 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic RGB-D Odometry based on Points, Lines and Planes Under Depth Uncertainty
Jan 18, 2018
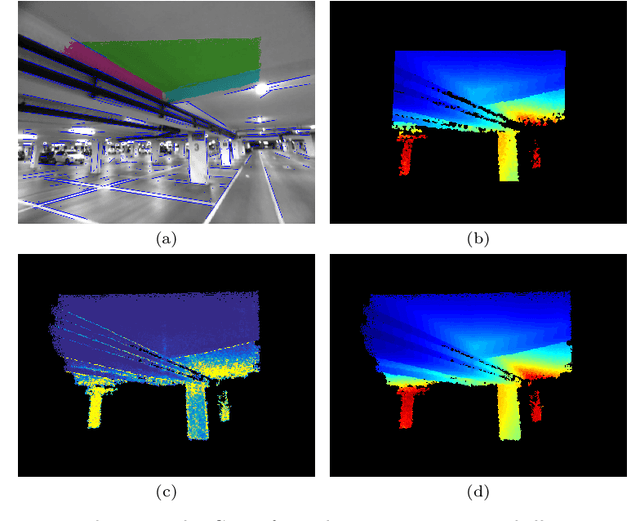
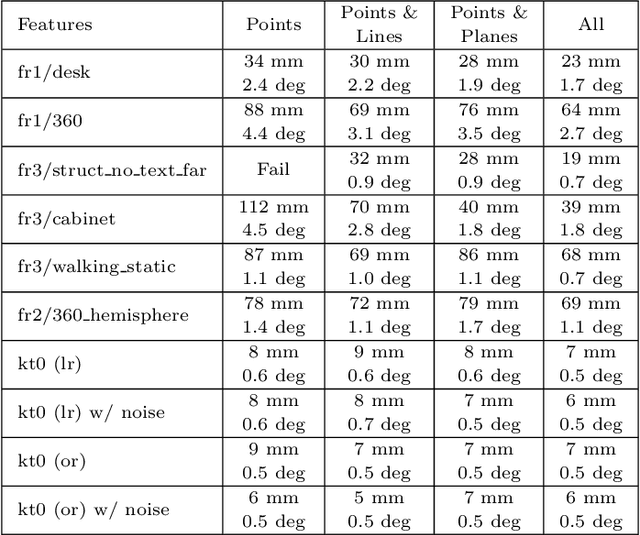
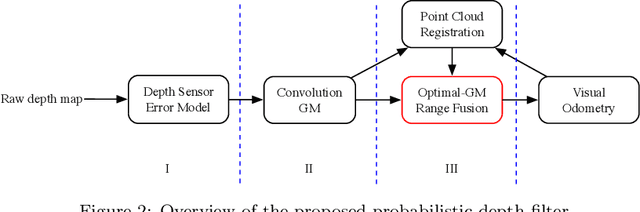
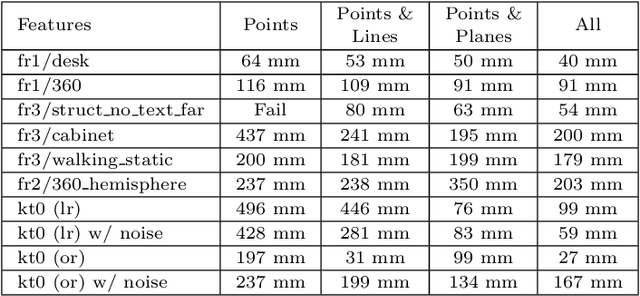
This work proposes a robust visual odometry method for structured environments that combines point features with line and plane segments, extracted through an RGB-D camera. Noisy depth maps are processed by a probabilistic depth fusion framework based on Mixtures of Gaussians to denoise and derive the depth uncertainty, which is then propagated throughout the visual odometry pipeline. Probabilistic 3D plane and line fitting solutions are used to model the uncertainties of the feature parameters and pose is estimated by combining the three types of primitives based on their uncertainties. Performance evaluation on RGB-D sequences collected in this work and two public RGB-D datasets: TUM and ICL-NUIM show the benefit of using the proposed depth fusion framework and combining the three feature-types, particularly in scenes with low-textured surfaces, dynamic objects and missing depth measurements.