 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZhaobin Mo
Physics-Informed Deep Learning For Traffic State Estimation: A Survey and the Outlook
Mar 03, 2023



For its robust predictive power (compared to pure physics-based models) and sample-efficient training (compared to pure deep learning models), physics-informed deep learning (PIDL), a paradigm hybridizing physics-based models and deep neural networks (DNN), has been booming in science and engineering fields. One key challenge of applying PIDL to various domains and problems lies in the design of a computational graph that integrates physics and DNNs. In other words, how physics are encoded into DNNs and how the physics and data components are represented. In this paper, we provide a variety of architecture designs of PIDL computational graphs and how these structures are customized to traffic state estimation (TSE), a central problem in transportation engineering. When observation data, problem type, and goal vary, we demonstrate potential architectures of PIDL computational graphs and compare these variants using the same real-world dataset.
Quantifying Uncertainty In Traffic State Estimation Using Generative Adversarial Networks
Jun 19, 2022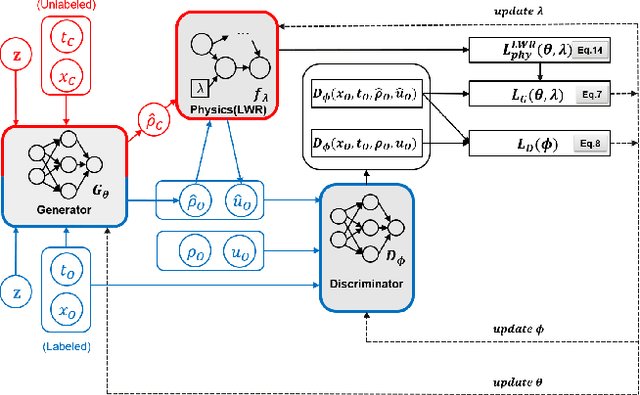
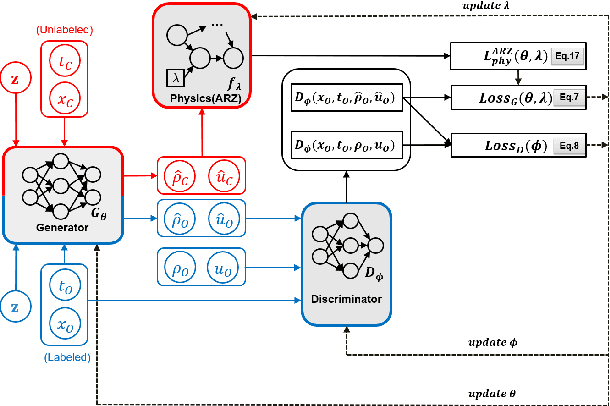
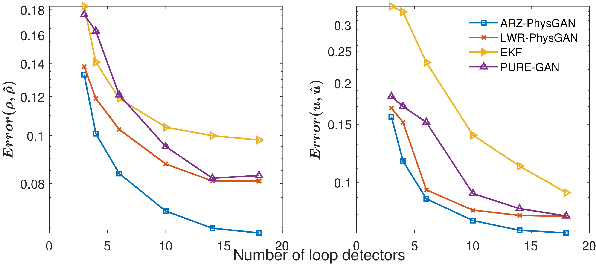

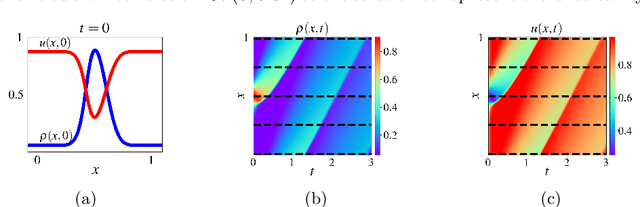
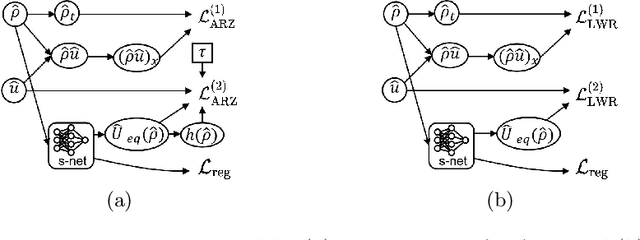
This paper aims to quantify uncertainty in traffic state estimation (TSE) using the generative adversarial network based physics-informed deep learning (PIDL). The uncertainty of the focus arises from fundamental diagrams, in other words, the mapping from traffic density to velocity. To quantify uncertainty for the TSE problem is to characterize the robustness of predicted traffic states. Since its inception, generative adversarial networks (GAN) have become a popular probabilistic machine learning framework. In this paper, we will inform the GAN based predictions using stochastic traffic flow models and develop a GAN based PIDL framework for TSE, named ``PhysGAN-TSE". By conducting experiments on a real-world dataset, the Next Generation SIMulation (NGSIM) dataset, this method is shown to be more robust for uncertainty quantification than the pure GAN model or pure traffic flow models. Two physics models, the Lighthill-Whitham-Richards (LWR) and the Aw-Rascle-Zhang (ARZ) models, are compared as the physics components for the PhysGAN, and results show that the ARZ-based PhysGAN achieves a better performance than the LWR-based one.
TrafficFlowGAN: Physics-informed Flow based Generative Adversarial Network for Uncertainty Quantification
Jun 19, 2022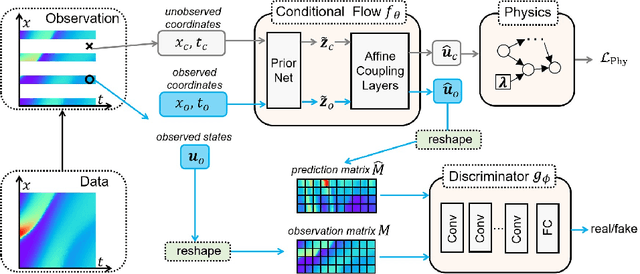

This paper proposes the TrafficFlowGAN, a physics-informed flow based generative adversarial network (GAN), for uncertainty quantification (UQ) of dynamical systems. TrafficFlowGAN adopts a normalizing flow model as the generator to explicitly estimate the data likelihood. This flow model is trained to maximize the data likelihood and to generate synthetic data that can fool a convolutional discriminator. We further regularize this training process using prior physics information, so-called physics-informed deep learning (PIDL). To the best of our knowledge, we are the first to propose an integration of flow, GAN and PIDL for the UQ problems. We take the traffic state estimation (TSE), which aims to estimate the traffic variables (e.g. traffic density and velocity) using partially observed data, as an example to demonstrate the performance of our proposed model. We conduct numerical experiments where the proposed model is applied to learn the solutions of stochastic differential equations. The results demonstrate the robustness and accuracy of the proposed model, together with the ability to learn a machine learning surrogate model. We also test it on a real-world dataset, the Next Generation SIMulation (NGSIM), to show that the proposed TrafficFlowGAN can outperform the baselines, including the pure flow model, the physics-informed flow model, and the flow based GAN model.
A Physics-Informed Deep Learning Paradigm for Traffic State Estimation and Fundamental Diagram Discovery
Jun 09, 2021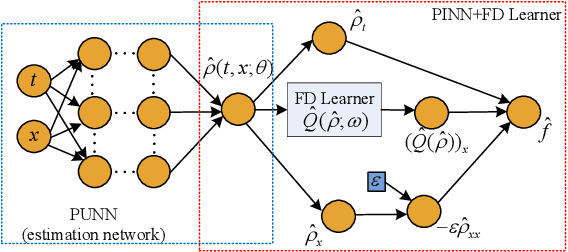
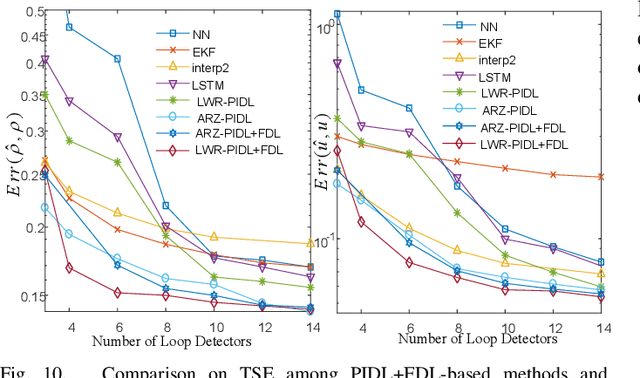
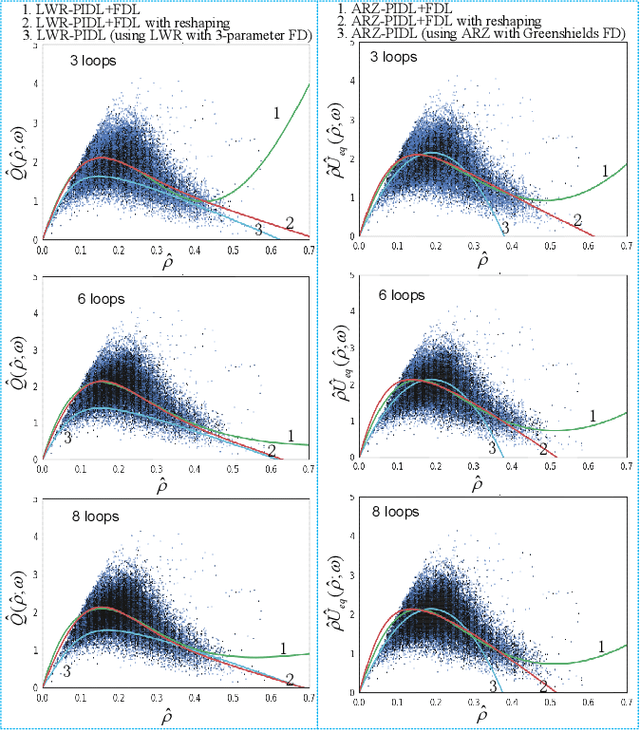
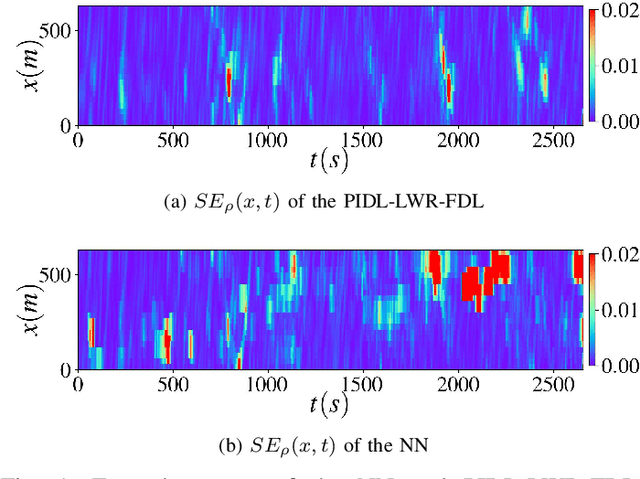
Traffic state estimation (TSE) bifurcates into two main categories, model-driven and data-driven (e.g., machine learning, ML) approaches, while each suffers from either deficient physics or small data. To mitigate these limitations, recent studies introduced hybrid methods, such as physics-informed deep learning (PIDL), which contains both model-driven and data-driven components. This paper contributes an improved paradigm, called physics-informed deep learning with a fundamental diagram learner (PIDL+FDL), which integrates ML terms into the model-driven component to learn a functional form of a fundamental diagram (FD), i.e., a mapping from traffic density to flow or velocity. The proposed PIDL+FDL has the advantages of performing the TSE learning, model parameter discovery, and FD discovery simultaneously. This paper focuses on highway TSE with observed data from loop detectors, using traffic density or velocity as traffic variables. We demonstrate the use of PIDL+FDL to solve popular first-order and second-order traffic flow models and reconstruct the FD relation as well as model parameters that are outside the FD term. We then evaluate the PIDL+FDL-based TSE using the Next Generation SIMulation (NGSIM) dataset. The experimental results show the superiority of the PIDL+FDL in terms of improved estimation accuracy and data efficiency over advanced baseline TSE methods, and additionally, the capacity to properly learn the unknown underlying FD relation.
Physics-Informed Deep Learning for Traffic State Estimation
Jan 17, 2021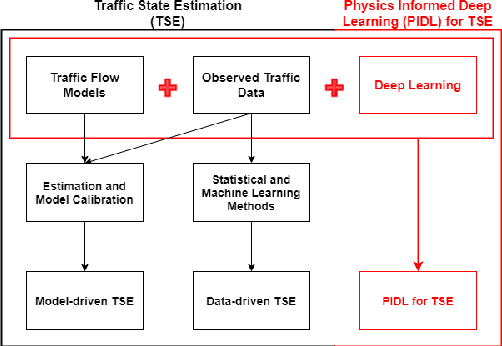
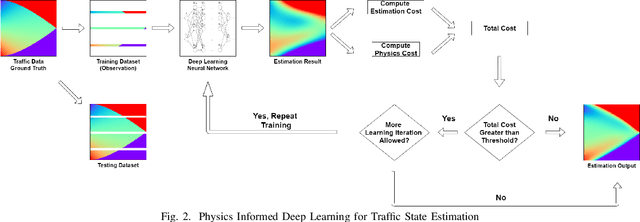
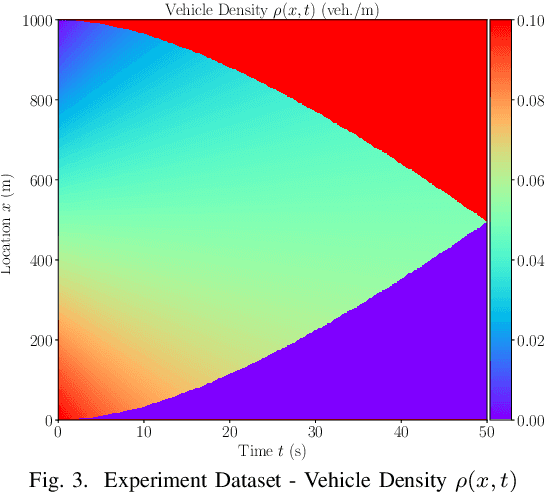
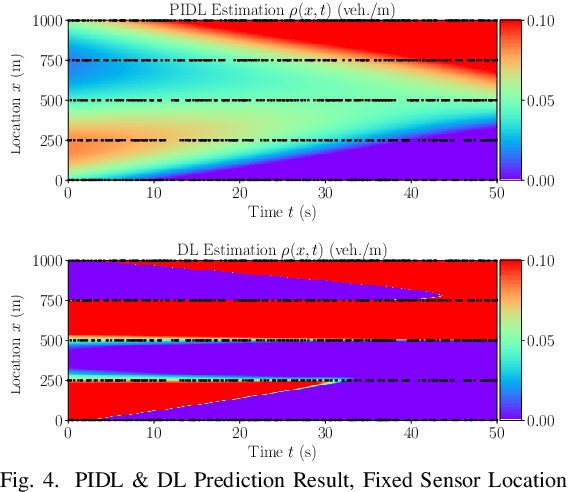
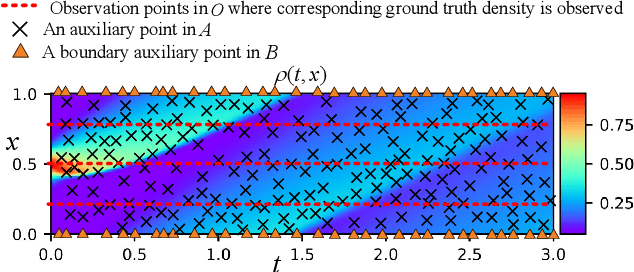
Traffic state estimation (TSE), which reconstructs the traffic variables (e.g., density) on road segments using partially observed data, plays an important role on efficient traffic control and operation that intelligent transportation systems (ITS) need to provide to people. Over decades, TSE approaches bifurcate into two main categories, model-driven approaches and data-driven approaches. However, each of them has limitations: the former highly relies on existing physical traffic flow models, such as Lighthill-Whitham-Richards (LWR) models, which may only capture limited dynamics of real-world traffic, resulting in low-quality estimation, while the latter requires massive data in order to perform accurate and generalizable estimation. To mitigate the limitations, this paper introduces a physics-informed deep learning (PIDL) framework to efficiently conduct high-quality TSE with small amounts of observed data. PIDL contains both model-driven and data-driven components, making possible the integration of the strong points of both approaches while overcoming the shortcomings of either. This paper focuses on highway TSE with observed data from loop detectors, using traffic density as the traffic variables. We demonstrate the use of PIDL to solve (with data from loop detectors) two popular physical traffic flow models, i.e., Greenshields-based LWR and three-parameter-based LWR, and discover the model parameters. We then evaluate the PIDL-based highway TSE using the Next Generation SIMulation (NGSIM) dataset. The experimental results show the advantages of the PIDL-based approach in terms of estimation accuracy and data efficiency over advanced baseline TSE methods.
A Physics-Informed Deep Learning Paradigm for Car-Following Models
Dec 25, 2020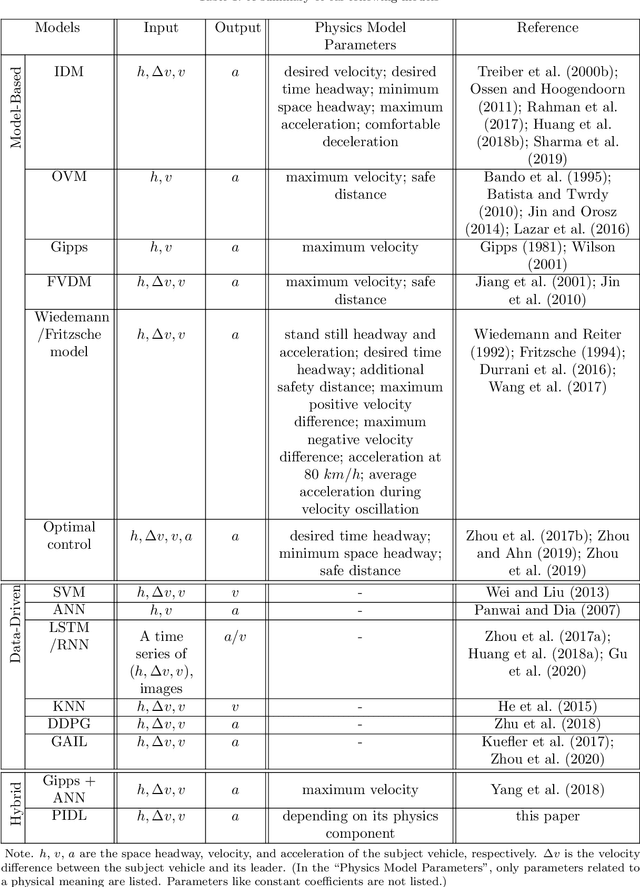
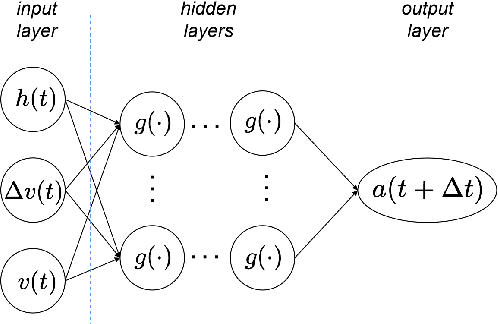

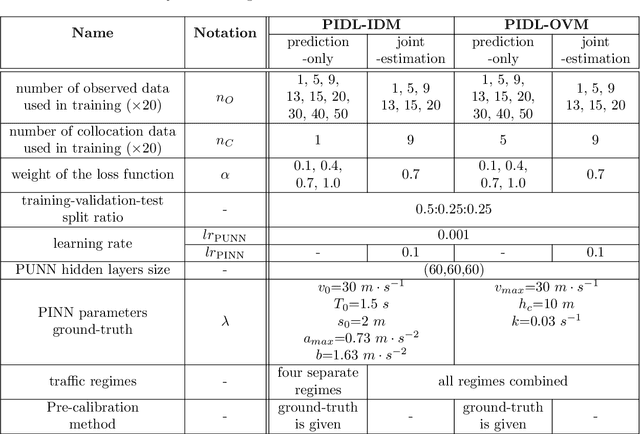
Car-following behavior has been extensively studied using physics-based models, such as the Intelligent Driver Model. These models successfully interpret traffic phenomena observed in the real-world but may not fully capture the complex cognitive process of driving. Deep learning models, on the other hand, have demonstrated their power in capturing observed traffic phenomena but require a large amount of driving data to train. This paper aims to develop a family of neural network based car-following models that are informed by physics-based models, which leverage the advantage of both physics-based (being data-efficient and interpretable) and deep learning based (being generalizable) models. We design physics-informed deep learning for car-following (PIDL-CF) architectures encoded with two popular physics-based models - IDM and OVM, on which acceleration is predicted for four traffic regimes: acceleration, deceleration, cruising, and emergency braking. Two types of PIDL-CFM problems are studied, one to predict acceleration only and the other to jointly predict acceleration and discover model parameters. We also demonstrate the superior performance of PIDL with the Next Generation SIMulation (NGSIM) dataset over baselines, especially when the training data is sparse. The results demonstrate the superior performance of neural networks informed by physics over those without. The developed PIDL-CF framework holds the potential for system identification of driving models and for the development of driving-based controls for automated vehicles.
When Do Drivers Concentrate? Attention-based Driver Behavior Modeling With Deep Reinforcement Learning
Feb 26, 2020



Driver distraction a significant risk to driving safety. Apart from spatial domain, research on temporal inattention is also necessary. In this paper, we propose an actor-critic method - Attention-based Twin Delayed Deep Deterministic policy gradient (ATD3) algorithm to approximate a driver's action according to observations and measure the driver's attention allocation for consecutive time steps in car-following model. Considering reaction time, we construct the attention mechanism in the actor network to capture temporal dependencies of consecutive observations. In the critic network, we employ Twin Delayed Deep Deterministic policy gradient algorithm (TD3) to address overestimated value estimates persisting in the actor-critic algorithm. We conduct experiments on real-world vehicle trajectory datasets and show that the accuracy of our proposed approach outperforms seven baseline algorithms. Moreover, the results reveal that the attention of the drivers in smooth vehicles is uniformly distributed in previous observations while they keep their attention to recent observations when sudden decreases of relative speeds occur. This study is the first contribution to drivers' temporal attention.
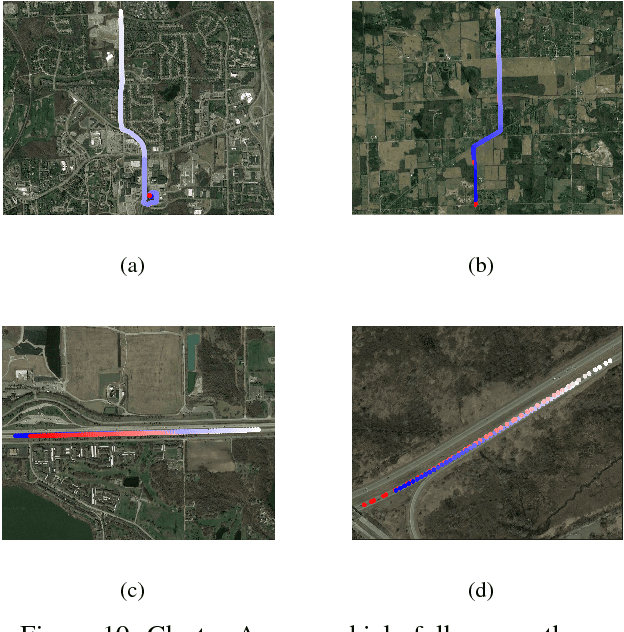
Cluster Naturalistic Driving Encounters Using Deep Unsupervised Learning
Jun 06, 2018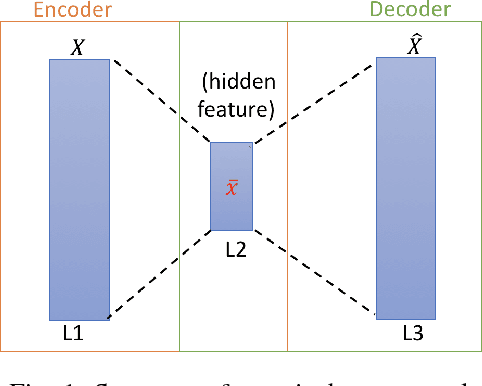
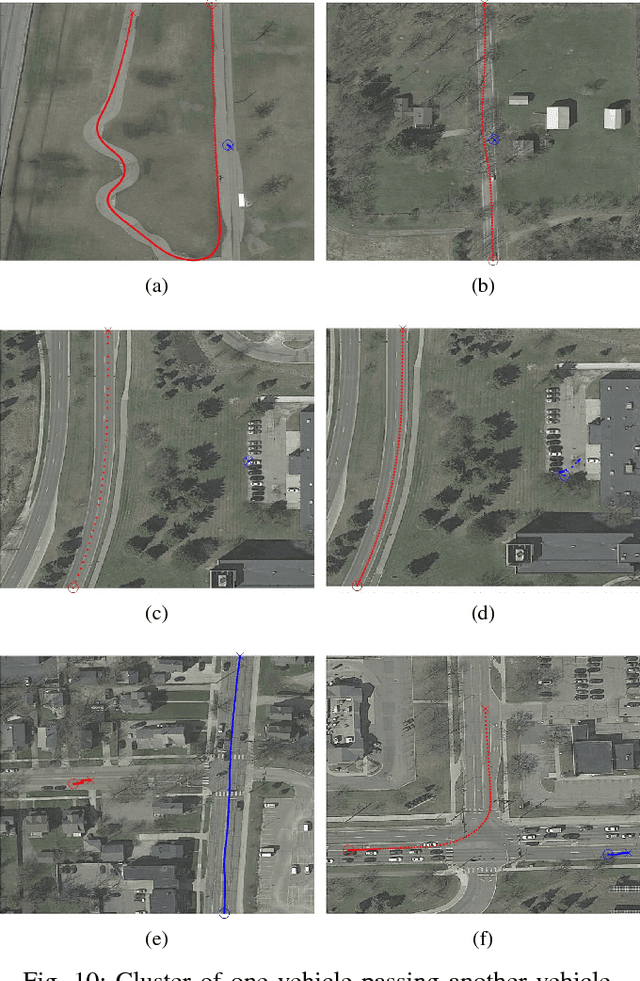
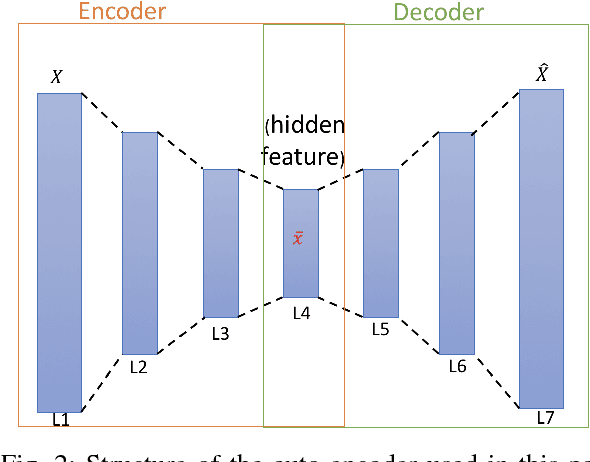
Learning knowledge from driving encounters could help self-driving cars make appropriate decisions when driving in complex settings with nearby vehicles engaged. This paper develops an unsupervised classifier to group naturalistic driving encounters into distinguishable clusters by combining an auto-encoder with k-means clustering (AE-kMC). The effectiveness of AE-kMC was validated using the data of 10,000 naturalistic driving encounters which were collected by the University of Michigan, Ann Arbor in the past five years. We compare our developed method with the $k$-means clustering methods and experimental results demonstrate that the AE-kMC method outperforms the original k-means clustering method.
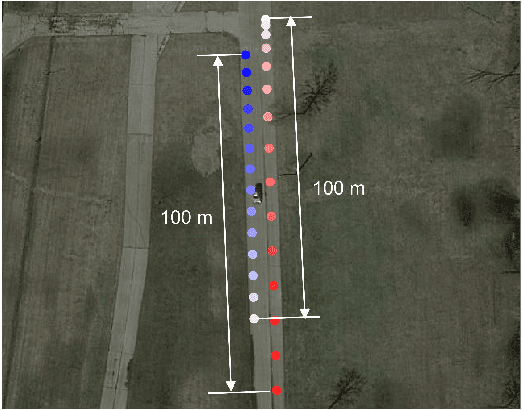
Extraction of V2V Encountering Scenarios from Naturalistic Driving Database
May 23, 2018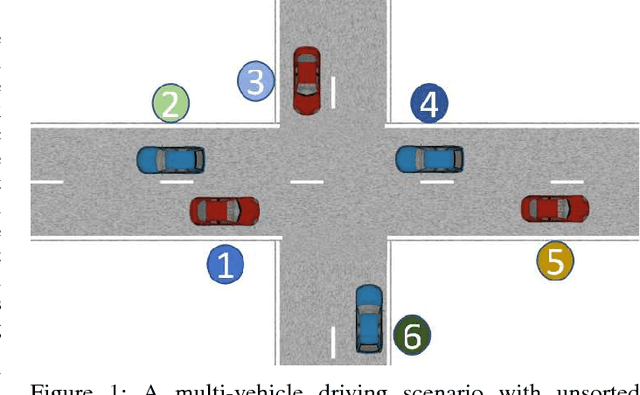
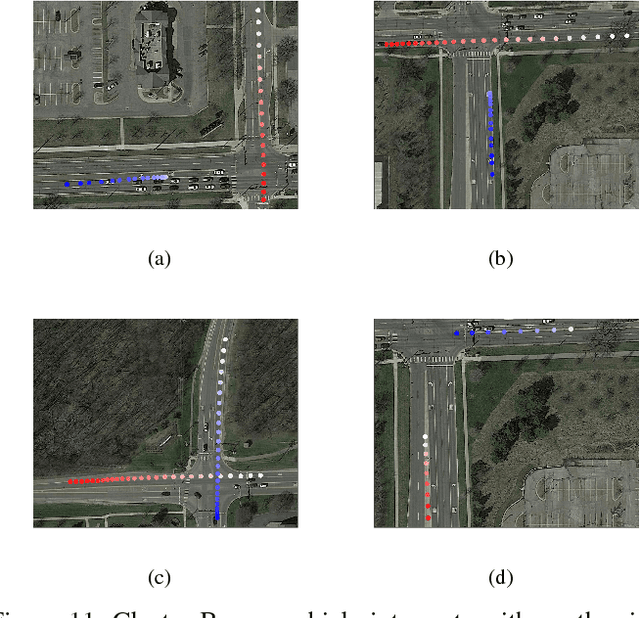
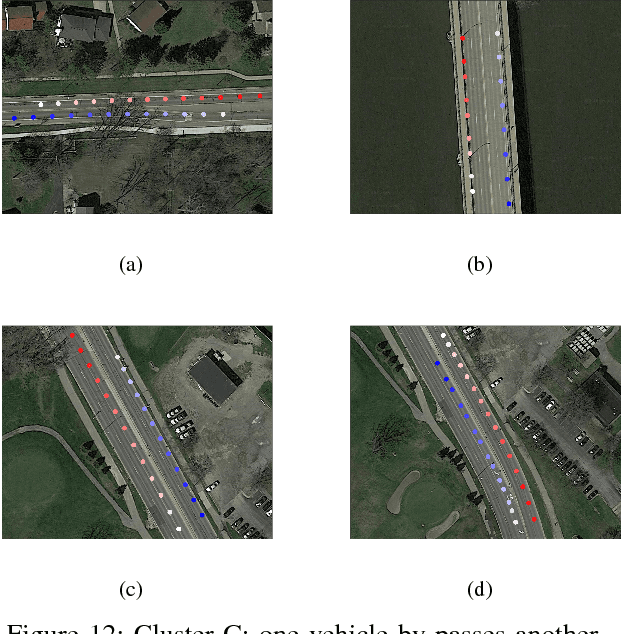
It is necessary to thoroughly evaluate the effectiveness and safety of Connected Vehicles (CVs) algorithm before their release and deployment. Current evaluation approach mainly relies on simulation platform with the single-vehicle driving model. The main drawback of it is the lack of network realism. To overcome this problem, we extract naturalistic V2V encounters data from the database, and then separate the primary vehicle encounter category by clustering. A fast mining algorithm is proposed that can be applied to parallel query for further process acceleration. 4,500 encounters are mined from a 275 GB database collected in the Safety Pilot Model Program in Ann Arbor Michigan, USA. K-means and Dynamic Time Warping (DTW) are used in clustering. Results show this method can quickly mine and cluster primary driving scenarios from a large database. Our results separate the car-following, intersection and by-passing, which are the primary category of the vehicle encounter. We anticipate the work in the essay can become a general method to effectively extract vehicle encounters from any existing database that contains vehicular GPS information. What's more, the naturalistic data of different vehicle encounters can be applied in Connected Vehicles evaluation.