 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYuhu Guo
Spring-IMU Fusion Based Proprioception for Feedback Control of Soft Manipulators
Sep 25, 2023
This paper presents a novel framework to realize proprioception and closed-loop control for soft manipulators. Deformations with large elongation and large bending can be precisely predicted using geometry-based sensor signals obtained from the inductive springs and the inertial measurement units (IMUs) with the help of machine learning techniques. Multiple geometric signals are fused into robust pose estimations, and a data-efficient training process is achieved after applying the strategy of sim-to-real transfer. As a result, we can achieve proprioception that is robust to the variation of external loading and has an average error of 0.7% across the workspace on a pneumatic-driven soft manipulator. The realized proprioception on soft manipulator is then contributed to building a sensor-space based algorithm for closed-loop control. A gradient descent solver is developed to drive the end-effector to achieve the required poses by iteratively computing a sequence of reference sensor signals. A conventional controller is employed in the inner loop of our algorithm to update actuators (i.e., the pressures in chambers) for approaching a reference signal in the sensor-space. The systematic function of closed-loop control has been demonstrated in tasks like path following and pick-and-place under different external loads.
Asynchronous "Events" are Better For Motion Estimation
Apr 24, 2019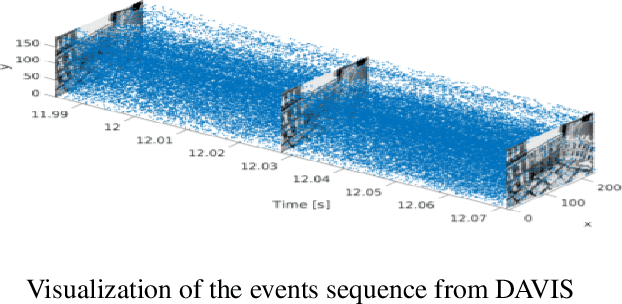
Event-based camera is a bio-inspired vision sensor that records intensity changes (called event) asynchronously in each pixel. As an instance of event-based camera, Dynamic and Active-pixel Vision Sensor (DAVIS) combines a standard camera and an event-based camera. However, traditional models could not deal with the event stream asynchronously. To analyze the event stream asynchronously, most existing approaches accumulate events within a certain time interval and treat the accumulated events as a synchronous frame, which wastes the intensity change information and weakens the advantages of DAVIS. Therefore, in this paper, we present the first neural asynchronous approach to process event stream for event-based camera. Our method asynchronously extracts dynamic information from events by leveraging previous motion and critical features of gray-scale frames. To our best knowledge, this is the first neural asynchronous method to analyze event stream through a novel deep neural network. Extensive experiments demonstrate that our proposed model achieves remarkable improvements against the state-of-the-art baselines.