 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZhuofan Zhang
Minimum Latency Deep Online Video Stabilization
Dec 05, 2022
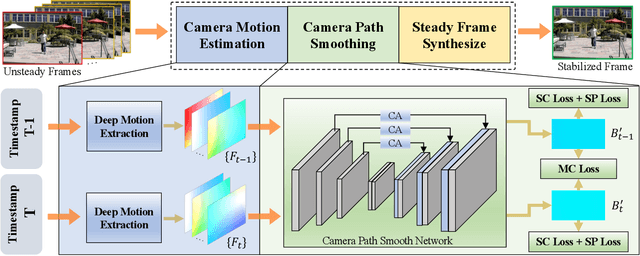
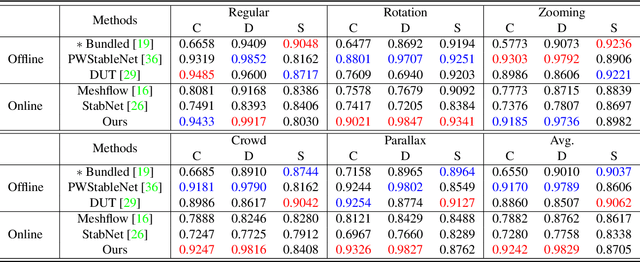
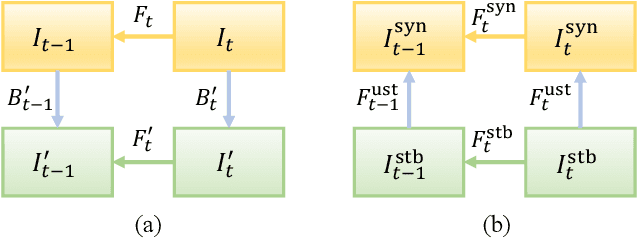
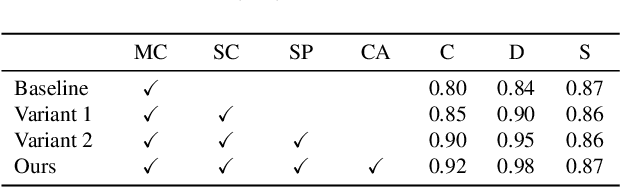
We present a novel camera path optimization framework for the task of online video stabilization. Typically, a stabilization pipeline consists of three steps: motion estimating, path smoothing, and novel view rendering. Most previous methods concentrate on motion estimation, proposing various global or local motion models. In contrast, path optimization receives relatively less attention, especially in the important online setting, where no future frames are available. In this work, we adopt recent off-the-shelf high-quality deep motion models for the motion estimation to recover the camera trajectory and focus on the latter two steps. Our network takes a short 2D camera path in a sliding window as input and outputs the stabilizing warp field of the last frame in the window, which warps the coming frame to its stabilized position. A hybrid loss is well-defined to constrain the spatial and temporal consistency. In addition, we build a motion dataset that contains stable and unstable motion pairs for the training. Extensive experiments demonstrate that our approach significantly outperforms state-of-the-art online methods both qualitatively and quantitatively and achieves comparable performance to offline methods.
The Effect of Training Parameters and Mechanisms on Decentralized Federated Learning based on MNIST Dataset
Aug 07, 2021



Federated Learning is an algorithm suited for training models on decentralized data, but the requirement of a central "server" node is a bottleneck. In this document, we first introduce the notion of Decentralized Federated Learning (DFL). We then perform various experiments on different setups, such as changing model aggregation frequency, switching from independent and identically distributed (IID) dataset partitioning to non-IID partitioning with partial global sharing, using different optimization methods across clients, and breaking models into segments with partial sharing. All experiments are run on the MNIST handwritten digits dataset. We observe that those altered training procedures are generally robust, albeit non-optimal. We also observe failures in training when the variance between model weights is too large. The open-source experiment code is accessible through GitHub\footnote{Code was uploaded at \url{https://github.com/zhzhang2018/DecentralizedFL}}.