 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYunxi Tang
Bootstrapping Robotic Skill Learning With Intuitive Teleoperation: Initial Feasibility Study
Nov 11, 2023
Robotic skill learning has been increasingly studied but the demonstration collections are more challenging compared to collecting images/videos in computer vision and texts in natural language processing. This paper presents a skill learning paradigm by using intuitive teleoperation devices to generate high-quality human demonstrations efficiently for robotic skill learning in a data-driven manner. By using a reliable teleoperation interface, the da Vinci Research Kit (dVRK) master, a system called dVRK-Simulator-for-Demonstration (dS4D) is proposed in this paper. Various manipulation tasks show the system's effectiveness and advantages in efficiency compared to other interfaces. Using the collected data for policy learning has been investigated, which verifies the initial feasibility. We believe the proposed paradigm can facilitate robot learning driven by high-quality demonstrations and efficiency while generating them.
Towards Safe Landing of Falling Quadruped Robots Using a 3-DoF Morphable Inertial Tail
Sep 30, 2022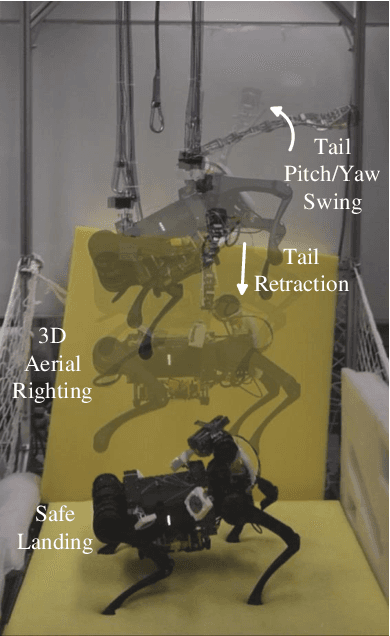
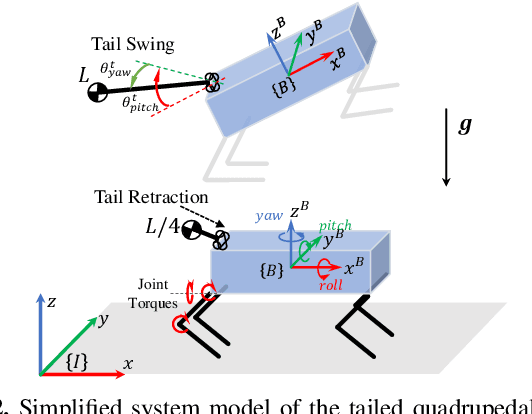
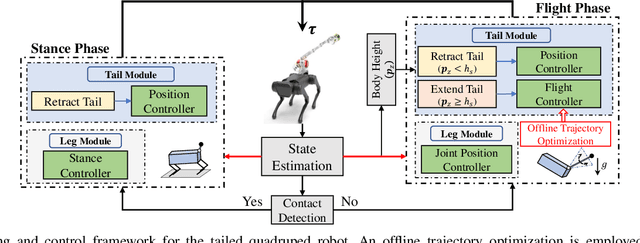
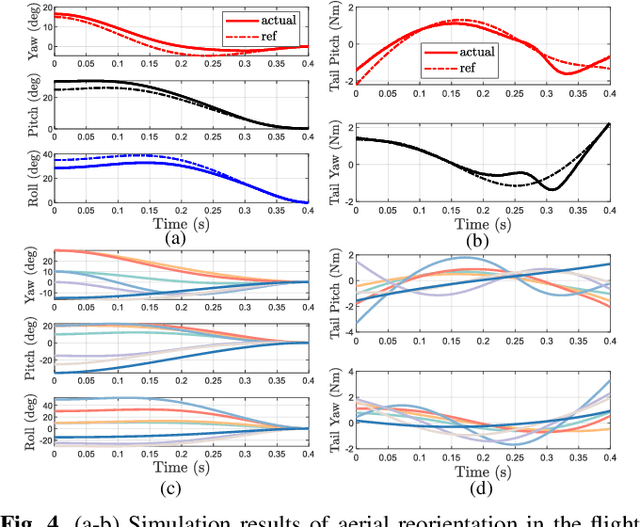
Falling cat problem is well-known where cats show their super aerial reorientation capability and can land safely. For their robotic counterparts, a similar falling quadruped robot problem, has not been fully addressed, although achieving safe landing as the cats has been increasingly investigated. Unlike imposing the burden on landing control, we approach to safe landing of falling quadruped robots by effective flight phase control. Different from existing work like swinging legs and attaching reaction wheels or simple tails, we propose to deploy a 3-DoF morphable inertial tail on a medium-size quadruped robot. In the flight phase, the tail with its maximum length can self-right the body orientation in 3D effectively; before touch-down, the tail length can be retracted to about 1/4 of its maximum for impressing the tail's side-effect on landing. To enable aerial reorientation for safe landing in the quadruped robots, we design a control architecture, which has been verified in a high-fidelity physics simulation environment with different initial conditions. Experimental results on a customized flight-phase test platform with comparable inertial properties are provided and show the tail's effectiveness on 3D body reorientation and its fast retractability before touch-down. An initial falling quadruped robot experiment is shown, where the robot Unitree A1 with the 3-DoF tail can land safely subject to non-negligible initial body angles.
HM-DDP: A Hybrid Multiple-shooting Differential Dynamic Programming Method for Constrained Trajectory Optimization
Sep 15, 2021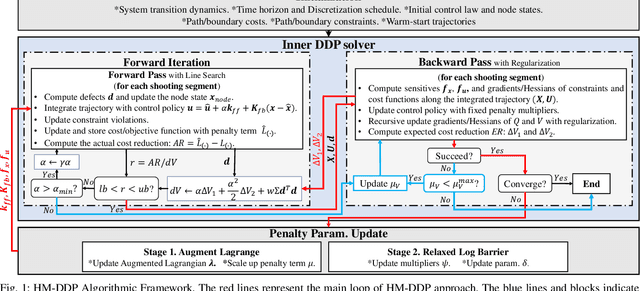
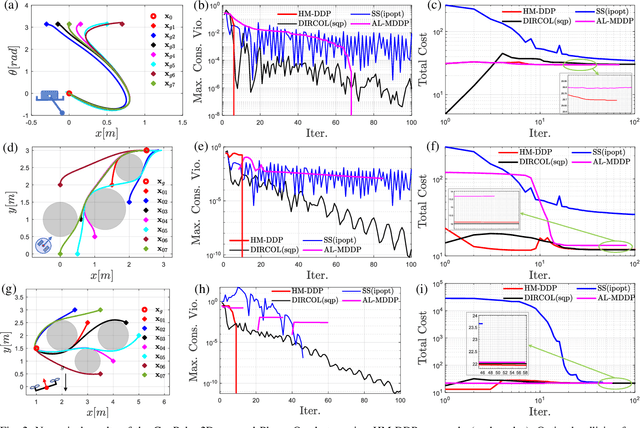
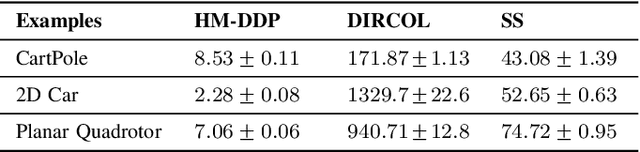
Trajectory optimization has been used extensively in robotic systems. In particular, Differential Dynamic Programming (DDP) has performed well as an off-line planner or an online nonlinear model predictive control solver, with a lower computational cost compared with other general-purpose nonlinear programming solvers. However, standard DDP cannot handle any constraints or perform reasonable initialization of a state trajectory. In this paper, we propose a hybrid constrained DDP variant with a multiple-shooting framework. The main technical contributions are twofold: 1) In addition to inheriting the simplicity of the initialization in multiple shooting, a two-stage framework is developed to deal with state and control inequality constraints robustly without loss of the linear feedback term of DDP. Such a hybrid strategy offers a fast convergence of constraint satisfaction. 2) An improved globalization strategy is proposed to exploit the coupled effects between line-searching and regularization, which is able to enhance the numerical robustness of DDP-like approaches. Our approach is tested on three constrained trajectory optimization problems with nonlinear inequality constraints and outperforms the commonly-used collocation and shooting methods in terms of runtime and constraint satisfaction.