 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYuyao Sun
Active Admittance Control with Iterative Learning for General-Purpose Contact-Rich Manipulation
Mar 25, 2024
Force interaction is inevitable when robots face multiple operation scenarios. How to make the robot competent in force control for generalized operations such as multi-tasks still remains a challenging problem. Aiming at the reproducibility of interaction tasks and the lack of a generalized force control framework for multi-task scenarios, this paper proposes a novel hybrid control framework based on active admittance control with iterative learning parameters-tunning mechanism. The method adopts admittance control as the underlying algorithm to ensure flexibility, and iterative learning as the high-level algorithm to regulate the parameters of the admittance model. The whole algorithm has flexibility and learning ability, which is capable of achieving the goal of excellent versatility. Four representative interactive robot manipulation tasks are chosen to investigate the consistency and generalisability of the proposed method. Experiments are designed to verify the effectiveness of the whole framework, and an average of 98.21% and 91.52% improvement of RMSE is obtained relative to the traditional admittance control as well as the model-free adaptive control, respectively.
A Lightweight Deep Network for Efficient CSI Feedback in Massive MIMO Systems
May 21, 2021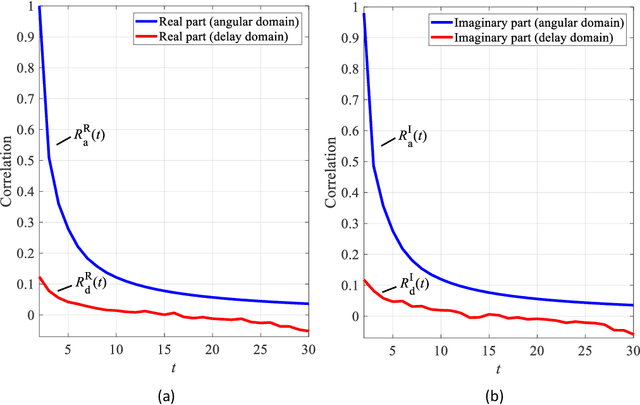
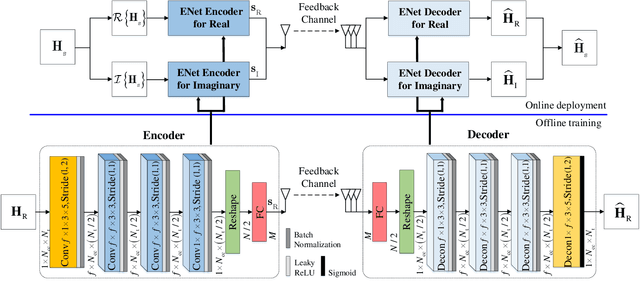
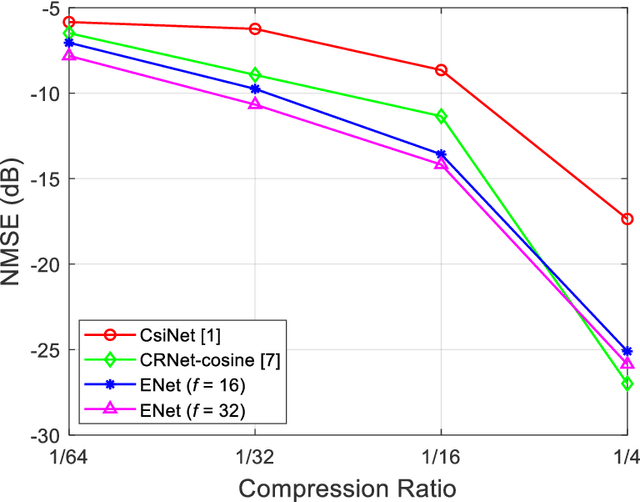
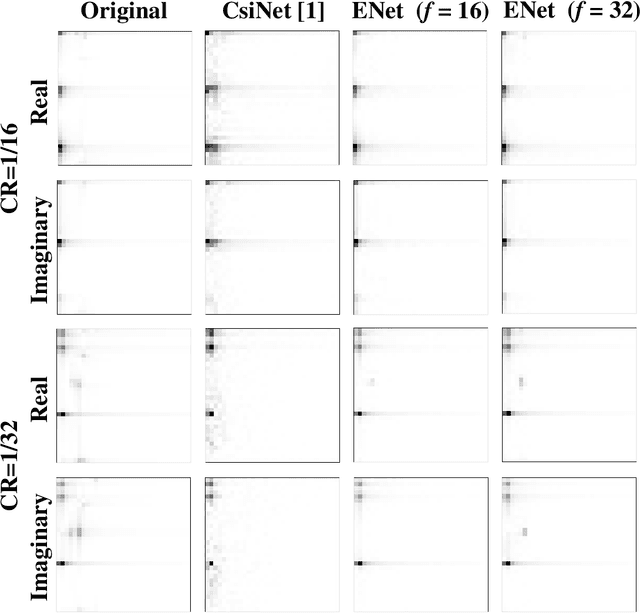
To fully exploit the advantages of massive multiple-input multiple-output (m-MIMO), accurate channel state information (CSI) is required at the transmitter. However, excessive CSI feedback for large antenna arrays is inefficient and thus undesirable in practical applications. By exploiting the inherent correlation characteristics of complex-valued channel responses in the angular-delay domain, we propose a novel neural network (NN) architecture, namely ENet, for CSI compression and feedback in m-MIMO. Even if the ENet processes the real and imaginary parts of the CSI values separately, its special structure enables the network trained for the real part only to be reused for the imaginary part. The proposed ENet shows enhanced performance with the network size reduced by nearly an order of magnitude compared to the existing NN-based solutions. Experimental results verify the effectiveness of the proposed ENet.