 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZhaiyu Chen
PolyGNN: Polyhedron-based Graph Neural Network for 3D Building Reconstruction from Point Clouds
Jul 17, 2023
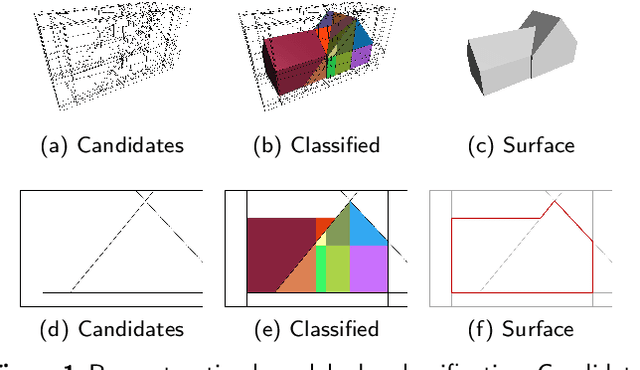
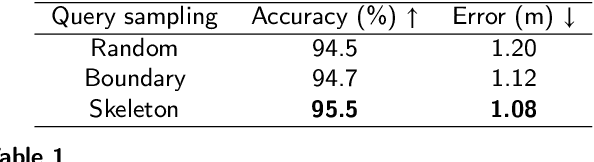
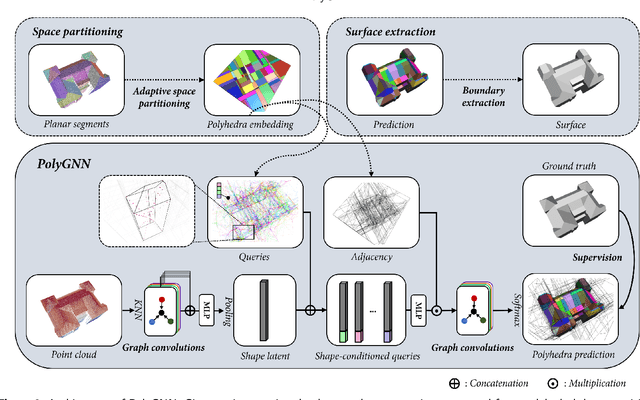
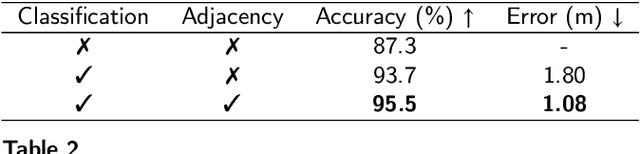
We present PolyGNN, a polyhedron-based graph neural network for 3D building reconstruction from point clouds. PolyGNN learns to assemble primitives obtained by polyhedral decomposition via graph node classification, achieving a watertight, compact, and weakly semantic reconstruction. To effectively represent arbitrary-shaped polyhedra in the neural network, we propose three different sampling strategies to select representative points as polyhedron-wise queries, enabling efficient occupancy inference. Furthermore, we incorporate the inter-polyhedron adjacency to enhance the classification of the graph nodes. We also observe that existing city-building models are abstractions of the underlying instances. To address this abstraction gap and provide a fair evaluation of the proposed method, we develop our method on a large-scale synthetic dataset covering 500k+ buildings with well-defined ground truths of polyhedral class labels. We further conduct a transferability analysis across cities and on real-world point clouds. Both qualitative and quantitative results demonstrate the effectiveness of our method, particularly its efficiency for large-scale reconstructions. The source code and data of our work are available at https://github.com/chenzhaiyu/polygnn.
Reconstructing Compact Building Models from Point Clouds Using Deep Implicit Fields
Jan 09, 2022



Three-dimensional (3D) building models play an increasingly pivotal role in many real-world applications while obtaining a compact representation of buildings remains an open problem. In this paper, we present a novel framework for reconstructing compact, watertight, polygonal building models from point clouds. Our framework comprises three components: (a) a cell complex is generated via adaptive space partitioning that provides a polyhedral embedding as the candidate set; (b) an implicit field is learned by a deep neural network that facilitates building occupancy estimation; (c) a Markov random field is formulated to extract the outer surface of a building via combinatorial optimization. We evaluate and compare our method with state-of-the-art methods in shape reconstruction, surface approximation, and geometry simplification. Experiments on both synthetic and real-world point clouds have demonstrated that, with our neural-guided strategy, high-quality building models can be obtained with significant advantages in fidelity, compactness, and computational efficiency. Our method shows robustness to noise and insufficient measurements, and it can directly generalize from synthetic scans to real-world measurements. The source code of this work is freely available at https://github.com/chenzhaiyu/points2poly.