 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePedro F. Proenca
Deep Learning for Spacecraft Pose Estimation from Photorealistic Rendering
Aug 29, 2019
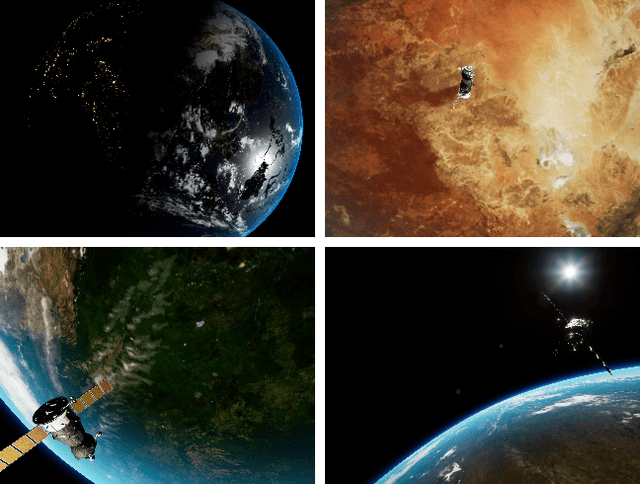
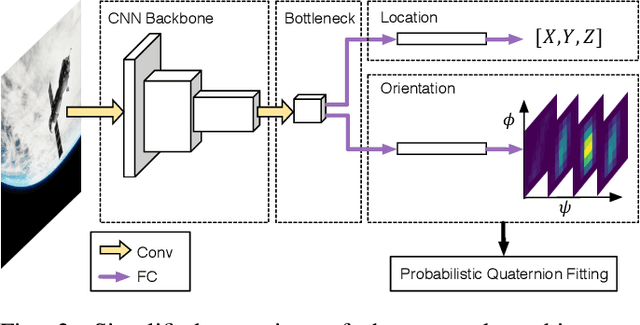
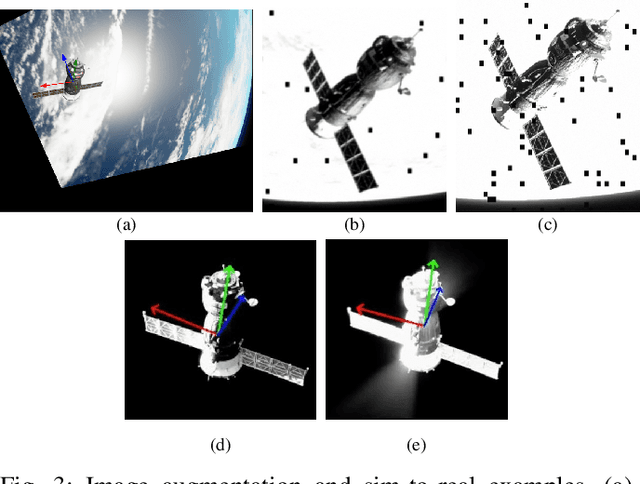
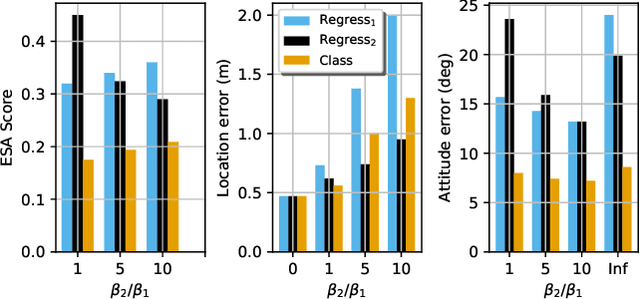
On-orbit proximity operations in space rendezvous, docking and debris removal require precise and robust 6D pose estimation under a wide range of lighting conditions and against highly textured background, i.e., the Earth. This paper investigates leveraging deep learning and photorealistic rendering for monocular pose estimation of known uncooperative spacecrafts. We first present a simulator built on Unreal Engine 4, named URSO, to generate labeled images of spacecrafts orbiting the Earth, which can be used to train and evaluate neural networks. Secondly, we propose a deep learning framework for pose estimation based on orientation soft classification, which allows modelling orientation ambiguity as a mixture of Gaussians. This framework was evaluated both on URSO datasets and the ESA pose estimation challenge. In this competition, our best model achieved 3rd place on the synthetic test set and 2nd place on the real test set. Moreover, our results show the impact of several architectural and training aspects, and we demonstrate qualitatively how models learned on URSO datasets can perform on real images from space.
Probabilistic RGB-D Odometry based on Points, Lines and Planes Under Depth Uncertainty
Jan 18, 2018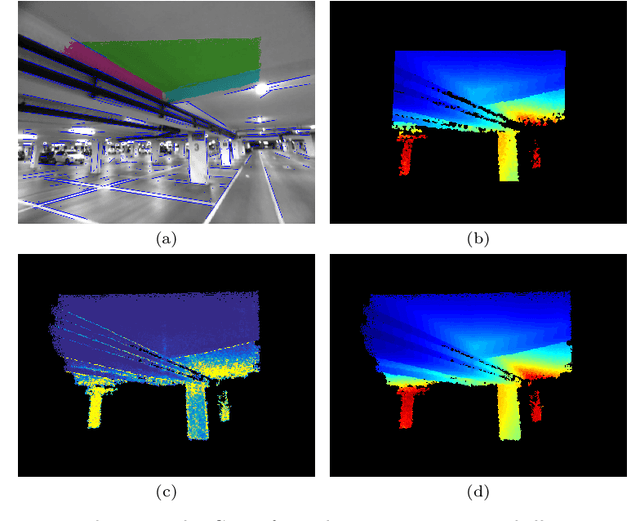
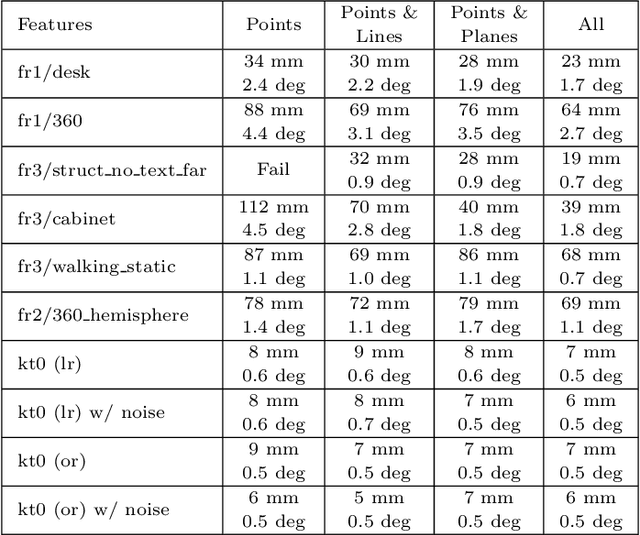
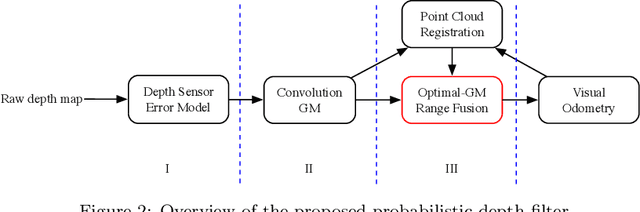
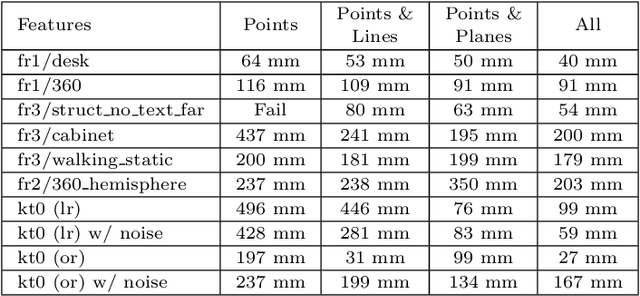
This work proposes a robust visual odometry method for structured environments that combines point features with line and plane segments, extracted through an RGB-D camera. Noisy depth maps are processed by a probabilistic depth fusion framework based on Mixtures of Gaussians to denoise and derive the depth uncertainty, which is then propagated throughout the visual odometry pipeline. Probabilistic 3D plane and line fitting solutions are used to model the uncertainties of the feature parameters and pose is estimated by combining the three types of primitives based on their uncertainties. Performance evaluation on RGB-D sequences collected in this work and two public RGB-D datasets: TUM and ICL-NUIM show the benefit of using the proposed depth fusion framework and combining the three feature-types, particularly in scenes with low-textured surfaces, dynamic objects and missing depth measurements.