 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZeqing Fu
Graph-based Inpainting for 3D Dynamic Point Clouds
Apr 23, 2019
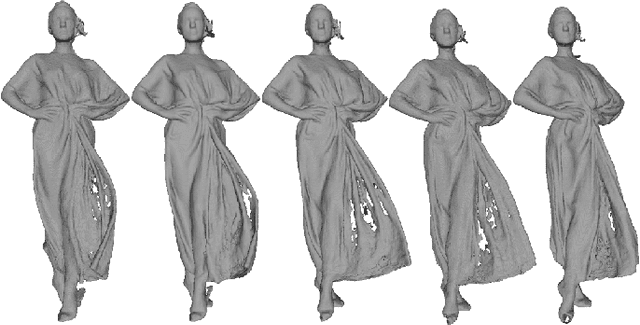

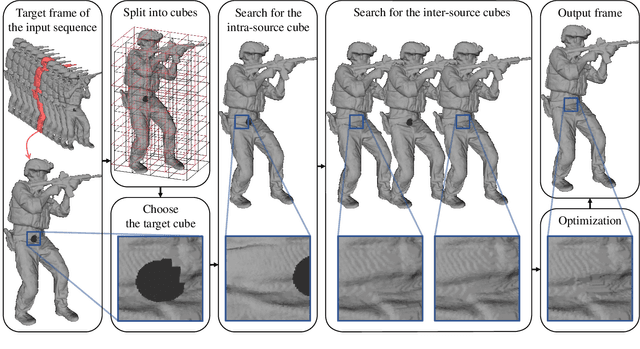
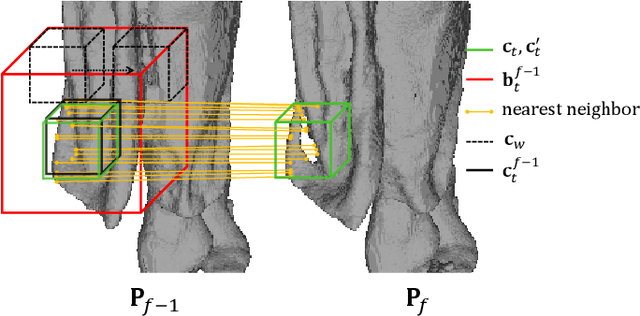
With the development of depth sensors and 3D laser scanning techniques, 3D dynamic point clouds have attracted increasing attention as a format for the representation of 3D objects in motion, with applications in various fields such as 3D immersive tele-presence, navigation, animation, gaming and virtual reality. However, dynamic point clouds usually exhibit holes of missing data, mainly due to the fast motion, the limitation of acquisition techniques and complicated structure. Further, point clouds are defined on irregular non-Euclidean domain, which is challenging to address with conventional methods for regular data. Hence, leveraging on graph signal processing tools, we propose an efficient dynamic point cloud inpainting method, exploiting both the inter-frame coherence and the intra-frame self-similarity in 3D dynamic point clouds. Specifically, for each frame in a point cloud sequence, we first split it into cubes of fixed size as the processing unit, and treat cubes with holes inside as target cubes. Secondly, we take advantage of the intra-frame self-similarity in the target frame, by globally searching for the most similar cube to each target cube as the intra-source cube. Thirdly, we exploit the inter-frame coherence among every three consecutive frames, by searching the corresponding cubes in the previous and subsequent frames for each target cube as the inter-source cubes, which contains most nearest neighbors of the target cube in the relative location. Finally, we formulate dynamic point cloud inpainting as an optimization problem based on both intra- and inter-source cubes, which is regularized by the graph-signal smoothness prior. Experimental results show that the proposed approach outperforms three competing methods significantly, both in objective and subjective quality.
Local Frequency Interpretation and Non-Local Self-Similarity on Graph for Point Cloud Inpainting
Sep 28, 2018



As 3D scanning devices and depth sensors mature, point clouds have attracted increasing attention as a format for 3D object representation, with applications in various fields such as tele-presence, navigation and heritage reconstruction. However, point clouds usually exhibit holes of missing data, mainly due to the limitation of acquisition techniques and complicated structure. Further, point clouds are defined on irregular non-Euclidean domains, which is challenging to address especially with conventional signal processing tools. Hence, leveraging on recent advances in graph signal processing, we propose an efficient point cloud inpainting method, exploiting both the local smoothness and the non-local self-similarity in point clouds. Specifically, we first propose a frequency interpretation in graph nodal domain, based on which we introduce the local graph-signal smoothness prior in order to describe the local smoothness of point clouds. Secondly, we explore the characteristics of non-local self-similarity, by globally searching for the most similar area to the missing region. The similarity metric between two areas is defined based on the direct component and the anisotropic graph total variation of normals in each area. Finally, we formulate the hole-filling step as an optimization problem based on the selected most similar area and regularized by the graph-signal smoothness prior. Besides, we propose voxelization and automatic hole detection methods for the point cloud prior to inpainting. Experimental results show that the proposed approach outperforms four competing methods significantly, both in objective and subjective quality.