 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZihan Fang
AgentsCoDriver: Large Language Model Empowered Collaborative Driving with Lifelong Learning
Apr 09, 2024
Connected and autonomous driving is developing rapidly in recent years. However, current autonomous driving systems, which are primarily based on data-driven approaches, exhibit deficiencies in interpretability, generalization, and continuing learning capabilities. In addition, the single-vehicle autonomous driving systems lack of the ability of collaboration and negotiation with other vehicles, which is crucial for the safety and efficiency of autonomous driving systems. In order to address these issues, we leverage large language models (LLMs) to develop a novel framework, AgentsCoDriver, to enable multiple vehicles to conduct collaborative driving. AgentsCoDriver consists of five modules: observation module, reasoning engine, cognitive memory module, reinforcement reflection module, and communication module. It can accumulate knowledge, lessons, and experiences over time by continuously interacting with the environment, thereby making itself capable of lifelong learning. In addition, by leveraging the communication module, different agents can exchange information and realize negotiation and collaboration in complex traffic environments. Extensive experiments are conducted and show the superiority of AgentsCoDriver.
Automated Federated Pipeline for Parameter-Efficient Fine-Tuning of Large Language Models
Apr 09, 2024Recently, there has been a surge in the development of advanced intelligent generative content (AIGC), especially large language models (LLMs). However, for many downstream tasks, it is necessary to fine-tune LLMs using private data. While federated learning offers a promising privacy-preserving solution to LLM fine-tuning, the substantial size of an LLM, combined with high computational and communication demands, makes it hard to apply to downstream tasks. More importantly, private edge servers often possess varying computing and network resources in real-world scenarios, introducing additional complexities to LLM fine-tuning. To tackle these problems, we design and implement an automated federated pipeline, named FedPipe, to fine-tune LLMs with minimal training cost but without adding any inference latency. FedPipe firstly identifies the weights to be fine-tuned based on their contributions to the LLM training. It then configures a low-rank adapter for each selected weight to train local low-rank adapters on an edge server, and aggregate local adapters of all edge servers to fine-tune the whole LLM. Finally, it appropriately quantizes the parameters of LLM to reduce memory space according to the requirements of edge servers. Extensive experiments demonstrate that FedPipe expedites the model training and achieves higher accuracy than state-of-the-art benchmarks.
FedSN: A General Federated Learning Framework over LEO Satellite Networks
Nov 02, 2023Recently, a large number of Low Earth Orbit (LEO) satellites have been launched and deployed successfully in space by commercial companies, such as SpaceX. Due to multimodal sensors equipped by the LEO satellites, they serve not only for communication but also for various machine learning applications, such as space modulation recognition, remote sensing image classification, etc. However, the ground station (GS) may be incapable of downloading such a large volume of raw sensing data for centralized model training due to the limited contact time with LEO satellites (e.g. 5 minutes). Therefore, federated learning (FL) has emerged as the promising solution to address this problem via on-device training. Unfortunately, to enable FL on LEO satellites, we still face three critical challenges that are i) heterogeneous computing and memory capabilities, ii) limited uplink rate, and iii) model staleness. To this end, we propose FedSN as a general FL framework to tackle the above challenges, and fully explore data diversity on LEO satellites. Specifically, we first present a novel sub-structure scheme to enable heterogeneous local model training considering different computing, memory, and communication constraints on LEO satellites. Additionally, we propose a pseudo-synchronous model aggregation strategy to dynamically schedule model aggregation for compensating model staleness. To further demonstrate the effectiveness of the FedSN, we evaluate it using space modulation recognition and remote sensing image classification tasks by leveraging the data from real-world satellite networks. Extensive experimental results demonstrate that FedSN framework achieves higher accuracy, lower computing, and communication overhead than the state-of-the-art benchmarks and the effectiveness of each components in FedSN.
Bridging Trustworthiness and Open-World Learning: An Exploratory Neural Approach for Enhancing Interpretability, Generalization, and Robustness
Aug 07, 2023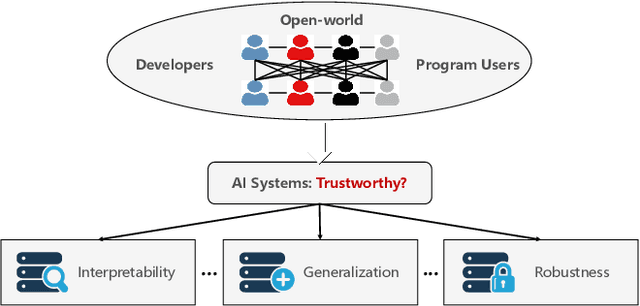


As researchers strive to narrow the gap between machine intelligence and human through the development of artificial intelligence technologies, it is imperative that we recognize the critical importance of trustworthiness in open-world, which has become ubiquitous in all aspects of daily life for everyone. However, several challenges may create a crisis of trust in current artificial intelligence systems that need to be bridged: 1) Insufficient explanation of predictive results; 2) Inadequate generalization for learning models; 3) Poor adaptability to uncertain environments. Consequently, we explore a neural program to bridge trustworthiness and open-world learning, extending from single-modal to multi-modal scenarios for readers. 1) To enhance design-level interpretability, we first customize trustworthy networks with specific physical meanings; 2) We then design environmental well-being task-interfaces via flexible learning regularizers for improving the generalization of trustworthy learning; 3) We propose to increase the robustness of trustworthy learning by integrating open-world recognition losses with agent mechanisms. Eventually, we enhance various trustworthy properties through the establishment of design-level explainability, environmental well-being task-interfaces and open-world recognition programs. These designed open-world protocols are applicable across a wide range of surroundings, under open-world multimedia recognition scenarios with significant performance improvements observed.