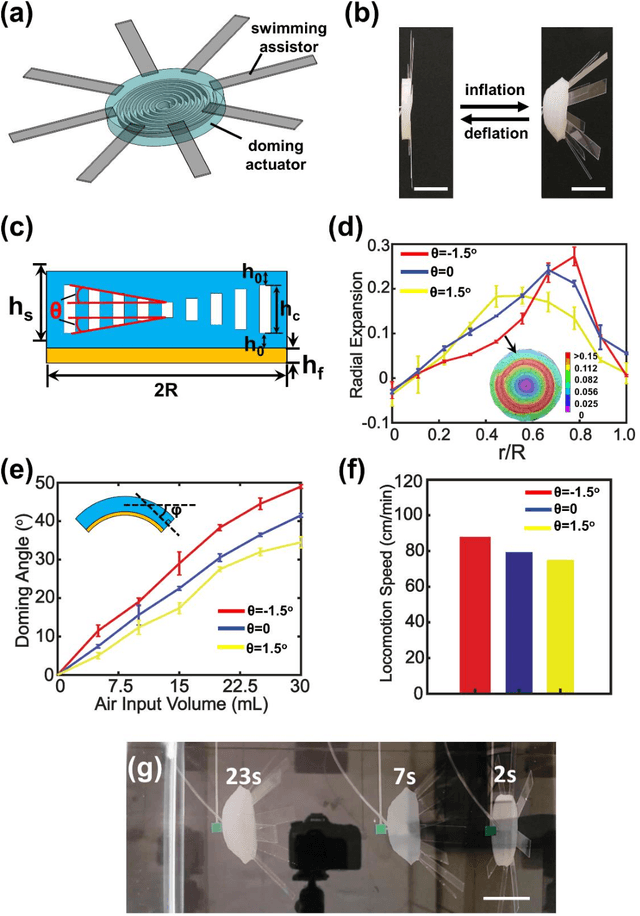
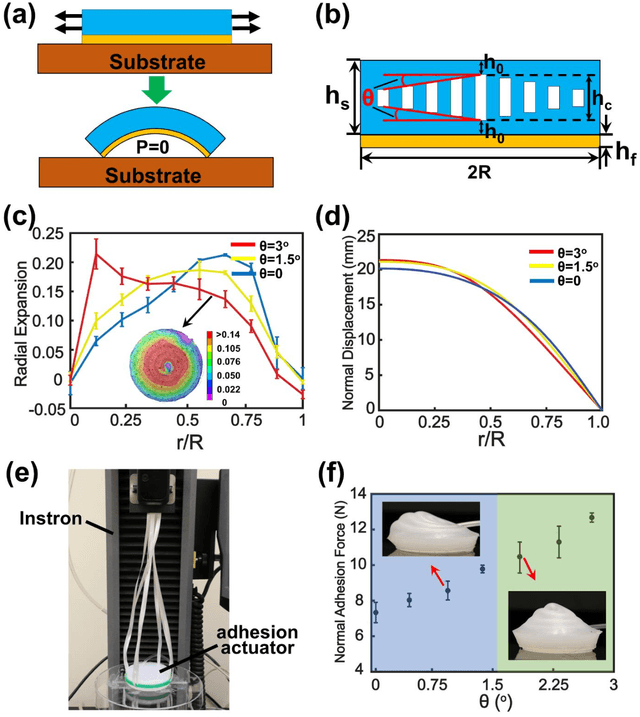
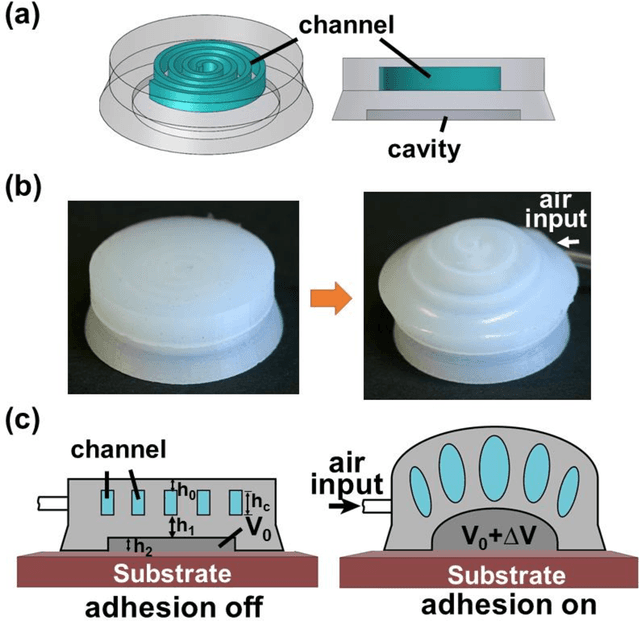
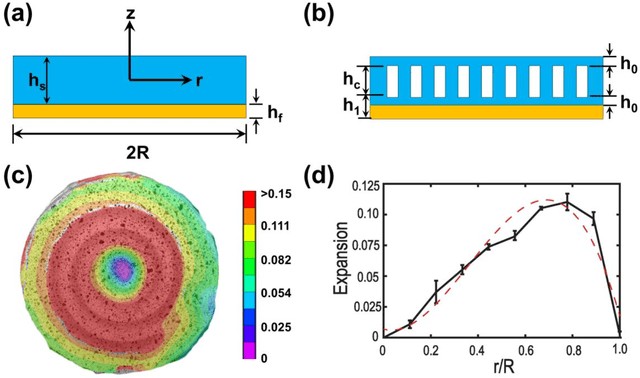
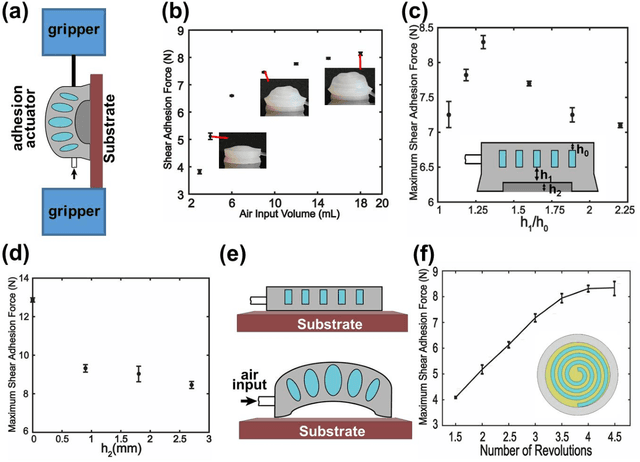
Bilayer bending based soft actuators are widely utilized in soft robotics for locomotion and object gripping. However, studies on soft actuators based on bilayer doming remain largely unexplored despite the often-observed dome-like shapes in undersea animals such as jellyfish and octopus suction cup. Here, based on the simplified model of bending-induced doming of circular bilayer plates with mismatched deformation, we explore the design of soft doming actuator upon pneumatic actuation and its implications in design of multifunctional soft machines. The bilayer actuator is composed of patterned embedded pneumatic channel on top for radial expansion and a solid elastomeric layer on bottom for strain-limiting. We show that both the cavity volume and bending angle at the rim of the actuated dome can be controlled by tuning the height gradient of the pneumatic channel along the radial direction. We demonstrate its potential multifunctional applications in swimming, adhesion, and gripping, including high efficient jellyfish-inspired underwater soft robots with locomotion speed of 84 cm/min and rotation-based soft grippers with low energy cost by harnessing the large rim bending angle, as well as octopus-inspired soft adhesion actuators with strong and switchable adhesion force of over 10 N by utilizing the large cavity volume.