 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZiqi Lin
Multiagent Reinforcement Learning with an Attention Mechanism for Improving Energy Efficiency in LoRa Networks
Sep 16, 2023
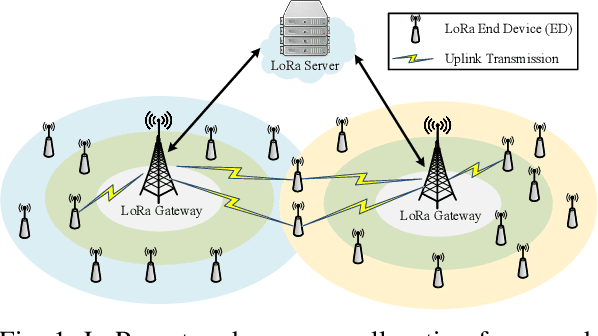
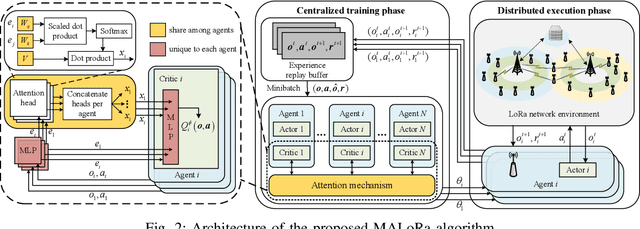
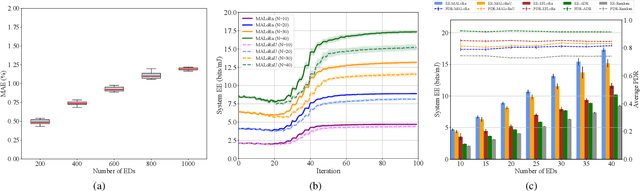
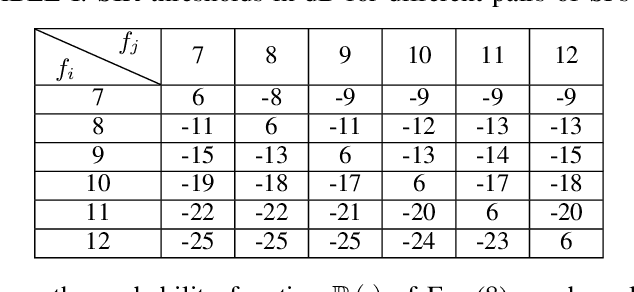
Long Range (LoRa) wireless technology, characterized by low power consumption and a long communication range, is regarded as one of the enabling technologies for the Industrial Internet of Things (IIoT). However, as the network scale increases, the energy efficiency (EE) of LoRa networks decreases sharply due to severe packet collisions. To address this issue, it is essential to appropriately assign transmission parameters such as the spreading factor and transmission power for each end device (ED). However, due to the sporadic traffic and low duty cycle of LoRa networks, evaluating the system EE performance under different parameter settings is time-consuming. Therefore, we first formulate an analytical model to calculate the system EE. On this basis, we propose a transmission parameter allocation algorithm based on multiagent reinforcement learning (MALoRa) with the aim of maximizing the system EE of LoRa networks. Notably, MALoRa employs an attention mechanism to guide each ED to better learn how much ''attention'' should be given to the parameter assignments for relevant EDs when seeking to improve the system EE. Simulation results demonstrate that MALoRa significantly improves the system EE compared with baseline algorithms with an acceptable degradation in packet delivery rate (PDR).
DTact: A Vision-Based Tactile Sensor that Measures High-Resolution 3D Geometry Directly from Darkness
Sep 28, 2022



Vision-based tactile sensors that can measure 3D geometry of the contacting objects are crucial for robots to perform dexterous manipulation tasks. However, the existing sensors are usually complicated to fabricate and delicate to extend. In this work, we novelly take advantage of the reflection property of semitransparent elastomer to design a robust, low-cost, and easy-to-fabricate tactile sensor named DTact. DTact measures high-resolution 3D geometry accurately from the darkness shown in the captured tactile images with only a single image for calibration. In contrast to previous sensors, DTact is robust under various illumination conditions. Then, we build prototypes of DTact that have non-planar contact surfaces with minimal extra efforts and costs. Finally, we perform two intelligent robotic tasks including pose estimation and object recognition using DTact, in which DTact shows large potential in applications.