 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZhongyu Yang
LDTR: Transformer-based Lane Detection with Anchor-chain Representation
Mar 21, 2024
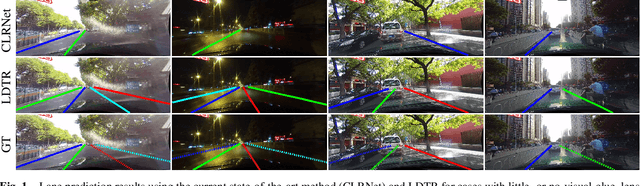
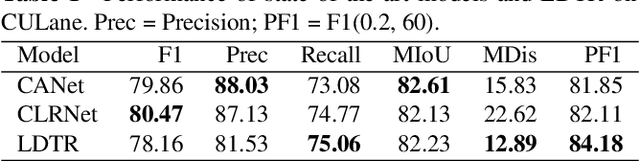
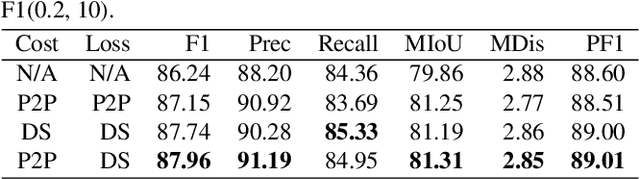
Despite recent advances in lane detection methods, scenarios with limited- or no-visual-clue of lanes due to factors such as lighting conditions and occlusion remain challenging and crucial for automated driving. Moreover, current lane representations require complex post-processing and struggle with specific instances. Inspired by the DETR architecture, we propose LDTR, a transformer-based model to address these issues. Lanes are modeled with a novel anchor-chain, regarding a lane as a whole from the beginning, which enables LDTR to handle special lanes inherently. To enhance lane instance perception, LDTR incorporates a novel multi-referenced deformable attention module to distribute attention around the object. Additionally, LDTR incorporates two line IoU algorithms to improve convergence efficiency and employs a Gaussian heatmap auxiliary branch to enhance model representation capability during training. To evaluate lane detection models, we rely on Frechet distance, parameterized F1-score, and additional synthetic metrics. Experimental results demonstrate that LDTR achieves state-of-the-art performance on well-known datasets.
CANet: Curved Guide Line Network with Adaptive Decoder for Lane Detection
Apr 23, 2023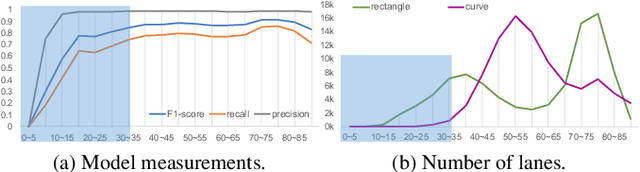
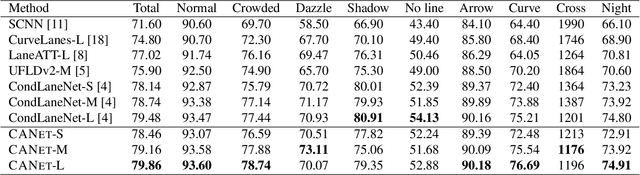
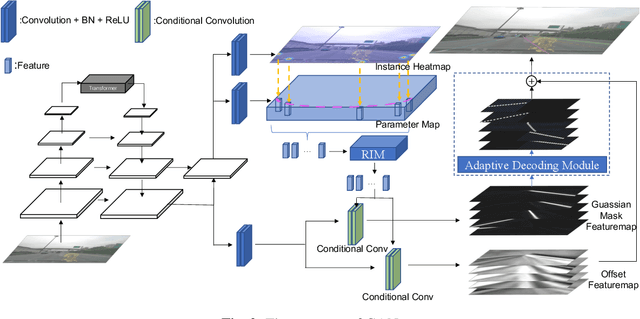
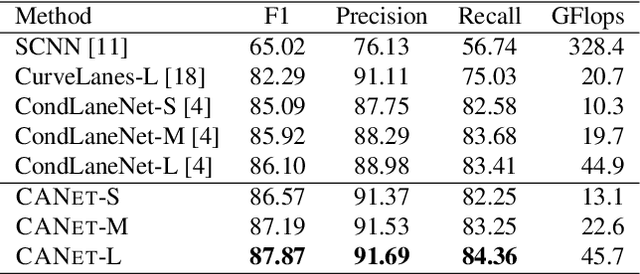
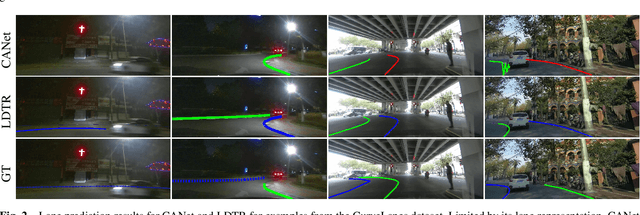
Lane detection is challenging due to the complicated on road scenarios and line deformation from different camera perspectives. Lots of solutions were proposed, but can not deal with corner lanes well. To address this problem, this paper proposes a new top-down deep learning lane detection approach, CANET. A lane instance is first responded by the heat-map on the U-shaped curved guide line at global semantic level, thus the corresponding features of each lane are aggregated at the response point. Then CANET obtains the heat-map response of the entire lane through conditional convolution, and finally decodes the point set to describe lanes via adaptive decoder. The experimental results show that CANET reaches SOTA in different metrics. Our code will be released soon.